
























Siemens curso básico de los motores AC.pdf
- 1. Conceptos básicos de los motores de CA Un curso en línea quickSTEP © Siemens Industry, Inc. www.usa.siemens.com/step Traducido del inglés al español - www.onlinedoctranslator.com
- 2. Marcas comerciales Siemens es una marca comercial de Siemens AG. Los nombres de productos mencionados pueden ser marcas comerciales o marcas registradas de sus respectivas empresas. National Electrical Code® y NEC® son marcas registradas de la National Fire Protection Association, Quincy, MA 02169. NEMA® es una marca registrada y marca de servicio de la Asociación Nacional de Fabricantes Eléctricos, Rosslyn, VA 22209. Underwriters Laboratories Inc.® y UL® son marcas registradas de Underwriters Laboratories, Inc., Northbrook, IL 60062-2026. Otras marcas comerciales son propiedad de sus respectivos dueños. © Siemens Industry, Inc. 2016 Página 1-2
- 3. Temas del curso Bienvenido a Fundamentos de Motores de CA. Este curso abarca los siguientes temas: Capítulo 1 - Introducción • Conceptos básicos Capítulo 2 – Fundamentos del motor • Electromagnetismo • Rotación del rotor Capítulo 3 – Motores NEMA • Diseños de motores • Cerramientos de motores Capítulo 4 – Siemens Motors • Motores NEMA • Motores IEC • Motores superiores a NEMA Si no comprende los conceptos eléctricos básicos, debe completar Conceptos básicos de electricidad antes de intentar este curso. © Siemens Industry, Inc. 2016 Página 1-3
- 4. Objetivos del curso Al finalizar este curso usted será capaz de… • Explicar los conceptos de fuerza, inercia, velocidad y torque. • Explicar la diferencia entre trabajo y potencia. • Describir la construcción de un motor de CA de jaula de ardilla. • Describir el funcionamiento de un campo magnético giratorio. • Calcular la velocidad síncrona, el deslizamiento y la velocidad del rotor. • Identificar el par de arranque, el par de arranque, el par de ruptura y el par a plena carga en una curva de velocidad-par de un motor NEMA B • Describir la información que se muestra en una placa de identificación de un motor NEMA • Identificar factores importantes de reducción de potencia del motor • Identificar gabinetes NEMA y configuraciones de montaje • Resumir los tipos de motores Siemens SIMOTICS disponibles © Siemens Industry, Inc. 2016 Página 1-4
- 5. Motores SIMOTICS Este curso se centra principalmente en desarrollar sus conocimientos básicos sobre los motores de inducción trifásicos NEMA, que forman parte de la extensa línea de motores SIMOTICS de Siemens. Los motores eléctricos industriales SIMOTICS le ofrecen la solución óptima para cada aplicación. Con 150 años de experiencia, los motores SIMOTICS son inigualables en cuanto a fiabilidad, robustez, compacidad, eficiencia y rendimiento. Los motores eléctricos SIMOTICS incluyen: • Motores de CA de bajo voltaje para operación de línea y convertidor • Motores de control de movimiento precisos con un rendimiento altamente dinámico para posicionamiento y manipulación, así como para su uso en máquinas de producción y máquinas herramienta. • Motores de CC y potentes motores de alto voltaje para uso en barcos, laminadores, molinos de mineral y grandes bombas de lodo y compresores en la industria del petróleo y el gas. © Siemens Industry, Inc. 2016 Página 1-5
- 6. SITRAIN®Formación para la industria Aprendizaje en línea a su propio ritmo: programas con máxima flexibilidad para que los estudiantes puedan adaptar fácilmente los cursos a sus ocupadas agendas. Aprendizaje virtual dirigido por un instructor: clases en el aula impartidas en la comodidad de su hogar u oficina. Aprendizaje en el aula: instructores expertos y profesionales, cursos probados y estaciones de trabajo de calidad se combinan para brindar la experiencia de aula más efectiva posible en sus instalaciones o en las nuestras. Videoteca instructiva: opciones de aprendizaje rápidas, asequibles y basadas en tareas para una amplia gama de temas de automatización para capacitación o compra. Simuladores: sistemas de simulación de clase mundial disponibles para capacitación o compra. Este curso también describe las opciones de aprendizaje disponibles en Siemens SITRAIN USA y nuestros socios globales de SITRAIN. Para más información:www.usa.siemens.com/sitrain © Siemens Industry, Inc. 2016 Página 1-6
- 7. Capítulo 1 – Introducción Este capítulo cubre los siguientes temas: • Conceptos básicos • Construcción de motores de CA © Siemens Industry, Inc. 2016 Página 1-7
- 8. Motores de CA Los motores de CA se utilizan en todo el mundo en numerosas aplicaciones para transformar energía eléctrica en energía mecánica. Existen muchos tipos de motores de CA, pero este curso se centra en los motores de inducción trifásicos, el tipo de motor más común en aplicaciones industriales. Un motor de CA de este tipo puede formar parte de una bomba o un ventilador, o estar conectado a otro tipo de equipo mecánico, como una bobinadora, una cinta transportadora o una mezcladora. Siemens fabrica una amplia variedad de motores de CA. Además de proporcionar información básica sobre los motores de CA en general, este curso también incluye una descripción general de los motores de CA Siemens SIMOTICS NEMA, que van desde motores de propósito general en marco de aluminio hasta sofisticados motores trifásicos que cumplen o superan las normas IEEE 841 y NEMA Premium.®normas. También se incluye información resumida para motores Siemens IEC y superiores NEMA. © Siemens Industry, Inc. 2016 Página 1-8
- 9. Organizaciones de normalización A lo largo de este curso, se hace referencia a la Asociación Nacional de Fabricantes Eléctricos (NEMA). NEMA desarrolla normas para una amplia gama de productos eléctricos, incluyendo motores de CA. Por ejemplo, la Publicación de Normas NEMA MG 1 abarca los motores de CA con tamaño de carcasa NEMA, comúnmente conocidos como motores NEMA. Además de fabricar motores NEMA, Siemens también fabrica motores de mayor tamaño que el tamaño máximo de carcasa NEMA. Estos motores están diseñados para cumplir con los requisitos específicos de cada aplicación y se conocen comúnmente como motores NEMA superiores. Siemens también fabrica motores según las normas de la Comisión Electrotécnica Internacional (IEC). La IEC es otra organización responsable de las normas eléctricas. Las normas IEC cumplen la misma función que las NEMA, pero difieren en muchos aspectos. En muchos países, los equipos eléctricos suelen diseñarse para cumplir con las normas IEC. En Estados Unidos, aunque se utilizan motores IEC, los motores NEMA son más comunes. Sin embargo, tenga en cuenta que muchas empresas estadounidenses fabrican productos para exportar a países que cumplen con las normas IEC. © Siemens Industry, Inc. 2016 Página 1-9
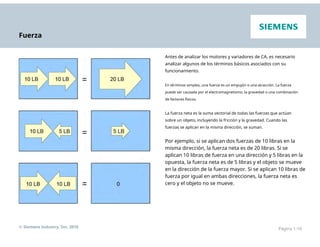
- 10. Fuerza Antes de analizar los motores y variadores de CA, es necesario analizar algunos de los términos básicos asociados con su funcionamiento. En términos simples, una fuerza es un empujón o una atracción. La fuerza puede ser causada por el electromagnetismo, la gravedad o una combinación de factores físicos. La fuerza neta es la suma vectorial de todas las fuerzas que actúan sobre un objeto, incluyendo la fricción y la gravedad. Cuando las fuerzas se aplican en la misma dirección, se suman. Por ejemplo, si se aplican dos fuerzas de 10 libras en la misma dirección, la fuerza neta es de 20 libras. Si se aplican 10 libras de fuerza en una dirección y 5 libras en la opuesta, la fuerza neta es de 5 libras y el objeto se mueve en la dirección de la fuerza mayor. Si se aplican 10 libras de fuerza por igual en ambas direcciones, la fuerza neta es cero y el objeto no se mueve. © Siemens Industry, Inc. 2016 Página 1-10
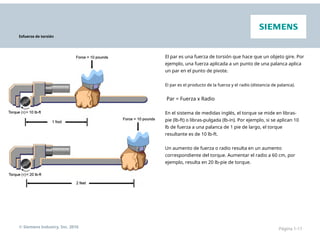
- 11. Esfuerzo de torsión El par es una fuerza de torsión que hace que un objeto gire. Por ejemplo, una fuerza aplicada a un punto de una palanca aplica un par en el punto de pivote. El par es el producto de la fuerza y el radio (distancia de palanca). Par = Fuerza x Radio En el sistema de medidas inglés, el torque se mide en libras- pie (lb-ft) o libras-pulgada (lb-in). Por ejemplo, si se aplican 10 lb de fuerza a una palanca de 1 pie de largo, el torque resultante es de 10 lb-ft. Un aumento de fuerza o radio resulta en un aumento correspondiente del torque. Aumentar el radio a 60 cm, por ejemplo, resulta en 20 lb-pie de torque. © Siemens Industry, Inc. 2016 Página 1-11
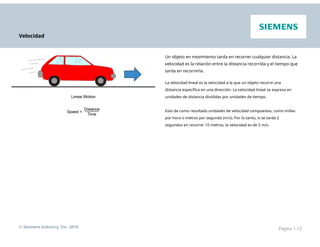
- 12. Velocidad Un objeto en movimiento tarda en recorrer cualquier distancia. La velocidad es la relación entre la distancia recorrida y el tiempo que tarda en recorrerla. La velocidad lineal es la velocidad a la que un objeto recorre una distancia específica en una dirección. La velocidad lineal se expresa en unidades de distancia divididas por unidades de tiempo. Esto da como resultado unidades de velocidad compuestas, como millas por hora o metros por segundo (m/s). Por lo tanto, si se tarda 2 segundos en recorrer 10 metros, la velocidad es de 5 m/s. © Siemens Industry, Inc. 2016 Página 1-12
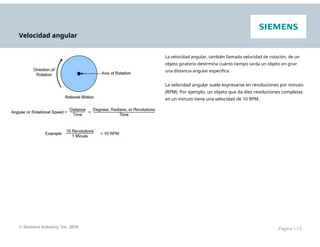
- 13. Velocidad angular La velocidad angular, también llamada velocidad de rotación, de un objeto giratorio determina cuánto tiempo tarda un objeto en girar una distancia angular específica. La velocidad angular suele expresarse en revoluciones por minuto (RPM). Por ejemplo, un objeto que da diez revoluciones completas en un minuto tiene una velocidad de 10 RPM. © Siemens Industry, Inc. 2016 Página 1-13
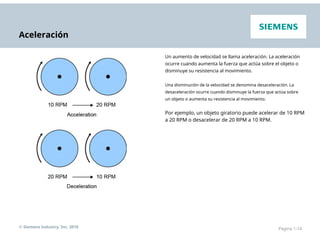
- 14. Aceleración Un aumento de velocidad se llama aceleración. La aceleración ocurre cuando aumenta la fuerza que actúa sobre el objeto o disminuye su resistencia al movimiento. Una disminución de la velocidad se denomina desaceleración. La desaceleración ocurre cuando disminuye la fuerza que actúa sobre un objeto o aumenta su resistencia al movimiento. Por ejemplo, un objeto giratorio puede acelerar de 10 RPM a 20 RPM o desacelerar de 20 RPM a 10 RPM. © Siemens Industry, Inc. 2016 Página 1-14
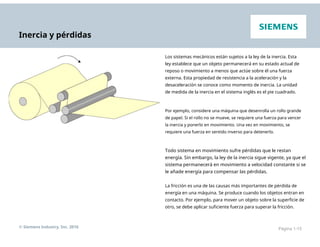
- 15. Inercia y pérdidas Los sistemas mecánicos están sujetos a la ley de la inercia. Esta ley establece que un objeto permanecerá en su estado actual de reposo o movimiento a menos que actúe sobre él una fuerza externa. Esta propiedad de resistencia a la aceleración y la desaceleración se conoce como momento de inercia. La unidad de medida de la inercia en el sistema inglés es el pie cuadrado. Por ejemplo, considere una máquina que desenrolla un rollo grande de papel. Si el rollo no se mueve, se requiere una fuerza para vencer la inercia y ponerlo en movimiento. Una vez en movimiento, se requiere una fuerza en sentido inverso para detenerlo. Todo sistema en movimiento sufre pérdidas que le restan energía. Sin embargo, la ley de la inercia sigue vigente, ya que el sistema permanecerá en movimiento a velocidad constante si se le añade energía para compensar las pérdidas. La fricción es una de las causas más importantes de pérdida de energía en una máquina. Se produce cuando los objetos entran en contacto. Por ejemplo, para mover un objeto sobre la superficie de otro, se debe aplicar suficiente fuerza para superar la fricción. © Siemens Industry, Inc. 2016 Página 1-15
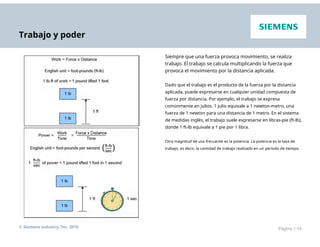
- 16. Trabajo y poder Siempre que una fuerza provoca movimiento, se realiza trabajo. El trabajo se calcula multiplicando la fuerza que provoca el movimiento por la distancia aplicada. Dado que el trabajo es el producto de la fuerza por la distancia aplicada, puede expresarse en cualquier unidad compuesta de fuerza por distancia. Por ejemplo, el trabajo se expresa comúnmente en julios. 1 julio equivale a 1 newton-metro, una fuerza de 1 newton para una distancia de 1 metro. En el sistema de medidas inglés, el trabajo suele expresarse en libras-pie (ft-lb), donde 1 ft-lb equivale a 1 pie por 1 libra. Otra magnitud de uso frecuente es la potencia. La potencia es la tasa de trabajo, es decir, la cantidad de trabajo realizado en un período de tiempo. © Siemens Industry, Inc. 2016 Página 1-16
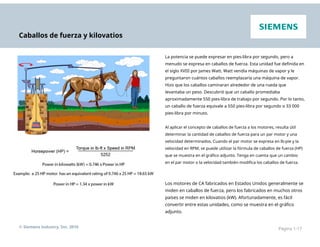
- 17. Caballos de fuerza y kilovatios La potencia se puede expresar en pies-libra por segundo, pero a menudo se expresa en caballos de fuerza. Esta unidad fue definida en el siglo XVIII por James Watt. Watt vendía máquinas de vapor y le preguntaron cuántos caballos reemplazaría una máquina de vapor. Hizo que los caballos caminaran alrededor de una rueda que levantaba un peso. Descubrió que un caballo promediaba aproximadamente 550 pies-libra de trabajo por segundo. Por lo tanto, un caballo de fuerza equivale a 550 pies-libra por segundo o 33 000 pies-libra por minuto. Al aplicar el concepto de caballos de fuerza a los motores, resulta útil determinar la cantidad de caballos de fuerza para un par motor y una velocidad determinados. Cuando el par motor se expresa en lb-pie y la velocidad en RPM, se puede utilizar la fórmula de caballos de fuerza (HP) que se muestra en el gráfico adjunto. Tenga en cuenta que un cambio en el par motor o la velocidad también modifica los caballos de fuerza. Los motores de CA fabricados en Estados Unidos generalmente se miden en caballos de fuerza, pero los fabricados en muchos otros países se miden en kilovatios (kW). Afortunadamente, es fácil convertir entre estas unidades, como se muestra en el gráfico adjunto. © Siemens Industry, Inc. 2016 Página 1-17
- 18. Capítulo 1 – Introducción Este capítulo cubre los siguientes temas: • Conceptos básicos • Construcción de motores de CA © Siemens Industry, Inc. 2016 Página 1-18
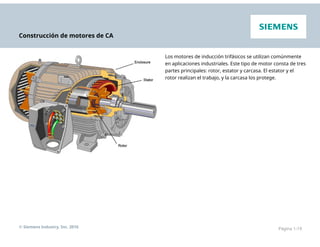
- 19. Construcción de motores de CA Los motores de inducción trifásicos se utilizan comúnmente en aplicaciones industriales. Este tipo de motor consta de tres partes principales: rotor, estator y carcasa. El estator y el rotor realizan el trabajo, y la carcasa los protege. © Siemens Industry, Inc. 2016 Página 1-19
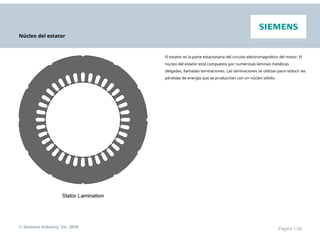
- 20. Núcleo del estator El estator es la parte estacionaria del circuito electromagnético del motor. El núcleo del estator está compuesto por numerosas láminas metálicas delgadas, llamadas laminaciones. Las laminaciones se utilizan para reducir las pérdidas de energía que se producirían con un núcleo sólido. © Siemens Industry, Inc. 2016 Página 1-20
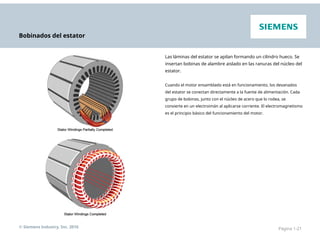
- 21. Bobinados del estator Las láminas del estator se apilan formando un cilindro hueco. Se insertan bobinas de alambre aislado en las ranuras del núcleo del estator. Cuando el motor ensamblado está en funcionamiento, los devanados del estator se conectan directamente a la fuente de alimentación. Cada grupo de bobinas, junto con el núcleo de acero que lo rodea, se convierte en un electroimán al aplicarse corriente. El electromagnetismo es el principio básico del funcionamiento del motor. © Siemens Industry, Inc. 2016 Página 1-21
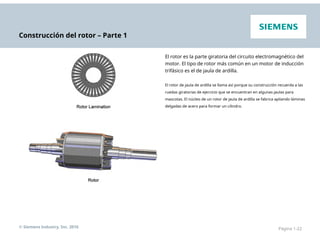
- 22. Construcción del rotor – Parte 1 El rotor es la parte giratoria del circuito electromagnético del motor. El tipo de rotor más común en un motor de inducción trifásico es el de jaula de ardilla. El rotor de jaula de ardilla se llama así porque su construcción recuerda a las ruedas giratorias de ejercicio que se encuentran en algunas jaulas para mascotas. El núcleo de un rotor de jaula de ardilla se fabrica apilando láminas delgadas de acero para formar un cilindro. © Siemens Industry, Inc. 2016 Página 1-22
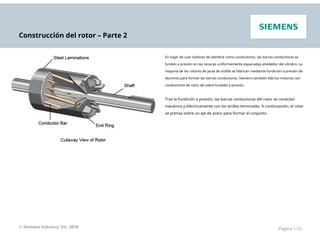
- 23. Construcción del rotor – Parte 2 En lugar de usar bobinas de alambre como conductores, las barras conductoras se funden a presión en las ranuras uniformemente espaciadas alrededor del cilindro. La mayoría de los rotores de jaula de ardilla se fabrican mediante fundición a presión de aluminio para formar las barras conductoras. Siemens también fabrica motores con conductores de rotor de cobre fundido a presión. Tras la fundición a presión, las barras conductoras del rotor se conectan mecánica y eléctricamente con los anillos terminales. A continuación, el rotor se prensa sobre un eje de acero para formar el conjunto. © Siemens Industry, Inc. 2016 Página 1-23
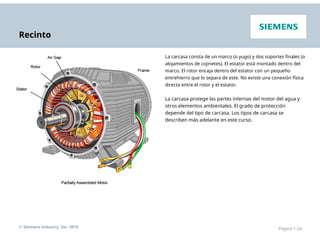
- 24. Recinto La carcasa consta de un marco (o yugo) y dos soportes finales (o alojamientos de cojinetes). El estator está montado dentro del marco. El rotor encaja dentro del estator con un pequeño entrehierro que lo separa de este. No existe una conexión física directa entre el rotor y el estator. La carcasa protege las partes internas del motor del agua y otros elementos ambientales. El grado de protección depende del tipo de carcasa. Los tipos de carcasa se describen más adelante en este curso. © Siemens Industry, Inc. 2016 Página 1-24
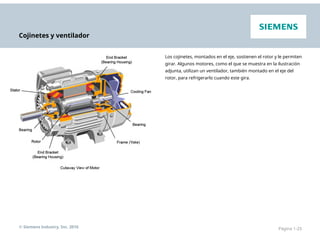
- 25. Cojinetes y ventilador Los cojinetes, montados en el eje, sostienen el rotor y le permiten girar. Algunos motores, como el que se muestra en la ilustración adjunta, utilizan un ventilador, también montado en el eje del rotor, para refrigerarlo cuando este gira. © Siemens Industry, Inc. 2016 Página 1-25
- 26. Aprendizaje en línea a su propio ritmo Con el aprendizaje a tu propio ritmo en línea de Siemens, tú eliges los temas y marcas tu propio ritmo para completar los cursos. Como todo el material del curso está en línea, puedes empezar a aprender en cuanto adquieras una suscripción. Puede elegir entre más de 500 cursos con gráficos de alta calidad, texto en pantalla, narración en off y ejercicios interactivos. Incluye contenido imprimible para consulta y vocabulario clave subrayado con definiciones que se muestran con solo pasar el ratón. Dependiendo de la suscripción adquirida, podrás elegir entre 10 o 25 cursos o seleccionar todo el catálogo de cursos online a tu propio ritmo. Estos cursos se ofrecen 24/7/365, así que puedes comenzar tu suscripción en cualquier momento. A partir de la fecha de inscripción, tienes un año para completar la selección de cursos. Para obtener información adicional:www.usa.siemens.com/sitrain © Siemens Industry, Inc. 2016 Página 1-26
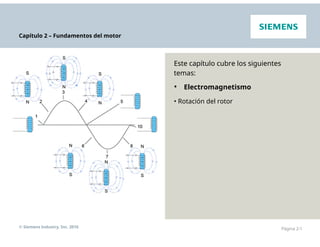
- 27. Capítulo 2 – Fundamentos del motor Este capítulo cubre los siguientes temas: • Electromagnetismo • Rotación del rotor © Siemens Industry, Inc. 2016 Página 2-1
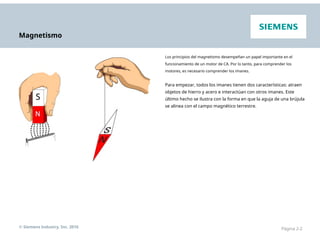
- 28. Magnetismo Los principios del magnetismo desempeñan un papel importante en el funcionamiento de un motor de CA. Por lo tanto, para comprender los motores, es necesario comprender los imanes. Para empezar, todos los imanes tienen dos características: atraen objetos de hierro y acero e interactúan con otros imanes. Este último hecho se ilustra con la forma en que la aguja de una brújula se alinea con el campo magnético terrestre. © Siemens Industry, Inc. 2016 Página 2-2
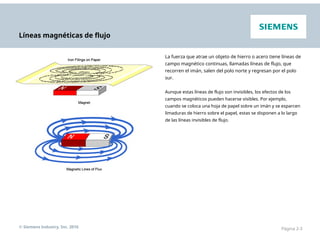
- 29. Líneas magnéticas de flujo La fuerza que atrae un objeto de hierro o acero tiene líneas de campo magnético continuas, llamadas líneas de flujo, que recorren el imán, salen del polo norte y regresan por el polo sur. Aunque estas líneas de flujo son invisibles, los efectos de los campos magnéticos pueden hacerse visibles. Por ejemplo, cuando se coloca una hoja de papel sobre un imán y se esparcen limaduras de hierro sobre el papel, estas se disponen a lo largo de las líneas invisibles de flujo. © Siemens Industry, Inc. 2016 Página 2-3
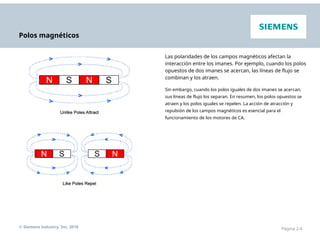
- 30. Polos magnéticos Las polaridades de los campos magnéticos afectan la interacción entre los imanes. Por ejemplo, cuando los polos opuestos de dos imanes se acercan, las líneas de flujo se combinan y los atraen. Sin embargo, cuando los polos iguales de dos imanes se acercan, sus líneas de flujo los separan. En resumen, los polos opuestos se atraen y los polos iguales se repelen. La acción de atracción y repulsión de los campos magnéticos es esencial para el funcionamiento de los motores de CA. © Siemens Industry, Inc. 2016 Página 2-4
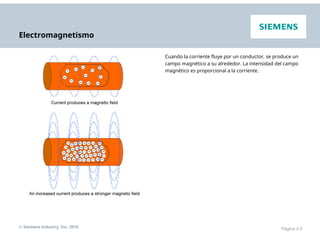
- 31. Electromagnetismo Cuando la corriente fluye por un conductor, se produce un campo magnético a su alrededor. La intensidad del campo magnético es proporcional a la corriente. © Siemens Industry, Inc. 2016 Página 2-5
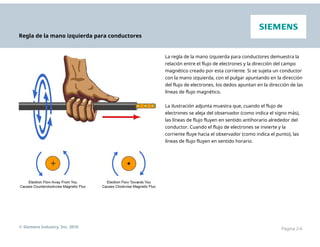
- 32. Regla de la mano izquierda para conductores La regla de la mano izquierda para conductores demuestra la relación entre el flujo de electrones y la dirección del campo magnético creado por esta corriente. Si se sujeta un conductor con la mano izquierda, con el pulgar apuntando en la dirección del flujo de electrones, los dedos apuntan en la dirección de las líneas de flujo magnético. La ilustración adjunta muestra que, cuando el flujo de electrones se aleja del observador (como indica el signo más), las líneas de flujo fluyen en sentido antihorario alrededor del conductor. Cuando el flujo de electrones se invierte y la corriente fluye hacia el observador (como indica el punto), las líneas de flujo fluyen en sentido horario. © Siemens Industry, Inc. 2016 Página 2-6
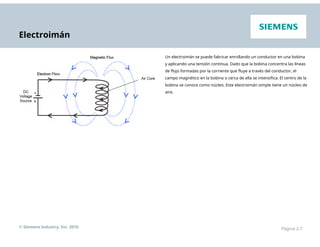
- 33. Electroimán Un electroimán se puede fabricar enrollando un conductor en una bobina y aplicando una tensión continua. Dado que la bobina concentra las líneas de flujo formadas por la corriente que fluye a través del conductor, el campo magnético en la bobina o cerca de ella se intensifica. El centro de la bobina se conoce como núcleo. Este electroimán simple tiene un núcleo de aire. © Siemens Industry, Inc. 2016 Página 2-7
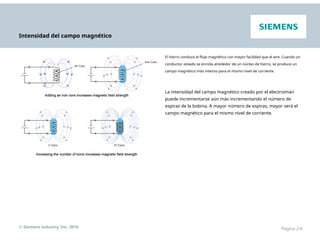
- 34. Intensidad del campo magnético El hierro conduce el flujo magnético con mayor facilidad que el aire. Cuando un conductor aislado se enrolla alrededor de un núcleo de hierro, se produce un campo magnético más intenso para el mismo nivel de corriente. La intensidad del campo magnético creado por el electroimán puede incrementarse aún más incrementando el número de espiras de la bobina. A mayor número de espiras, mayor será el campo magnético para el mismo nivel de corriente. © Siemens Industry, Inc. 2016 Página 2-8
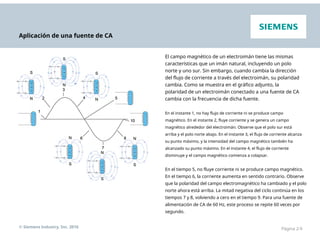
- 35. Aplicación de una fuente de CA El campo magnético de un electroimán tiene las mismas características que un imán natural, incluyendo un polo norte y uno sur. Sin embargo, cuando cambia la dirección del flujo de corriente a través del electroimán, su polaridad cambia. Como se muestra en el gráfico adjunto, la polaridad de un electroimán conectado a una fuente de CA cambia con la frecuencia de dicha fuente. En el instante 1, no hay flujo de corriente ni se produce campo magnético. En el instante 2, fluye corriente y se genera un campo magnético alrededor del electroimán. Observe que el polo sur está arriba y el polo norte abajo. En el instante 3, el flujo de corriente alcanza su punto máximo, y la intensidad del campo magnético también ha alcanzado su punto máximo. En el instante 4, el flujo de corriente disminuye y el campo magnético comienza a colapsar. En el tiempo 5, no fluye corriente ni se produce campo magnético. En el tiempo 6, la corriente aumenta en sentido contrario. Observe que la polaridad del campo electromagnético ha cambiado y el polo norte ahora está arriba. La mitad negativa del ciclo continúa en los tiempos 7 y 8, volviendo a cero en el tiempo 9. Para una fuente de alimentación de CA de 60 Hz, este proceso se repite 60 veces por segundo. © Siemens Industry, Inc. 2016 Página 2-9
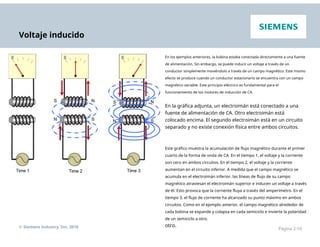
- 36. Voltaje inducido En los ejemplos anteriores, la bobina estaba conectada directamente a una fuente de alimentación. Sin embargo, se puede inducir un voltaje a través de un conductor simplemente moviéndolo a través de un campo magnético. Este mismo efecto se produce cuando un conductor estacionario se encuentra con un campo magnético variable. Este principio eléctrico es fundamental para el funcionamiento de los motores de inducción de CA. En la gráfica adjunta, un electroimán está conectado a una fuente de alimentación de CA. Otro electroimán está colocado encima. El segundo electroimán está en un circuito separado y no existe conexión física entre ambos circuitos. Este gráfico muestra la acumulación de flujo magnético durante el primer cuarto de la forma de onda de CA. En el tiempo 1, el voltaje y la corriente son cero en ambos circuitos. En el tiempo 2, el voltaje y la corriente aumentan en el circuito inferior. A medida que el campo magnético se acumula en el electroimán inferior, las líneas de flujo de su campo magnético atraviesan el electroimán superior e inducen un voltaje a través de él. Esto provoca que la corriente fluya a través del amperímetro. En el tiempo 3, el flujo de corriente ha alcanzado su punto máximo en ambos circuitos. Como en el ejemplo anterior, el campo magnético alrededor de cada bobina se expande y colapsa en cada semiciclo e invierte la polaridad de un semiciclo a otro. © Siemens Industry, Inc. 2016 otro. Página 2-10
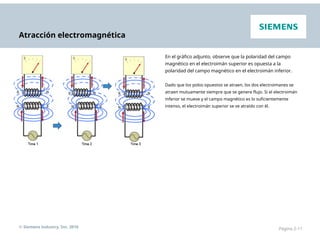
- 37. Atracción electromagnética En el gráfico adjunto, observe que la polaridad del campo magnético en el electroimán superior es opuesta a la polaridad del campo magnético en el electroimán inferior. Dado que los polos opuestos se atraen, los dos electroimanes se atraen mutuamente siempre que se genere flujo. Si el electroimán inferior se mueve y el campo magnético es lo suficientemente intenso, el electroimán superior se ve atraído con él. © Siemens Industry, Inc. 2016 Página 2-11
- 38. Aprendizaje virtual dirigido por un instructor Los cursos virtuales impartidos por instructores de Siemens le ofrecen una experiencia presencial con la comodidad y el ahorro del aprendizaje en línea. Estos cursos ofrecen instrucción práctica e interacción en vivo, impartidos desde cualquier lugar con conexión a internet. Los cursos programados suelen constar de agendas de 10 horas, impartidas de lunes a viernes en sesiones de dos horas. Estas sesiones incluyen conferencias, demostraciones, ejercicios de laboratorio y sesiones de preguntas y respuestas, todo impartido por expertos de Siemens en la materia. Durante todo el curso, podrá completar tareas y reforzar la enseñanza en el aula mediante una aplicación virtual basada en la nube que proporciona acceso las 24 horas, los 7 días de la semana a software Siemens totalmente funcional, como SIMATIC STEP 7 y PLCSIM. Para obtener información adicional:www.usa.siemens.com/sitrain © Siemens Industry, Inc. 2016 Página 2-12
- 39. Capítulo 2 – Fundamentos del motor Este capítulo cubre los siguientes temas: • Electromagnetismo • Rotación del rotor © Siemens Industry, Inc. 2016 Página 2-13
- 40. Bobinas del estator Los principios del electromagnetismo explican la rotación del eje de un motor de CA. Recordemos que el estator de un motor de CA es un cilindro hueco en el que se insertan bobinas de cable aislado. La parte inferior del diagrama adjunto muestra la configuración eléctrica de los devanados del estator. En este ejemplo, se utilizan seis devanados, dos para cada una de las tres fases. Las bobinas están enrolladas alrededor del núcleo de hierro dulce del estator. Al aplicar corriente, cada devanado se convierte en un electroimán, y los dos devanados de cada fase funcionan como los extremos opuestos de un imán. En otras palabras, las bobinas de cada fase están bobinadas de tal manera que, cuando circula corriente, un devanado es polo norte y el otro, polo sur. Por ejemplo, cuando A1 es polo norte, A2 es polo sur y, al invertirse la dirección de la corriente, también se invierten las polaridades de los devanados. © Siemens Industry, Inc. 2016 Página 2-14
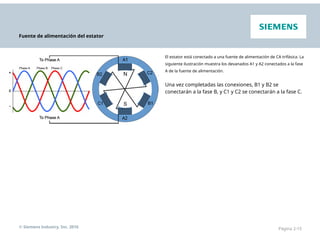
- 41. Fuente de alimentación del estator El estator está conectado a una fuente de alimentación de CA trifásica. La siguiente ilustración muestra los devanados A1 y A2 conectados a la fase A de la fuente de alimentación. Una vez completadas las conexiones, B1 y B2 se conectarán a la fase B, y C1 y C2 se conectarán a la fase C. © Siemens Industry, Inc. 2016 Página 2-15
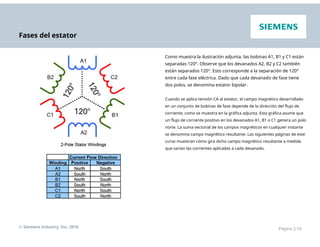
- 42. Fases del estator Como muestra la ilustración adjunta, las bobinas A1, B1 y C1 están separadas 120°. Observe que los devanados A2, B2 y C2 también están separados 120°. Esto corresponde a la separación de 120° entre cada fase eléctrica. Dado que cada devanado de fase tiene dos polos, se denomina estator bipolar. Cuando se aplica tensión CA al estator, el campo magnético desarrollado en un conjunto de bobinas de fase depende de la dirección del flujo de corriente, como se muestra en la gráfica adjunta. Esta gráfica asume que un flujo de corriente positivo en los devanados A1, B1 o C1 genera un polo norte. La suma vectorial de los campos magnéticos en cualquier instante se denomina campo magnético resultante. Las siguientes páginas de este curso muestran cómo gira dicho campo magnético resultante a medida que varían las corrientes aplicadas a cada devanado. © Siemens Industry, Inc. 2016 Página 2-16
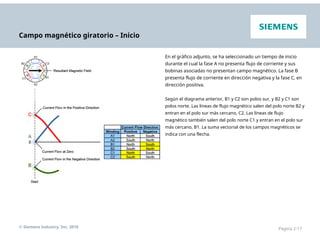
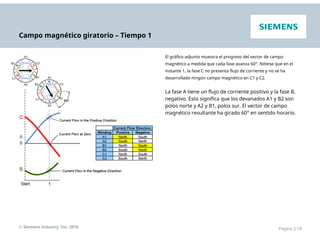
- 43. Campo magnético giratorio – Inicio En el gráfico adjunto, se ha seleccionado un tiempo de inicio durante el cual la fase A no presenta flujo de corriente y sus bobinas asociadas no presentan campo magnético. La fase B presenta flujo de corriente en dirección negativa y la fase C, en dirección positiva. Según el diagrama anterior, B1 y C2 son polos sur, y B2 y C1 son polos norte. Las líneas de flujo magnético salen del polo norte B2 y entran en el polo sur más cercano, C2. Las líneas de flujo magnético también salen del polo norte C1 y entran en el polo sur más cercano, B1. La suma vectorial de los campos magnéticos se indica con una flecha. © Siemens Industry, Inc. 2016 Página 2-17
- 44. Campo magnético giratorio – Tiempo 1 El gráfico adjunto muestra el progreso del vector de campo magnético a medida que cada fase avanza 60°. Nótese que en el instante 1, la fase C no presenta flujo de corriente y no se ha desarrollado ningún campo magnético en C1 y C2. La fase A tiene un flujo de corriente positivo y la fase B, negativo. Esto significa que los devanados A1 y B2 son polos norte y A2 y B1, polos sur. El vector de campo magnético resultante ha girado 60° en sentido horario. © Siemens Industry, Inc. 2016 Página 2-18
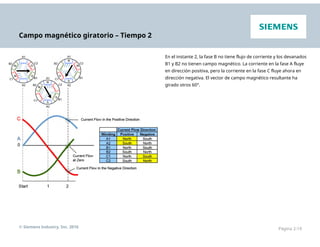
- 45. Campo magnético giratorio – Tiempo 2 En el instante 2, la fase B no tiene flujo de corriente y los devanados B1 y B2 no tienen campo magnético. La corriente en la fase A fluye en dirección positiva, pero la corriente en la fase C fluye ahora en dirección negativa. El vector de campo magnético resultante ha girado otros 60°. © Siemens Industry, Inc. 2016 Página 2-19
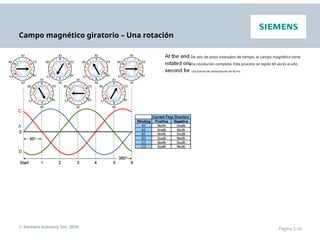
- 46. Campo magnético giratorio – Una rotación De seis de estos intervalos de tiempo, el campo magnético tiene una revolución completa. Este proceso se repite 60 veces al año. una fuente de alimentación de 60 Hz. © Siemens Industry, Inc. 2016 Página 2-20
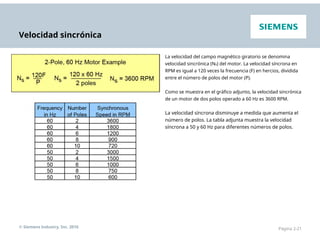
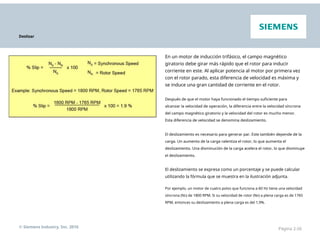
- 47. Velocidad sincrónica La velocidad del campo magnético giratorio se denomina velocidad sincrónica (Ns) del motor. La velocidad síncrona en RPM es igual a 120 veces la frecuencia (F) en hercios, dividida entre el número de polos del motor (P). Como se muestra en el gráfico adjunto, la velocidad sincrónica de un motor de dos polos operado a 60 Hz es 3600 RPM. La velocidad síncrona disminuye a medida que aumenta el número de polos. La tabla adjunta muestra la velocidad síncrona a 50 y 60 Hz para diferentes números de polos. © Siemens Industry, Inc. 2016 Página 2-21
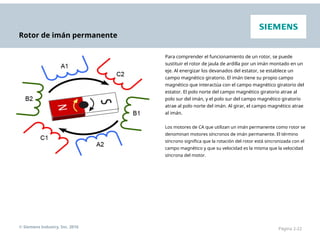
- 48. Rotor de imán permanente Para comprender el funcionamiento de un rotor, se puede sustituir el rotor de jaula de ardilla por un imán montado en un eje. Al energizar los devanados del estator, se establece un campo magnético giratorio. El imán tiene su propio campo magnético que interactúa con el campo magnético giratorio del estator. El polo norte del campo magnético giratorio atrae al polo sur del imán, y el polo sur del campo magnético giratorio atrae al polo norte del imán. Al girar, el campo magnético atrae al imán. Los motores de CA que utilizan un imán permanente como rotor se denominan motores síncronos de imán permanente. El término síncrono significa que la rotación del rotor está sincronizada con el campo magnético y que su velocidad es la misma que la velocidad síncrona del motor. © Siemens Industry, Inc. 2016 Página 2-22
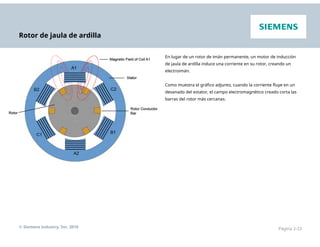
- 49. Rotor de jaula de ardilla En lugar de un rotor de imán permanente, un motor de inducción de jaula de ardilla induce una corriente en su rotor, creando un electroimán. Como muestra el gráfico adjunto, cuando la corriente fluye en un devanado del estator, el campo electromagnético creado corta las barras del rotor más cercanas. © Siemens Industry, Inc. 2016 Página 2-23
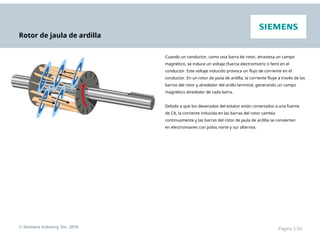
- 50. Rotor de jaula de ardilla Cuando un conductor, como una barra de rotor, atraviesa un campo magnético, se induce un voltaje (fuerza electromotriz o fem) en el conductor. Este voltaje inducido provoca un flujo de corriente en el conductor. En un rotor de jaula de ardilla, la corriente fluye a través de las barras del rotor y alrededor del anillo terminal, generando un campo magnético alrededor de cada barra. Debido a que los devanados del estator están conectados a una fuente de CA, la corriente inducida en las barras del rotor cambia continuamente y las barras del rotor de jaula de ardilla se convierten en electroimanes con polos norte y sur alternos. © Siemens Industry, Inc. 2016 Página 2-24
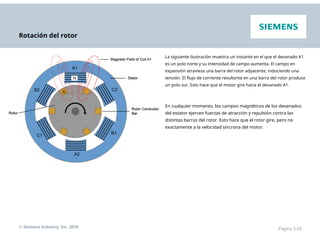
- 51. Rotación del rotor La siguiente ilustración muestra un instante en el que el devanado A1 es un polo norte y su intensidad de campo aumenta. El campo en expansión atraviesa una barra del rotor adyacente, induciendo una tensión. El flujo de corriente resultante en una barra del rotor produce un polo sur. Esto hace que el motor gire hacia el devanado A1. En cualquier momento, los campos magnéticos de los devanados del estator ejercen fuerzas de atracción y repulsión contra las distintas barras del rotor. Esto hace que el rotor gire, pero no exactamente a la velocidad síncrona del motor. © Siemens Industry, Inc. 2016 Página 2-25
- 52. Deslizar En un motor de inducción trifásico, el campo magnético giratorio debe girar más rápido que el rotor para inducir corriente en este. Al aplicar potencia al motor por primera vez con el rotor parado, esta diferencia de velocidad es máxima y se induce una gran cantidad de corriente en el rotor. Después de que el motor haya funcionado el tiempo suficiente para alcanzar la velocidad de operación, la diferencia entre la velocidad síncrona del campo magnético giratorio y la velocidad del rotor es mucho menor. Esta diferencia de velocidad se denomina deslizamiento. El deslizamiento es necesario para generar par. Este también depende de la carga. Un aumento de la carga ralentiza el rotor, lo que aumenta el deslizamiento. Una disminución de la carga acelera el rotor, lo que disminuye el deslizamiento. El deslizamiento se expresa como un porcentaje y se puede calcular utilizando la fórmula que se muestra en la ilustración adjunta. Por ejemplo, un motor de cuatro polos que funciona a 60 Hz tiene una velocidad síncrona (NS) de 1800 RPM. Si su velocidad de rotor (NR) a plena carga es de 1765 RPM, entonces su deslizamiento a plena carga es del 1,9%. © Siemens Industry, Inc. 2016 Página 2-26
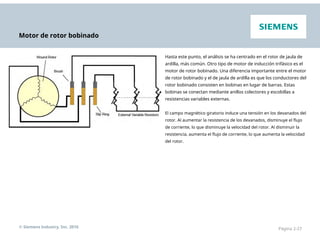
- 53. Motor de rotor bobinado Hasta este punto, el análisis se ha centrado en el rotor de jaula de ardilla, más común. Otro tipo de motor de inducción trifásico es el motor de rotor bobinado. Una diferencia importante entre el motor de rotor bobinado y el de jaula de ardilla es que los conductores del rotor bobinado consisten en bobinas en lugar de barras. Estas bobinas se conectan mediante anillos colectores y escobillas a resistencias variables externas. El campo magnético giratorio induce una tensión en los devanados del rotor. Al aumentar la resistencia de los devanados, disminuye el flujo de corriente, lo que disminuye la velocidad del rotor. Al disminuir la resistencia, aumenta el flujo de corriente, lo que aumenta la velocidad del rotor. © Siemens Industry, Inc. 2016 Página 2-27
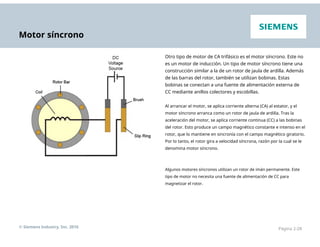
- 54. Motor síncrono Otro tipo de motor de CA trifásico es el motor síncrono. Este no es un motor de inducción. Un tipo de motor síncrono tiene una construcción similar a la de un rotor de jaula de ardilla. Además de las barras del rotor, también se utilizan bobinas. Estas bobinas se conectan a una fuente de alimentación externa de CC mediante anillos colectores y escobillas. Al arrancar el motor, se aplica corriente alterna (CA) al estator, y el motor síncrono arranca como un rotor de jaula de ardilla. Tras la aceleración del motor, se aplica corriente continua (CC) a las bobinas del rotor. Esto produce un campo magnético constante e intenso en el rotor, que lo mantiene en sincronía con el campo magnético giratorio. Por lo tanto, el rotor gira a velocidad síncrona, razón por la cual se le denomina motor síncrono. Algunos motores síncronos utilizan un rotor de imán permanente. Este tipo de motor no necesita una fuente de alimentación de CC para magnetizar el rotor. © Siemens Industry, Inc. 2016 Página 2-28
- 55. Aprendizaje en el aula Los estudios indican que cuando los estudiantes practican lo que han aprendido en un aula, retienen el 75% de la lección, en comparación con los entornos de sólo conferencias donde retienen solo el 20% de la lección. Nuestro contenido de aprendizaje es revisado y aprobado por expertos técnicos y operativos de Siemens para garantizar el cumplimiento de los más altos estándares de la industria, la salud, la seguridad y el medio ambiente. Las estaciones de trabajo de simulación de Siemens ofrecen una plataforma segura y sin riesgos para la capacitación laboral, las pruebas de proyectos, la ingeniería de diseño y la resolución de problemas. Combinamos tecnología y experiencia en la industria para ofrecer programas de aprendizaje personalizados y altamente efectivos. • Cursos orientados al empleo • Aprendizaje práctico y desarrollo de habilidades • Enfoque de capacitación a nivel de sistema • Amplio horario de clases • Diversas opciones de medios y duración del curso. • Cursos presenciales y personalizados • Múltiples ubicaciones de centros de capacitación • Servicios y productos empaquetados Para obtener información adicional:www.usa.siemens.com/sitrain Página 2-29 © Siemens Industry, Inc. 2016
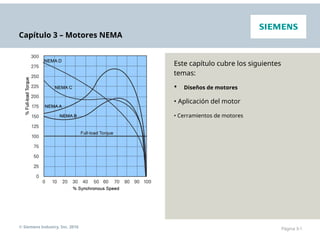
- 56. Capítulo 3 – Motores NEMA Este capítulo cubre los siguientes temas: • Diseños de motores • Aplicación del motor • Cerramientos de motores © Siemens Industry, Inc. 2016 Página 3-1
- 57. Placa de identificación del motor La placa de características de un motor proporciona la información necesaria para su correcta aplicación. Por ejemplo, el gráfico adjunto muestra la placa de características de un Siemens GP100A. Motor trifásico (3 PH) NEMA de 3 caballos de fuerza (HP). Este motor es NEMA, pero también está clasificado para funcionar en Europa, por lo que tiene clasificaciones para Norteamérica (en rojo) y Europa (en azul). Las clasificaciones para Norteamérica también se aplican en otras áreas donde la frecuencia de la línea eléctrica es de 60 Hz, y las clasificaciones para Europa también se aplican en otras áreas donde la frecuencia de la línea eléctrica es de 50 Hz. Tenga en cuenta que, para ambos conjuntos de potencias nominales, este motor tiene conexiones de baja y alta tensión. Por ejemplo, para aplicaciones de 60 Hz, este motor puede funcionar a 208 VCA o 230 VCA con las conexiones de baja tensión, o a 460 VCA con las conexiones de alta tensión. Hay tres clasificaciones de corriente de carga completa (A) para aplicaciones de 60 Hz. Para aplicaciones de 208 VCA, la corriente nominal es de 8,5 A, para aplicaciones de 230 VCA, la corriente nominal es de 8,0 A y para aplicaciones de 460 VCA, la corriente nominal es de 4,0 A. Para aplicaciones de 50 Hz, debido a que solo hay dos clasificaciones de voltaje, solo se necesitan dos clasificaciones de corriente. © Siemens Industry, Inc. 2016 Página 3-2
- 58. Velocidad base La velocidad base es la velocidad en revoluciones por minuto (RPM) de un motor de CA operado a la tensión y frecuencia nominales a plena carga. Si el motor opera a una carga inferior a la plena carga, la velocidad de salida será ligeramente superior a la velocidad base. Este motor tiene una velocidad base de 1770 RPM a 60 Hz y 1475 RPM a 50 Hz. Debido a que es un motor de 4 polos, su velocidad sincrónica a 60 Hz es 1800 RPM y su velocidad sincrónica a 50 Hz es 1500 RPM. © Siemens Industry, Inc. 2016 Página 3-3
- 59. Factor de servicio El factor de servicio es un número que se multiplica por la potencia nominal del motor para determinar la potencia a la que este puede funcionar durante periodos cortos. Por lo tanto, un motor diseñado para funcionar a la potencia nominal o inferior tiene un factor de servicio de 1.0. Algunos motores están diseñados para un factor de servicio superior a 1.0, por lo que, en ocasiones, pueden superar su potencia nominal. Tenga en cuenta que cualquier motor que funcione continuamente por encima de su potencia nominal tendrá una vida útil reducida. Este motor tiene un factor de servicio de 1,15 para aplicaciones de 60 Hz. Un motor con este factor de servicio puede funcionar con un 15 % más de potencia nominal. Por lo tanto, este motor de 5 HP puede funcionar a 3,45 HP. Para aplicaciones de 50 Hz, este motor tiene un factor de servicio de 1,0, por lo que no debe funcionar por encima de 2,238 kW. El factor de servicio de este motor también es 1,0 cuando está controlado por un variador de frecuencia (VFD). © Siemens Industry, Inc. 2016 Página 3-4
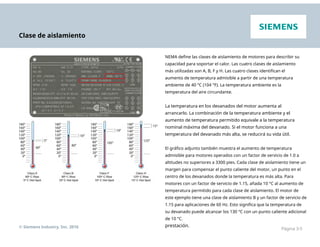
- 60. Clase de aislamiento NEMA define las clases de aislamiento de motores para describir su capacidad para soportar el calor. Las cuatro clases de aislamiento más utilizadas son A, B, F y H. Las cuatro clases identifican el aumento de temperatura admisible a partir de una temperatura ambiente de 40 °C (104 °F). La temperatura ambiente es la temperatura del aire circundante. La temperatura en los devanados del motor aumenta al arrancarlo. La combinación de la temperatura ambiente y el aumento de temperatura permitido equivale a la temperatura nominal máxima del devanado. Si el motor funciona a una temperatura del devanado más alta, se reducirá su vida útil. El gráfico adjunto también muestra el aumento de temperatura admisible para motores operados con un factor de servicio de 1.0 a altitudes no superiores a 3300 pies. Cada clase de aislamiento tiene un margen para compensar el punto caliente del motor, un punto en el centro de los devanados donde la temperatura es más alta. Para motores con un factor de servicio de 1.15, añada 10 °C al aumento de temperatura permitido para cada clase de aislamiento. El motor de este ejemplo tiene una clase de aislamiento B y un factor de servicio de 1.15 para aplicaciones de 60 Hz. Esto significa que la temperatura de su devanado puede alcanzar los 130 °C con un punto caliente adicional de 10 °C. © Siemens Industry, Inc. 2016 prestación. Página 3-5
- 61. Eficiencia del motor La eficiencia de los motores es un tema de creciente importancia, especialmente para los motores de CA. Su importancia radica en su amplio uso y en que representan un porcentaje significativo de la energía consumida en instalaciones industriales. La eficiencia del motor es el porcentaje de la energía suministrada al motor que se convierte en energía mecánica en su eje cuando este funciona continuamente a plena carga con la tensión nominal aplicada. Dado que la eficiencia del motor puede variar entre motores del mismo diseño, el porcentaje de eficiencia nominal NEMA que figura en la placa de características representa la eficiencia promedio de un gran número de motores del mismo tipo. El motor de este ejemplo tiene una eficiencia nominal NEMA del 90,2 %. NEMA también estableció un NEMA Premium®Programa de motores de eficiencia energética que ayuda a usuarios y fabricantes de equipos originales (OEM) a seleccionar motores de alta eficiencia. Los motores que cumplen los requisitos cuentan con la certificación NEMA Premium. ®logo. La ley estadounidense ahora exige que la mayoría de los motores de inducción trifásicos utilizados en Estados Unidos cumplan o superen los niveles de eficiencia NEMA Premium. © Siemens Industry, Inc. 2016 Página 3-6
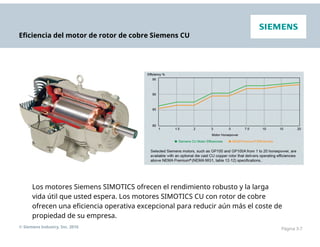
- 62. Eficiencia del motor de rotor de cobre Siemens CU Los motores Siemens SIMOTICS ofrecen el rendimiento robusto y la larga vida útil que usted espera. Los motores SIMOTICS CU con rotor de cobre ofrecen una eficiencia operativa excepcional para reducir aún más el coste de propiedad de su empresa. © Siemens Industry, Inc. 2016 Página 3-7
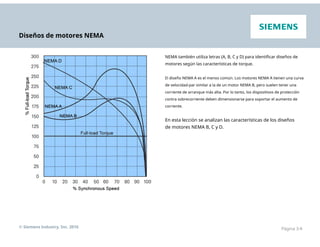
- 63. Diseños de motores NEMA NEMA también utiliza letras (A, B, C y D) para identificar diseños de motores según las características de torque. El diseño NEMA A es el menos común. Los motores NEMA A tienen una curva de velocidad-par similar a la de un motor NEMA B, pero suelen tener una corriente de arranque más alta. Por lo tanto, los dispositivos de protección contra sobrecorriente deben dimensionarse para soportar el aumento de corriente. En esta lección se analizan las características de los diseños de motores NEMA B, C y D. © Siemens Industry, Inc. 2016 Página 3-8
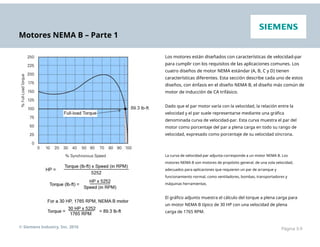
- 64. Motores NEMA B – Parte 1 Los motores están diseñados con características de velocidad-par para cumplir con los requisitos de las aplicaciones comunes. Los cuatro diseños de motor NEMA estándar (A, B, C y D) tienen características diferentes. Esta sección describe cada uno de estos diseños, con énfasis en el diseño NEMA B, el diseño más común de motor de inducción de CA trifásico. Dado que el par motor varía con la velocidad, la relación entre la velocidad y el par suele representarse mediante una gráfica denominada curva de velocidad-par. Esta curva muestra el par del motor como porcentaje del par a plena carga en todo su rango de velocidad, expresado como porcentaje de su velocidad síncrona. La curva de velocidad-par adjunta corresponde a un motor NEMA B. Los motores NEMA B son motores de propósito general, de una sola velocidad, adecuados para aplicaciones que requieren un par de arranque y funcionamiento normal, como ventiladores, bombas, transportadores y máquinas herramientas. El gráfico adjunto muestra el cálculo del torque a plena carga para un motor NEMA B típico de 30 HP con una velocidad de plena carga de 1765 RPM. © Siemens Industry, Inc. 2016 Página 3-9
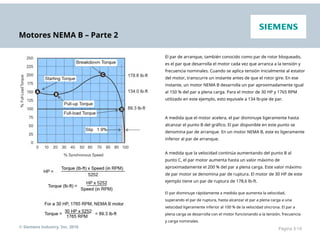
- 65. Motores NEMA B – Parte 2 El par de arranque, también conocido como par de rotor bloqueado, es el par que desarrolla el motor cada vez que arranca a la tensión y frecuencia nominales. Cuando se aplica tensión inicialmente al estator del motor, transcurre un instante antes de que el rotor gire. En ese instante, un motor NEMA B desarrolla un par aproximadamente igual al 150 % del par a plena carga. Para el motor de 30 HP y 1765 RPM utilizado en este ejemplo, esto equivale a 134 lb-pie de par. A medida que el motor acelera, el par disminuye ligeramente hasta alcanzar el punto B del gráfico. El par disponible en este punto se denomina par de arranque. En un motor NEMA B, este es ligeramente inferior al par de arranque. A medida que la velocidad continúa aumentando del punto B al punto C, el par motor aumenta hasta un valor máximo de aproximadamente el 200 % del par a plena carga. Este valor máximo de par motor se denomina par de ruptura. El motor de 30 HP de este ejemplo tiene un par de ruptura de 178,6 lb-ft. El par disminuye rápidamente a medida que aumenta la velocidad, superando el par de ruptura, hasta alcanzar el par a plena carga a una velocidad ligeramente inferior al 100 % de la velocidad síncrona. El par a plena carga se desarrolla con el motor funcionando a la tensión, frecuencia y carga nominales. © Siemens Industry, Inc. 2016 Página 3-10
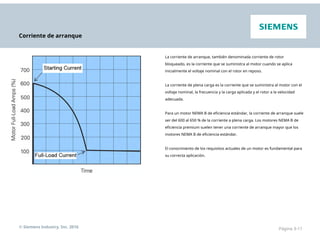
- 66. Corriente de arranque La corriente de arranque, también denominada corriente de rotor bloqueado, es la corriente que se suministra al motor cuando se aplica inicialmente el voltaje nominal con el rotor en reposo. La corriente de plena carga es la corriente que se suministra al motor con el voltaje nominal, la frecuencia y la carga aplicada y el rotor a la velocidad adecuada. Para un motor NEMA B de eficiencia estándar, la corriente de arranque suele ser del 600 al 650 % de la corriente a plena carga. Los motores NEMA B de eficiencia premium suelen tener una corriente de arranque mayor que los motores NEMA B de eficiencia estándar. El conocimiento de los requisitos actuales de un motor es fundamental para su correcta aplicación. © Siemens Industry, Inc. 2016 Página 3-11
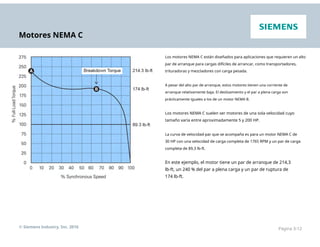
- 67. Motores NEMA C Los motores NEMA C están diseñados para aplicaciones que requieren un alto par de arranque para cargas difíciles de arrancar, como transportadores, trituradoras y mezcladores con carga pesada. A pesar del alto par de arranque, estos motores tienen una corriente de arranque relativamente baja. El deslizamiento y el par a plena carga son prácticamente iguales a los de un motor NEMA B. Los motores NEMA C suelen ser motores de una sola velocidad cuyo tamaño varía entre aproximadamente 5 y 200 HP. La curva de velocidad-par que se acompaña es para un motor NEMA C de 30 HP con una velocidad de carga completa de 1765 RPM y un par de carga completa de 89,3 lb-ft. En este ejemplo, el motor tiene un par de arranque de 214,3 lb-ft, un 240 % del par a plena carga y un par de ruptura de 174 lb-ft. © Siemens Industry, Inc. 2016 Página 3-12
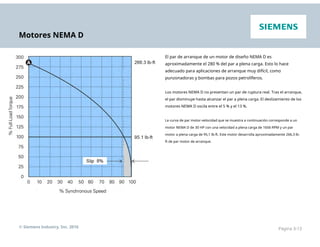
- 68. Motores NEMA D El par de arranque de un motor de diseño NEMA D es aproximadamente el 280 % del par a plena carga. Esto lo hace adecuado para aplicaciones de arranque muy difícil, como punzonadoras y bombas para pozos petrolíferos. Los motores NEMA D no presentan un par de ruptura real. Tras el arranque, el par disminuye hasta alcanzar el par a plena carga. El deslizamiento de los motores NEMA D oscila entre el 5 % y el 13 %. La curva de par motor-velocidad que se muestra a continuación corresponde a un motor NEMA D de 30 HP con una velocidad a plena carga de 1656 RPM y un par motor a plena carga de 95,1 lb-ft. Este motor desarrolla aproximadamente 266,3 lb- ft de par motor de arranque. © Siemens Industry, Inc. 2016 Página 3-13
- 69. Capítulo 3 – Motores NEMA Este capítulo cubre los siguientes temas: • Diseños de motores • Aplicación del motor • Cerramientos de motores © Siemens Industry, Inc. 2016 Página 3-14
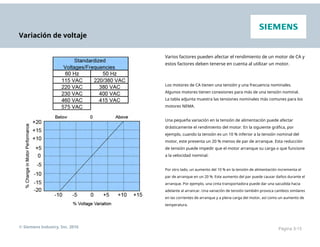
- 70. Variación de voltaje Varios factores pueden afectar el rendimiento de un motor de CA y estos factores deben tenerse en cuenta al utilizar un motor. Los motores de CA tienen una tensión y una frecuencia nominales. Algunos motores tienen conexiones para más de una tensión nominal. La tabla adjunta muestra las tensiones nominales más comunes para los motores NEMA. Una pequeña variación en la tensión de alimentación puede afectar drásticamente el rendimiento del motor. En la siguiente gráfica, por ejemplo, cuando la tensión es un 10 % inferior a la tensión nominal del motor, este presenta un 20 % menos de par de arranque. Esta reducción de tensión puede impedir que el motor arranque su carga o que funcione a la velocidad nominal. Por otro lado, un aumento del 10 % en la tensión de alimentación incrementa el par de arranque en un 20 %. Este aumento del par puede causar daños durante el arranque. Por ejemplo, una cinta transportadora puede dar una sacudida hacia adelante al arrancar. Una variación de tensión también provoca cambios similares en las corrientes de arranque y a plena carga del motor, así como un aumento de temperatura. © Siemens Industry, Inc. 2016 Página 3-15
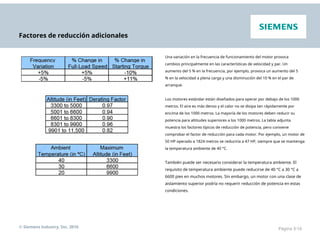
- 71. Factores de reducción adicionales Una variación en la frecuencia de funcionamiento del motor provoca cambios principalmente en las características de velocidad y par. Un aumento del 5 % en la frecuencia, por ejemplo, provoca un aumento del 5 % en la velocidad a plena carga y una disminución del 10 % en el par de arranque. Los motores estándar están diseñados para operar por debajo de los 1000 metros. El aire es más denso y el calor no se disipa tan rápidamente por encima de los 1000 metros. La mayoría de los motores deben reducir su potencia para altitudes superiores a los 1000 metros. La tabla adjunta muestra los factores típicos de reducción de potencia, pero conviene comprobar el factor de reducción para cada motor. Por ejemplo, un motor de 50 HP operado a 1824 metros se reduciría a 47 HP, siempre que se mantenga la temperatura ambiente de 40 °C. También puede ser necesario considerar la temperatura ambiente. El requisito de temperatura ambiente puede reducirse de 40 °C a 30 °C a 6600 pies en muchos motores. Sin embargo, un motor con una clase de aislamiento superior podría no requerir reducción de potencia en estas condiciones. © Siemens Industry, Inc. 2016 Página 3-16
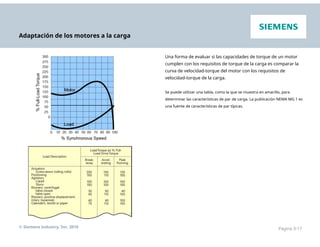
- 72. Adaptación de los motores a la carga Una forma de evaluar si las capacidades de torque de un motor cumplen con los requisitos de torque de la carga es comparar la curva de velocidad-torque del motor con los requisitos de velocidad-torque de la carga. Se puede utilizar una tabla, como la que se muestra en amarillo, para determinar las características de par de carga. La publicación NEMA MG 1 es una fuente de características de par típicas. © Siemens Industry, Inc. 2016 Página 3-17
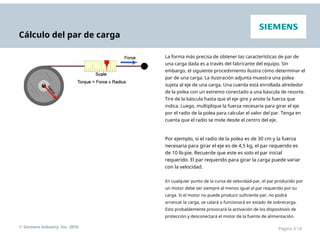
- 73. Cálculo del par de carga La forma más precisa de obtener las características de par de una carga dada es a través del fabricante del equipo. Sin embargo, el siguiente procedimiento ilustra cómo determinar el par de una carga. La ilustración adjunta muestra una polea sujeta al eje de una carga. Una cuerda está enrollada alrededor de la polea con un extremo conectado a una báscula de resorte. Tire de la báscula hasta que el eje gire y anote la fuerza que indica. Luego, multiplique la fuerza necesaria para girar el eje por el radio de la polea para calcular el valor del par. Tenga en cuenta que el radio se mide desde el centro del eje. Por ejemplo, si el radio de la polea es de 30 cm y la fuerza necesaria para girar el eje es de 4,5 kg, el par requerido es de 10 lb-pie. Recuerde que este es solo el par inicial requerido. El par requerido para girar la carga puede variar con la velocidad. En cualquier punto de la curva de velocidad-par, el par producido por un motor debe ser siempre al menos igual al par requerido por su carga. Si el motor no puede producir suficiente par, no podrá arrancar la carga, se calará o funcionará en estado de sobrecarga. Esto probablemente provocará la activación de los dispositivos de protección y desconectará el motor de la fuente de alimentación. © Siemens Industry, Inc. 2016 Página 3-18
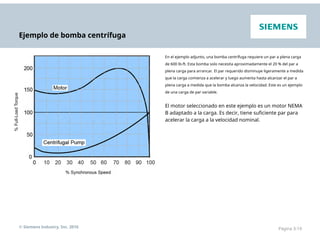
- 74. Ejemplo de bomba centrífuga En el ejemplo adjunto, una bomba centrífuga requiere un par a plena carga de 600 lb-ft. Esta bomba solo necesita aproximadamente el 20 % del par a plena carga para arrancar. El par requerido disminuye ligeramente a medida que la carga comienza a acelerar y luego aumenta hasta alcanzar el par a plena carga a medida que la bomba alcanza la velocidad. Este es un ejemplo de una carga de par variable. El motor seleccionado en este ejemplo es un motor NEMA B adaptado a la carga. Es decir, tiene suficiente par para acelerar la carga a la velocidad nominal. © Siemens Industry, Inc. 2016 Página 3-19
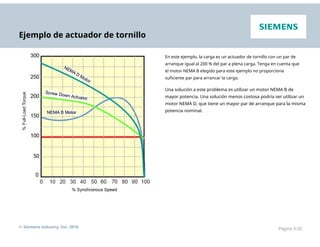
- 75. Ejemplo de actuador de tornillo En este ejemplo, la carga es un actuador de tornillo con un par de arranque igual al 200 % del par a plena carga. Tenga en cuenta que el motor NEMA B elegido para este ejemplo no proporciona suficiente par para arrancar la carga. Una solución a este problema es utilizar un motor NEMA B de mayor potencia. Una solución menos costosa podría ser utilizar un motor NEMA D, que tiene un mayor par de arranque para la misma potencia nominal. © Siemens Industry, Inc. 2016 Página 3-20
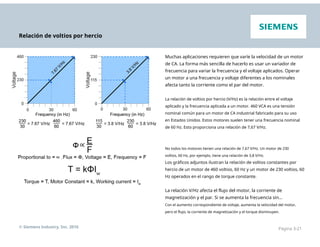
- 76. Relación de voltios por hercio Muchas aplicaciones requieren que varíe la velocidad de un motor de CA. La forma más sencilla de hacerlo es usar un variador de frecuencia para variar la frecuencia y el voltaje aplicados. Operar un motor a una frecuencia y voltaje diferentes a los nominales afecta tanto la corriente como el par del motor. La relación de voltios por hercio (V/Hz) es la relación entre el voltaje aplicado y la frecuencia aplicada a un motor. 460 VCA es una tensión nominal común para un motor de CA industrial fabricado para su uso en Estados Unidos. Estos motores suelen tener una frecuencia nominal de 60 Hz. Esto proporciona una relación de 7,67 V/Hz. No todos los motores tienen una relación de 7,67 V/Hz. Un motor de 230 voltios, 60 Hz, por ejemplo, tiene una relación de 3,8 V/Hz. Los gráficos adjuntos ilustran la relación de voltios constantes por hercio de un motor de 460 voltios, 60 Hz y un motor de 230 voltios, 60 Hz operados en el rango de torque constante. La relación V/Hz afecta el flujo del motor, la corriente de magnetización y el par. Si se aumenta la frecuencia sin... Con el aumento correspondiente de voltaje, aumenta la velocidad del motor, pero el flujo, la corriente de magnetización y el torque disminuyen. © Siemens Industry, Inc. 2016 Página 3-21
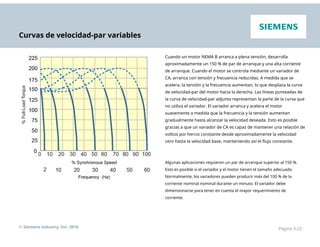
- 77. Curvas de velocidad-par variables Cuando un motor NEMA B arranca a plena tensión, desarrolla aproximadamente un 150 % de par de arranque y una alta corriente de arranque. Cuando el motor se controla mediante un variador de CA, arranca con tensión y frecuencia reducidas. A medida que se acelera, la tensión y la frecuencia aumentan, lo que desplaza la curva de velocidad-par del motor hacia la derecha. Las líneas punteadas de la curva de velocidad-par adjunta representan la parte de la curva que no utiliza el variador. El variador arranca y acelera el motor suavemente a medida que la frecuencia y la tensión aumentan gradualmente hasta alcanzar la velocidad deseada. Esto es posible gracias a que un variador de CA es capaz de mantener una relación de voltios por hercio constante desde aproximadamente la velocidad cero hasta la velocidad base, manteniendo así el flujo constante. Algunas aplicaciones requieren un par de arranque superior al 150 %. Esto es posible si el variador y el motor tienen el tamaño adecuado. Normalmente, los variadores pueden producir más del 100 % de la corriente nominal nominal durante un minuto. El variador debe dimensionarse para tener en cuenta el mayor requerimiento de corriente. © Siemens Industry, Inc. 2016 Página 3-22
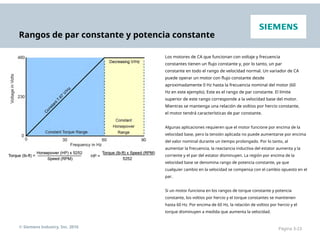
- 78. Rangos de par constante y potencia constante Los motores de CA que funcionan con voltaje y frecuencia constantes tienen un flujo constante y, por lo tanto, un par constante en todo el rango de velocidad normal. Un variador de CA puede operar un motor con flujo constante desde aproximadamente 0 Hz hasta la frecuencia nominal del motor (60 Hz en este ejemplo). Este es el rango de par constante. El límite superior de este rango corresponde a la velocidad base del motor. Mientras se mantenga una relación de voltios por hercio constante, el motor tendrá características de par constante. Algunas aplicaciones requieren que el motor funcione por encima de la velocidad base, pero la tensión aplicada no puede aumentarse por encima del valor nominal durante un tiempo prolongado. Por lo tanto, al aumentar la frecuencia, la reactancia inductiva del estator aumenta y la corriente y el par del estator disminuyen. La región por encima de la velocidad base se denomina rango de potencia constante, ya que cualquier cambio en la velocidad se compensa con el cambio opuesto en el par. Si un motor funciona en los rangos de torque constante y potencia constante, los voltios por hercio y el torque constantes se mantienen hasta 60 Hz. Por encima de 60 Hz, la relación de voltios por hercio y el torque disminuyen a medida que aumenta la velocidad. © Siemens Industry, Inc. 2016 Página 3-23
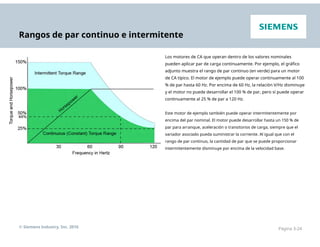
- 79. Rangos de par continuo e intermitente Los motores de CA que operan dentro de los valores nominales pueden aplicar par de carga continuamente. Por ejemplo, el gráfico adjunto muestra el rango de par continuo (en verde) para un motor de CA típico. El motor de ejemplo puede operar continuamente al 100 % de par hasta 60 Hz. Por encima de 60 Hz, la relación V/Hz disminuye y el motor no puede desarrollar el 100 % de par, pero sí puede operar continuamente al 25 % de par a 120 Hz. Este motor de ejemplo también puede operar intermitentemente por encima del par nominal. El motor puede desarrollar hasta un 150 % de par para arranque, aceleración o transitorios de carga, siempre que el variador asociado pueda suministrar la corriente. Al igual que con el rango de par continuo, la cantidad de par que se puede proporcionar intermitentemente disminuye por encima de la velocidad base. © Siemens Industry, Inc. 2016 Página 3-24
- 80. Videoteca instructiva Esta extensa biblioteca de videos cortos fue creada por nuestros expertos en formación para satisfacer las necesidades reales de la industria, considerando todos los niveles de experiencia. Al ofrecer instrucciones prácticas a la carta en fragmentos fáciles de entender, la Videoteca de Instrucciones ayuda a mantener los conocimientos y habilidades clave de la industria y la fabricación, desarrollados durante los cursos de formación impartidos por instructores. Los videos suelen tener una duración de tres minutos y están disponibles fácilmente desde cualquier ordenador o dispositivo móvil con acceso a internet. El aprendizaje comienza una vez que haya completado el registro. • Comienza tu suscripción cuando quieras. Vídeos disponibles 24/7/365. • Compre suscripciones de uno, tres, seis o doce meses por tecnología o en un paquete completo. • Aproveche nuestra opción más flexible: acceso máximo con una suscripción completa por un año. Para obtener información adicional:www.usa.siemens.com/sitrain © Siemens Industry, Inc. 2016 Página 3-25
- 81. Capítulo 3 – Motores NEMA Este capítulo cubre los siguientes temas: • Diseños de motores • Aplicación del motor • Cerramientos de motores © Siemens Industry, Inc. 2016 Página 3-26
- 82. Recinto abierto a prueba de goteo La carcasa de un motor no solo mantiene unidos sus componentes, sino que también protege los componentes internos de la humedad y la contención. El grado de protección depende del tipo de carcasa. Además, el tipo de carcasa afecta la refrigeración del motor. Existen dos grandes categorías de carcasas: abiertas y totalmente cerradas. Las carcasas abiertas permiten que el aire de refrigeración fluya a través del motor. Un tipo de carcasa abierta es la carcasa a prueba de goteo (ODP). Esta carcasa cuenta con respiraderos que permiten el flujo de aire. Las aspas del ventilador, fijadas al rotor, impulsan el aire a través del motor cuando este gira. Los respiraderos están ubicados de forma que los líquidos y sólidos que caen desde arriba en ángulos de hasta 15° con respecto a la vertical no puedan entrar en el interior del motor cuando este está montado sobre una superficie horizontal. Cuando el motor se monta en una superficie vertical, como una pared o un panel, podría requerirse una cubierta especial. Las carcasas ODP deben utilizarse en entornos libres de contaminantes. © Siemens Industry, Inc. 2016 Página 3-27
- 83. Recinto totalmente cerrado sin ventilación En algunas aplicaciones, el aire que rodea el motor contiene elementos corrosivos o dañinos que pueden dañar sus componentes internos. Una carcasa de motor totalmente cerrada y sin ventilación (TENV) limita el flujo de aire hacia el motor, pero no es hermética. Sin embargo, un sello en el punto donde el eje atraviesa la carcasa impide que entre agua, polvo y otras partículas extrañas a través del eje. La mayoría de los motores TENV son de potencia fraccionaria. Sin embargo, los motores TENV de potencia integral se utilizan para aplicaciones especiales. La ausencia de aberturas de ventilación implica que todo el calor del interior del motor debe disiparse a través de la carcasa por conducción. Estos motores TENV de mayor potencia tienen una carcasa con numerosas nervaduras para disipar el calor con mayor rapidez. Los motores TENV pueden utilizarse tanto en interiores como en exteriores. © Siemens Industry, Inc. 2016 Página 3-28
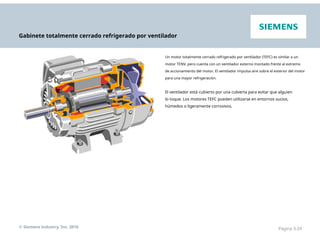
- 84. Gabinete totalmente cerrado refrigerado por ventilador Un motor totalmente cerrado refrigerado por ventilador (TEFC) es similar a un motor TENV, pero cuenta con un ventilador externo montado frente al extremo de accionamiento del motor. El ventilador impulsa aire sobre el exterior del motor para una mayor refrigeración. El ventilador está cubierto por una cubierta para evitar que alguien lo toque. Los motores TEFC pueden utilizarse en entornos sucios, húmedos o ligeramente corrosivos. © Siemens Industry, Inc. 2016 Página 3-29
- 85. Caja a prueba de explosiones Un motor a prueba de explosiones (XP) es similar en apariencia a un motor TEFC, pero tiene una serie de características necesarias para un funcionamiento seguro en aplicaciones peligrosas, como las que se encuentran en el procesamiento químico, la minería, la fundición, la pulpa y el papel, la gestión de residuos y las industrias petroquímicas. En los EE. UU., la aplicación de motores en lugares peligrosos está sujeta a laCódigo Eléctrico Nacional® así como los estándares establecidos por Underwriters Laboratories y varias agencias reguladoras. Las instalaciones de División I suelen presentar materiales peligrosos en la atmósfera. Las instalaciones de División II pueden presentar materiales peligrosos en la atmósfera en condiciones anormales. Las ubicaciones definidas como peligrosas se definen con mayor precisión según la clase y el grupo de riesgo. Por ejemplo, la Clase I, Grupos A a D, presenta gases o vapores. La Clase II, Grupos E, F y G, presenta polvo inflamable, como coque o polvo de grano. La Clase III no se divide en grupos. Esta clase incluye fibras y pelusas inflamables. © Siemens Industry, Inc. 2016 Página 3-30
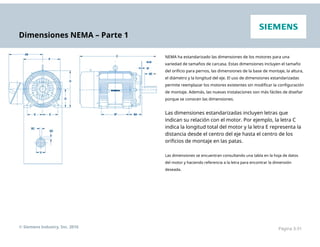
- 86. Dimensiones NEMA – Parte 1 NEMA ha estandarizado las dimensiones de los motores para una variedad de tamaños de carcasa. Estas dimensiones incluyen el tamaño del orificio para pernos, las dimensiones de la base de montaje, la altura, el diámetro y la longitud del eje. El uso de dimensiones estandarizadas permite reemplazar los motores existentes sin modificar la configuración de montaje. Además, las nuevas instalaciones son más fáciles de diseñar porque se conocen las dimensiones. Las dimensiones estandarizadas incluyen letras que indican su relación con el motor. Por ejemplo, la letra C indica la longitud total del motor y la letra E representa la distancia desde el centro del eje hasta el centro de los orificios de montaje en las patas. Las dimensiones se encuentran consultando una tabla en la hoja de datos del motor y haciendo referencia a la letra para encontrar la dimensión deseada. © Siemens Industry, Inc. 2016 Página 3-31
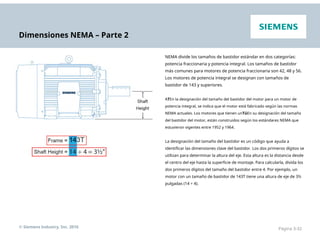
- 87. Dimensiones NEMA – Parte 2 NEMA divide los tamaños de bastidor estándar en dos categorías: potencia fraccionaria y potencia integral. Los tamaños de bastidor más comunes para motores de potencia fraccionaria son 42, 48 y 56. Los motores de potencia integral se designan con tamaños de bastidor de 143 y superiores. ATEn la designación del tamaño del bastidor del motor para un motor de potencia integral, se indica que el motor está fabricado según las normas NEMA actuales. Los motores que tienen unTúEn su designación del tamaño del bastidor del motor, están construidos según los estándares NEMA que estuvieron vigentes entre 1952 y 1964. La designación del tamaño del bastidor es un código que ayuda a identificar las dimensiones clave del bastidor. Los dos primeros dígitos se utilizan para determinar la altura del eje. Esta altura es la distancia desde el centro del eje hasta la superficie de montaje. Para calcularla, divida los dos primeros dígitos del tamaño del bastidor entre 4. Por ejemplo, un motor con un tamaño de bastidor de 143T tiene una altura de eje de 3½ pulgadas (14 ÷ 4). © Siemens Industry, Inc. 2016 Página 3-32
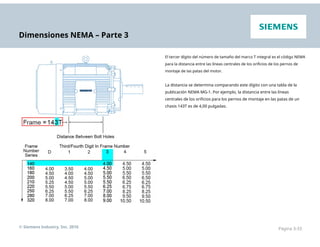
- 88. Dimensiones NEMA – Parte 3 El tercer dígito del número de tamaño del marco T integral es el código NEMA para la distancia entre las líneas centrales de los orificios de los pernos de montaje de las patas del motor. La distancia se determina comparando este dígito con una tabla de la publicación NEMA MG-1. Por ejemplo, la distancia entre las líneas centrales de los orificios para los pernos de montaje en las patas de un chasis 143T es de 4,00 pulgadas. © Siemens Industry, Inc. 2016 Página 3-33
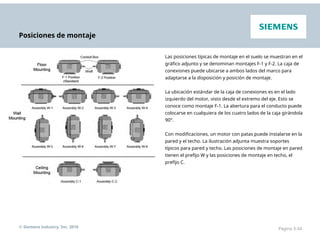
- 89. Posiciones de montaje Las posiciones típicas de montaje en el suelo se muestran en el gráfico adjunto y se denominan montajes F-1 y F-2. La caja de conexiones puede ubicarse a ambos lados del marco para adaptarse a la disposición y posición de montaje. La ubicación estándar de la caja de conexiones es en el lado izquierdo del motor, visto desde el extremo del eje. Esto se conoce como montaje F-1. La abertura para el conducto puede colocarse en cualquiera de los cuatro lados de la caja girándola 90°. Con modificaciones, un motor con patas puede instalarse en la pared y el techo. La ilustración adjunta muestra soportes típicos para pared y techo. Las posiciones de montaje en pared tienen el prefijo W y las posiciones de montaje en techo, el prefijo C. © Siemens Industry, Inc. 2016 Página 3-34
- 90. Soportes de motor con cara C y brida D Los motores se montan en los equipos de diversas maneras. Dos métodos comunes para los motores NEMA son los montajes con cara C y con brida D. La cara, o extremo, de un motor con cara C tiene orificios roscados para pernos. Los pernos para montar el motor pasan a través de los orificios de acoplamiento del equipo y se introducen en la cara del motor. Los pernos pasan a través de los orificios de la brida de un motor con brida D y dentro de los orificios roscados de acoplamiento del equipo. . © Siemens Industry, Inc. 2016 Página 3-35
- 91. Simuladores Diseñados para proporcionar una experiencia del mundo real, los simuladores de Siemens son sistemas totalmente funcionales, listos para usar y disponibles en una variedad de configuraciones. El diseño a nivel de sistema convierte a los simuladores en una herramienta invaluable para probar y depurar programas, reforzar el aprendizaje, resolver problemas en el taller y mucho más. Gracias a su diseño portátil y sus estuches rígidos, se pueden transportar fácilmente. También disponemos de sistemas personalizados. Para obtener información adicional:www.usa.siemens.com/sitrain © Siemens Industry, Inc. 2016 Página 3-36
- 92. Capítulo 4 – Siemens Motors Este capítulo cubre los siguientes temas: • Motores NEMA • Motores IEC • Motores superiores a NEMA © Siemens Industry, Inc. 2016 Página 4-1
- 93. Motores de propósito definido Para aplicaciones que requieren más de una velocidad base, MultivelocidadLos motores se ofrecen con 1 devanado para par variable. Siemensservicio del inversorLos motores están clasificados para funcionamiento continuo a una temperatura ambiente de 40 °C y a altitudes de hasta 1000 metros sobre el nivel del mar. Estos robustos motores se fabrican para aplicaciones de accionamiento de velocidad variable de servicio pesado, como ventiladores centrífugos, bombas, sopladores, mezcladoras, minería, fundición, pulpa y papel, y petroquímica. Gama completa de TEFC de SiemensVerticalLos motores P-Base son la elección correcta para aplicaciones como bombas centrífugas, bombas de turbina, torres de enfriamiento, mezcladores, pulpa y papel, petroquímica, riego, agricultura y tratamiento de aguas residuales. © Siemens Industry, Inc. 2016 Página 4-2
- 94. Motores de propósito general Los motores Siemens GP100A de propósito general, con carcasa, rodamientos, carcasa y patas atornilladas de aluminio fundido a presión de precisión, ofrecen una alta resistencia estructural gracias al análisis de elementos finitos, que distribuye estratégicamente el material dentro de cada componente para resistir los efectos de la tensión y la vibración. Los motores GP100A son más ligeros que los motores comparables con carcasa de acero laminado, pero ofrecen mayor resistencia estructural para una mayor variedad de aplicaciones industriales. Son ideales para la manipulación de materiales, bombas, compresores de ventiladores y otras aplicaciones industriales. Los motores Siemens GP100 de hierro fundido de uso general también ofrecen una alta resistencia estructural gracias al análisis de elementos finitos, que coloca estratégicamente el material dentro de cada componente para resistir los efectos de la tensión y la vibración. Se utilizan materiales resistentes a la corrosión para garantizar una larga vida útil en una amplia variedad de aplicaciones industriales. © Siemens Industry, Inc. 2016 Página 4-3
- 95. Motores de servicio severo Los motores Siemens SD100 para servicio severo son ideales para usar en procesamiento químico, minería, fundición, pulpa y papel, gestión de residuos y aplicaciones petroleras/químicas. Están disponibles con una amplia selección de modificaciones adaptadas a cada aplicación para satisfacer necesidades específicas, condiciones ambientales y requisitos de instalación. Están disponibles con eficiencia operativa NEMA Premium® de serie o con eficiencia NEMA Premium PLUS. El motor Siemens SD100 IEEE841 es el motor con diseño NEMA más avanzado. Está diseñado y fabricado para cumplir o superar los requisitos de la norma IEEE 841-2009 en cuanto a eficiencia, rendimiento, construcción, funcionamiento con velocidad variable y larga vida útil en las aplicaciones más exigentes. © Siemens Industry, Inc. 2016 Página 4-4
- 96. Motores a prueba de explosiones Los robustos motores antideflagrantes Siemens ofrecen un funcionamiento fiable incluso en condiciones extremas. Los motores antideflagrantes Siemens XP100 cuentan con certificación UL y CSA para entornos de ignición por gas y polvo, y son aptos para las clasificaciones de áreas peligrosas Clase I, Grupos C y D, Clase II, Grupos F y G, División I. También están disponibles para su uso en plataformas de perforación: áreas peligrosas Clase I, Grupo D, División I. © Siemens Industry, Inc. 2016 Página 4-5
- 97. Capítulo 4 – Siemens Motors Este capítulo cubre los siguientes temas: • Motores NEMA • Motores IEC • Motores superiores a NEMA © Siemens Industry, Inc. 2016 Página 4-6
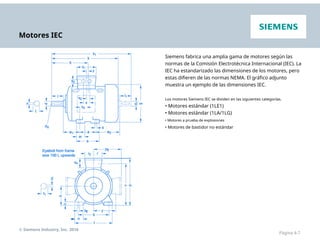
- 98. Motores IEC Siemens fabrica una amplia gama de motores según las normas de la Comisión Electrotécnica Internacional (IEC). La IEC ha estandarizado las dimensiones de los motores, pero estas difieren de las normas NEMA. El gráfico adjunto muestra un ejemplo de las dimensiones IEC. Los motores Siemens IEC se dividen en las siguientes categorías. • Motores estándar (1LE1) • Motores estándar (1LA/1LG) • Motores a prueba de explosiones • Motores de bastidor no estándar © Siemens Industry, Inc. 2016 Página 4-7
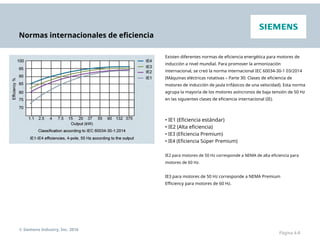
- 99. Normas internacionales de eficiencia Existen diferentes normas de eficiencia energética para motores de inducción a nivel mundial. Para promover la armonización internacional, se creó la norma internacional IEC 60034-30-1 03/2014 (Máquinas eléctricas rotativas – Parte 30: Clases de eficiencia de motores de inducción de jaula trifásicos de una velocidad). Esta norma agrupa la mayoría de los motores asíncronos de baja tensión de 50 Hz en las siguientes clases de eficiencia internacional (IE). • IE1 (Eficiencia estándar) • IE2 (Alta eficiencia) • IE3 (Eficiencia Premium) • IE4 (Eficiencia Súper Premium) IE2 para motores de 50 Hz corresponde a NEMA de alta eficiencia para motores de 60 Hz. IE3 para motores de 50 Hz corresponde a NEMA Premium Efficiency para motores de 60 Hz. © Siemens Industry, Inc. 2016 Página 4-8
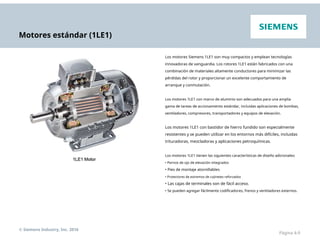
- 100. Motores estándar (1LE1) Los motores Siemens 1LE1 son muy compactos y emplean tecnologías innovadoras de vanguardia. Los rotores 1LE1 están fabricados con una combinación de materiales altamente conductores para minimizar las pérdidas del rotor y proporcionar un excelente comportamiento de arranque y conmutación. Los motores 1LE1 con marco de aluminio son adecuados para una amplia gama de tareas de accionamiento estándar, incluidas aplicaciones de bombas, ventiladores, compresores, transportadores y equipos de elevación. Los motores 1LE1 con bastidor de hierro fundido son especialmente resistentes y se pueden utilizar en los entornos más difíciles, incluidas trituradoras, mezcladoras y aplicaciones petroquímicas. Los motores 1LE1 tienen las siguientes características de diseño adicionales: • Pernos de ojo de elevación integrados • Pies de montaje atornillables • Protectores de extremos de cojinetes reforzados • Las cajas de terminales son de fácil acceso. • Se pueden agregar fácilmente codificadores, frenos y ventiladores externos. © Siemens Industry, Inc. 2016 Página 4-9
- 101. Motores estándar (1LA, 1LG) Los motores IEC estándar de Siemens están disponibles en las clases de eficiencia IE2 e IE3 para el área de validez del Reglamento (UE) 640/2009 desde 750 vatios hasta 375 kW. Estos motores también están certificados según EISA para el mercado NAFTA en las clases de Eficiencia Energética y Eficiencia Premium. Los motores IEC estándar de Siemens están disponibles con carcasa de aluminio o de hierro fundido. Entre los ejemplos de motores IEC estándar de Siemens se incluyen las series 1LA y 1LG. © Siemens Industry, Inc. 2016 Página 4-10
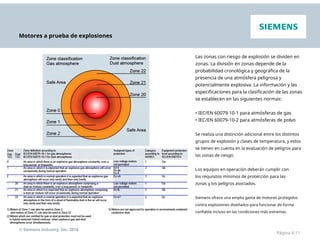
- 102. Motores a prueba de explosiones Las zonas con riesgo de explosión se dividen en zonas. La división en zonas depende de la probabilidad cronológica y geográfica de la presencia de una atmósfera peligrosa y potencialmente explosiva. La información y las especificaciones para la clasificación de las zonas se establecen en las siguientes normas: • IEC/EN 60079-10-1 para atmósferas de gas • IEC/EN 60079-10-2 para atmósferas de polvo Se realiza una distinción adicional entre los distintos grupos de explosión y clases de temperatura, y estos se tienen en cuenta en la evaluación de peligros para las zonas de riesgo. Los equipos en operación deberán cumplir con los requisitos mínimos de protección para las zonas y los peligros asociados. Siemens ofrece una amplia gama de motores protegidos contra explosiones diseñados para funcionar de forma confiable incluso en las condiciones más extremas. © Siemens Industry, Inc. 2016 Página 4-11
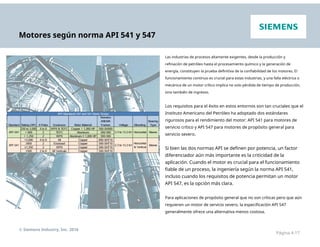
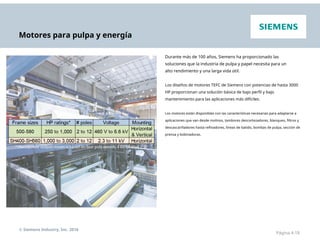
- 103. Motores no estándar de tamaño de bastidor 315 y superior Los motores no estándar de Siemens, de tamaño de carcasa 315 y superior, están disponibles como motores de baja tensión con un rango de potencia de 200 kW a 4 MW y como motores de alta tensión de hasta más de 100 MW. Esto incluye motores síncronos y de inducción para todas las tensiones y tipos de refrigeración habituales. En esta categoría se incluyen los motores de las series H- compact y Ncompact, que ofrecen una eficiencia óptima, alta densidad de potencia y diseños compactos que resultan en menores requisitos de espacio y menor peso. © Siemens Industry, Inc. 2016 Página 4-12
- 104. SITRAIN®Formación para la industria Aprendizaje en línea a su propio ritmo: programas con máxima flexibilidad para que los estudiantes puedan adaptar fácilmente los cursos a sus ocupadas agendas. Aprendizaje virtual dirigido por un instructor: clases en el aula impartidas en la comodidad de su hogar u oficina. Aprendizaje en el aula: instructores expertos y profesionales, cursos probados y estaciones de trabajo de calidad se combinan para brindar la experiencia de aula más efectiva posible en sus instalaciones o en las nuestras. Videoteca instructiva: opciones de aprendizaje rápidas, asequibles y basadas en tareas para una amplia gama de temas de automatización para capacitación o compra. Simuladores: sistemas de simulación de clase mundial disponibles para capacitación o compra. Para obtener información adicional:www.usa.siemens.com/sitrain © Siemens Industry, Inc. 2016 Página 4-13
- 105. Capítulo 4 – Siemens Motors Este capítulo cubre los siguientes temas: • Motores NEMA • Motores IEC • Motores superiores a NEMA © Siemens Industry, Inc. 2016 Página 4-14
- 106. Motores de alta tensión SIMOTICS Los motores diseñados para operar con voltajes superiores a 1000 voltios se denominan a menudo motores de alto voltaje. Los motores de alto voltaje de Siemens se comercializan colectivamente bajo la marca SIMOTICS HV. Esto incluye los siguientes tipos de motores. • Motores asíncronos desde 150 kW hasta 38 MW y tensiones hasta 13,8 kV. • Motores asíncronos de anillos rozantes de 300 kW a 8 MW • Motores síncronos desde 2,1 MW hasta más de 100 MW Cada una de estas categorías puede subdividirse a su vez. Por ejemplo, los motores asíncronos SIMOTICS HV incluyen las siguientes familias de productos. • Motores compactos • Motores modulares • Motores de alta potencia • Motores de alto par • Motores especializados © Siemens Industry, Inc. 2016 Página 4-15
- 107. Motores superiores a NEMA En EE. UU., los motores que superan la potencia nominal estándar NEMA se denominan motores superiores a NEMA. Siemens fabrica una línea completa de grandes motores de inducción de CA en nuestra planta de Norwood, Ohio. La planta de Norwood produce motores de inducción de CA horizontales de hasta 18.000 HP con tensiones de funcionamiento de 460 V a 13,2 kV. La planta también fabrica una línea completa de motores de inducción de CA verticales de hasta 6.000 HP. Los motores Siemens superiores a NEMA están disponibles en las categorías que se muestran a continuación. • Motores especiales fabricados según las normas API541 o API547 del Instituto Americano del Petróleo • Motores horizontales montados sobre patas diseñados para cumplir con el estándar IEEE 841-2009 para las industrias petrolera y química. • Motores horizontales y verticales con los siguientes tipos de envolvente • Abierto a prueba de goteo (ODP) / protegido contra la intemperie (WPI) • Refrigeración aire-aire totalmente cerrada (TEAAC) • Totalmente cerrado y refrigerado por ventilador (TEFC) • Refrigerado por agua a aire totalmente cerrado (TEWAC) • Protegido contra la intemperie II (WPII) © Siemens Industry, Inc. 2016 Página 4-16
- 108. Motores según norma API 541 y 547 Las industrias de procesos altamente exigentes, desde la producción y refinación de petróleo hasta el procesamiento químico y la generación de energía, constituyen la prueba definitiva de la confiabilidad de los motores. El funcionamiento continuo es crucial para estas industrias, y una falla eléctrica o mecánica de un motor crítico implica no solo pérdida de tiempo de producción, sino también de ingresos. Los requisitos para el éxito en estos entornos son tan cruciales que el Instituto Americano del Petróleo ha adoptado dos estándares rigurosos para el rendimiento del motor: API 541 para motores de servicio crítico y API 547 para motores de propósito general para servicio severo. Si bien las dos normas API se definen por potencia, un factor diferenciador aún más importante es la criticidad de la aplicación. Cuando el motor es crucial para el funcionamiento fiable de un proceso, la ingeniería según la norma API 541, incluso cuando los requisitos de potencia permitan un motor API 547, es la opción más clara. Para aplicaciones de propósito general que no son críticas pero que aún requieren un motor de servicio severo, la especificación API 547 generalmente ofrece una alternativa menos costosa. © Siemens Industry, Inc. 2016 Página 4-17
- 109. Motores para pulpa y energía Durante más de 100 años, Siemens ha proporcionado las soluciones que la industria de pulpa y papel necesita para un alto rendimiento y una larga vida útil. Los diseños de motores TEFC de Siemens con potencias de hasta 3000 HP proporcionan una solución básica de bajo perfil y bajo mantenimiento para las aplicaciones más difíciles. Los motores están disponibles con las características necesarias para adaptarse a aplicaciones que van desde molinos, tambores descortezadores, blanqueo, filtros y descascarilladores hasta refinadores, líneas de batido, bombas de pulpa, sección de prensa y bobinadoras. © Siemens Industry, Inc. 2016 Página 4-18
- 110. Motores H-compact PLUS Los motores H-compact PLUS con potencias de hasta 18.000 HP (13 MW) y alturas de eje de hasta 710 mm se distinguen por su fiabilidad, bajo mantenimiento y eficiencia. Los motores H-compact PLUS ofrecen un valor excepcional y tienen un rendimiento y características diseñados para satisfacer los requisitos de las aplicaciones más exigentes. • Los rotores de barras de cobre de alta conductividad y los devanados del estator proporcionan un rendimiento eléctrico óptimo. • Los conceptos de refrigeración innovadores y el diseño modular dan como resultado • niveles de eficiencia y producción maximizados y un sistema que puede integrarse en cualquier entorno de planta. • El diseño con baja resistencia al viento y la precisión en todos los componentes giratorios y estacionarios minimizan las pérdidas por fricción. • El diseño distintivo del cojinete de manguito proporciona una calidad superior • Rendimiento y larga vida útil. • La alta densidad de potencia y la construcción compacta cumplen con los bajos • requisitos de espacio y peso. • El bajo nivel de ruido cumple con los requisitos de salud y seguridad. © Siemens Industry, Inc. 2016 Página 4-19
- 111. SITRAIN Mundo Desde los conocimientos básicos hasta las habilidades especializadas avanzadas, los cursos SITRAIN de Siemens ofrecen una amplia experiencia directamente del fabricante y abarcan todo el espectro de productos y sistemas de Siemens Industry. A nivel mundial, los cursos SITRAIN están disponibles en más de 200 ubicaciones en más de 60 países. Para obtener información adicional, incluido un mapa mundial de SITRAIN y contactos de SITRAIN en todo el mundo: http://sitrain.automation.siemens.com/sitrainworld/Default.aspx © Siemens Industry, Inc. 2016 Página 4-20
- 112. Finalización del curso Este curso cubrió los siguientes temas: Este curso ha cubierto los temas que se muestran a la izquierda. Gracias por su esfuerzo. Puede completar este curso presentando el examen final y obteniendo al menos un 70%. Capítulo 1 - Introducción • Conceptos básicos Capítulo 2 – Fundamentos del motor • Electromagnetismo • Rotación del rotor Capítulo 3 – Motores NEMA • Diseños de motores • Cerramientos de motores Capítulo 4 – Siemens Motors • Motores NEMA • Motores IEC • Motores superiores a NEMA © Siemens Industry, Inc. 2016 Página 4-21