










Robotica1
- 1. 1 Robótica I Prof. Alexandre Silva prof.alexandre.engenharia@gmail.com www.engenhariamecanicaaulas.blogspot.com.br 2016.1
- 2. 2 Robótica Prof. Alexandre Silva O termo robô vem originalmente do idioma checo ‘robota’, que significa “trabalhos forçados”. Ele foi criado por Karel Capek (1890-1938), escritor checo que escreveu um romance famoso em 1921 chamado “R.U.R.” (“Robôs Universais de Rossum”).
- 3. 3 Robótica Prof. Alexandre Silva A definição de robô segundo o R.I.A., 'Robotics Institute of America' (ou seja, Instituto Americano de Robótica) é: “Robô é um manipulador reprogramável e multi-funcional projetado para mover materiais, partes, ferramentas ou dispositivos especializados através de movimentos variáveis programados para desempenhar uma variedade de tarefas”. Uma melhor definição seria: “Um robô é um dispositivo que permite realizar trabalhos mecânicos, normalmente associados a seres humanos, de uma maneira muito mais eficiente e sem a necessidade de pôr em risco a vida humana”.
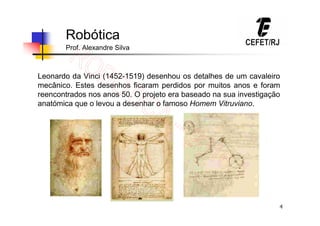
- 4. 4 Robótica Prof. Alexandre Silva Leonardo da Vinci (1452-1519) desenhou os detalhes de um cavaleiro mecânico. Estes desenhos ficaram perdidos por muitos anos e foram reencontrados nos anos 50. O projeto era baseado na sua investigação anatómica que o levou a desenhar o famoso Homem Vitruviano.
- 5. 5 Robótica Prof. Alexandre Silva O nome “Robótica” foi criado em 1941, também na literatura. Numa obra do escritor russo-americano Isaac Asimov (1920-1992) intitulada “Runaround” o termo Robótica foi utilizado como sendo o estudo e o uso de robôs. Mais tarde o termo foi adoptado pela comunidade científica. Este conto foi compilado mais tarde (em 1950) no livro “I, Robot” (“Eu, robô”) e mais recentemente (2004) retratado no cinema. Foi neste conto que Asimov fez a primeira apresentação explícita das Leis da Robótica.
- 6. 6 Robótica Prof. Alexandre Silva Leis da Robótica de Asimov 1º)Um robô não pode ferir um ser humano ou, por omissão, permitir que um ser humano sofra algum mal. 2º)Um robô deve obedecer as ordens que lhe sejam dadas por seres humanos, exceto nos casos em que tais ordens contrariem a Primeira Lei. 3º)Um robô deve proteger sua própria existência desde que tal proteção não entre em conflito com a Primeira e Segunda Leis.
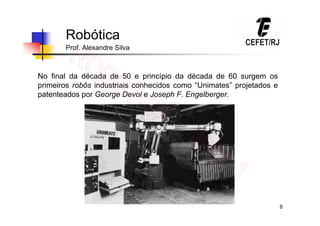
- 8. 8 Robótica Prof. Alexandre Silva No final da década de 50 e princípio da década de 60 surgem os primeiros robôs industriais conhecidos como “Unimates” projetados e patenteados por George Devol e Joseph F. Engelberger.
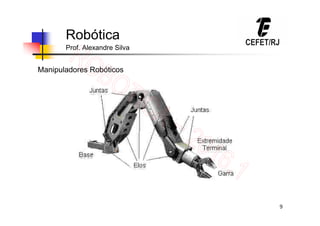
- 9. 9 Robótica Prof. Alexandre Silva Manipuladores Robóticos
- 10. 10 Robótica Prof. Alexandre Silva Manipuladores Robóticos
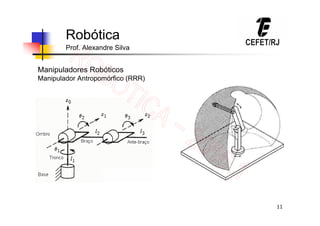
- 11. 11 Robótica Prof. Alexandre Silva Manipuladores Robóticos Manipulador Antropomórfico (RRR)
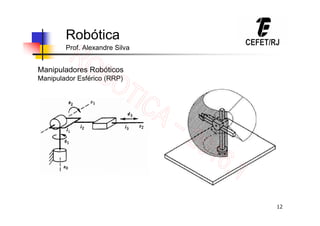
- 12. 12 Robótica Prof. Alexandre Silva Manipuladores Robóticos Manipulador Esférico (RRP)
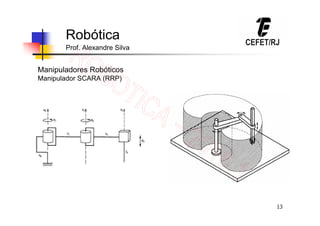
- 13. 13 Robótica Prof. Alexandre Silva Manipuladores Robóticos Manipulador SCARA (RRP)
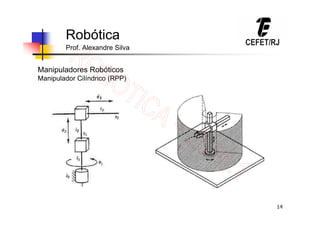
- 14. 14 Robótica Prof. Alexandre Silva Manipuladores Robóticos Manipulador Cilíndrico (RPP)
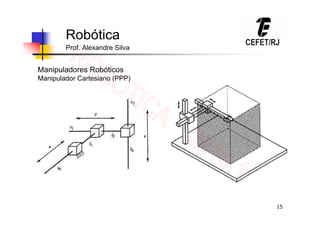
- 15. 15 Robótica Prof. Alexandre Silva Manipuladores Robóticos Manipulador Cartesiano (PPP)
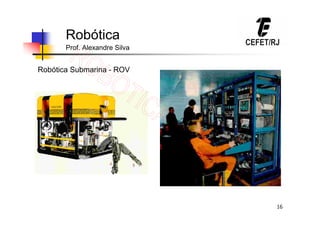
- 16. 16 Robótica Prof. Alexandre Silva Robótica Submarina - ROV
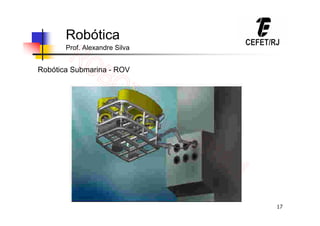
- 17. 17 Robótica Prof. Alexandre Silva Robótica Submarina - ROV
- 18. 18 Robótica Prof. Alexandre Silva Robótica Submarina - AUV
- 19. 19 Robótica Prof. Alexandre Silva AGV – Automated Guided Vehicle
- 20. 20 Robótica Prof. Alexandre Silva Robos Bípedes
- 21. 21 Robótica Prof. Alexandre Silva Robos Quadrupedes
- 22. 22 Robótica Prof. Alexandre Silva Robos Hexápodes
- 23. 23 Robótica Prof. Alexandre Silva Robos Octópodes
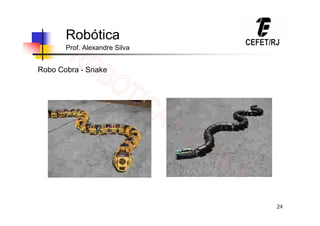
- 24. 24 Robótica Prof. Alexandre Silva Robo Cobra - Snake
- 25. 25 Robótica Prof. Alexandre Silva Robo com Esteiras
- 26. 26 Robótica Prof. Alexandre Silva Robo com Rodas
- 27. 27 Robótica Prof. Alexandre Silva Robo Lego – Servo-motores São compostos por motores DC e um redutor de velocidade, junto com um sensor de posição e um sistema de controle realimentado. Os servo-motores são pequenos, com ampla variação de torques. O mecanismo de posicionamento ajusta a posição angular por meio de um sinal codificado que lhe é enviado. Em geral o sinal e do tipo PWM (Pulse Width Modulation), ou seja, a posição angular irá depender da largura do pulso enviado.
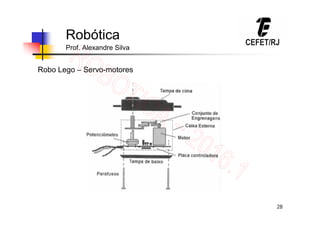
- 28. 28 Robótica Prof. Alexandre Silva Robo Lego – Servo-motores
- 29. 29 Robótica Prof. Alexandre Silva Robo Lego – Servo-motores
- 30. 30 Robótica Prof. Alexandre Silva Robo Lego – Sensor de cor Pode detectar até 6 cores diferentes, ou sensor de luminosidade, medindo a intensidade da luz ambiente. Também pode ser usado como uma lâmpada colorida, nas cores vermelha verde ou azul. Pode ter seu resultado afetado na medição de cor quando há má iluminação no ambiente.
- 31. 31 Robótica Prof. Alexandre Silva Robo Lego – Sensor de ultrasom Mede distâncias até 2,5 metros. Pode dar respostas em duas unidades (centímetros ou polegadas). Tem uma precisão de + ou – 3 cm.
- 32. 32 Robótica Prof. Alexandre Silva Robo Lego – Servo-motor Permite controle de potência e de rotação, sendo possível fazer movimentos com 1 grau de precisão. Tem um sensor de rotação embutido que pode ser utilizado na lógica de programação.
- 33. 33 Robótica Prof. Alexandre Silva Robo Lego – Controlador NXT Controlador NXT: é o cérebro do robô. Recebe toda a programação feita via software. ->Processador ARM7 32 bits; ->Memória Flash de 256 Kbytes; ->Memória RAM de 512 Bytes; ->Microcontrolador AVR de 8 bits; ->Comunicação wireless Bluetooth Classe 2 versão 2.0; ->Porta USB de 12 Mbit/s; ->Display LCD de 100 x 64 pixels; ->Alto falante de 8kHz; ->Fonte de energia: seis pilhas AA ou bateria de lítio recarregável; ->Quatro portas de entrada e três portas de saída;
- 34. 34 Robótica Prof. Alexandre Silva Robo Lego – Software O software foi desenvolvido baseado na plataforma LabView, da National Instruments, que utiliza o conceito de programação gráfica por meio de blocos funcionais, que no Labview são chamados de VI (virtual instruments, ou instrumentos virtuais no português).
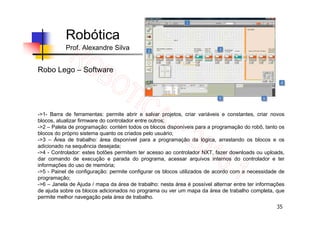
- 35. 35 Robótica Prof. Alexandre Silva Robo Lego – Software ->1- Barra de ferramentas: permite abrir e salvar projetos, criar variáveis e constantes, criar novos blocos, atualizar firmware do controlador entre outros; ->2 – Paleta de programação: contém todos os blocos disponíveis para a programação do robô, tanto os blocos do próprio sistema quanto os criados pelo usuário; ->3 – Área de trabalho: área disponível para a programação da lógica, arrastando os blocos e os adicionado na sequência desejada; ->4 - Controlador: estes botões permitem ter acesso ao controlador NXT, fazer downloads ou uploads, dar comando de execução e parada do programa, acessar arquivos internos do controlador e ter informações do uso de memória; ->5 - Painel de configuração: permite configurar os blocos utilizados de acordo com a necessidade de programação; ->6 – Janela de Ajuda / mapa da área de trabalho: nesta área é possível alternar entre ter informações de ajuda sobre os blocos adicionados no programa ou ver um mapa da área de trabalho completa, que permite melhor navegação pela área de trabalho.
- 36. 36 Robótica Prof. Alexandre Silva Robo Lego – Blocos Prontos Bloco Motor – utilizado para movimentar um motor em graus, rotações ou por tempo, e também para pará-lo, imediatamente ou por inércia. Permite escolher a direção do giro e a potência do motor. Bloco Display – utilizado para exibir informações no display do Controlador NXT. Permite exibir gráficos ou textos. Bloco Ultrasonic Sensor – permite receber a informação lida pelo sensor ultrasônico em centímetros ou polegadas. Bloco Color Sensor - permite receber a informação lida pelo sensor de cor. Bloco Wait – bloco que realiza a parada do programa durante um determinado tempo ou até que se tenha uma determinada resposta de um dos sensores.
- 37. 37 Robótica Prof. Alexandre Silva Robo Lego – Blocos Prontos Bloco Loop – bloco que determina uma área da lógica de programação que será repetida até que uma condição seja satisfeita. As condições de repetição podem ser determinadas por uma resposta de sensor, número de iterações, por tempo, por uma resposta lógica ou pode ter suas repetições ilimitadas. Bloco Switch – este bloco determina uma área da lógica da programação que somente será realizada caso uma condição pré-determinada seja ou não realizada. Com este bloco é possível realizar o “Se...então...” da lógica tradicional. Bloco Logic – permite realizar operações lógicas entre dois dados de entrada. As operações são “Ou”, “E”, “Ou Exclusiva” e “Negação”.
- 38. 38 Robótica Prof. Alexandre Silva Robo Lego – Blocos Prontos Bloco Math – permite realizar operações matemáticas entre dois dados de entrada, como Adição, Subtração, Multiplicação e Divisão, ou operações com um só dado de entrada, como o Valor Absoluto e a Raiz Quadrada. Bloco Compare – realiza comparações entre dois dados de entrada numéricos. As comparações podem ser “Maior que”, “Menor que” ou “Igual a”. Bloco Variable – permite ler ou escrever um valor em uma determinada variável. As variáveis podem ser do tipo texto, numérico ou lógico. Bloco Number to Text – transforma informação numérica em informação textual, permitindo, por exemplo, que números sejam exibidos no display do controlador NXT.
- 39. 39 Robótica Prof. Alexandre Silva Robo Lego – Blocos Prontos Bloco File Access – este bloco é um dos mais utilizados neste projeto e permite escrever, apagar e ler e fechar arquivos no controlador NXT.
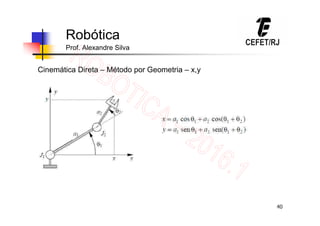
- 40. 40 Robótica Prof. Alexandre Silva Cinemática Direta – Método por Geometria – x,y
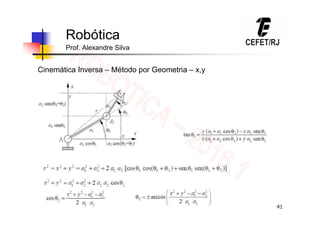
- 41. 41 Robótica Prof. Alexandre Silva Cinemática Inversa – Método por Geometria – x,y
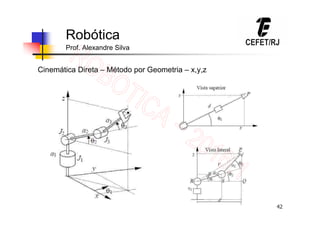
- 42. 42 Robótica Prof. Alexandre Silva Cinemática Direta – Método por Geometria – x,y,z
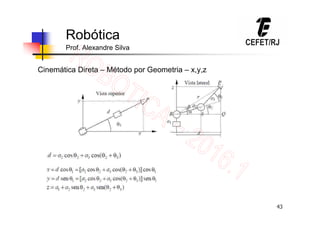
- 43. 43 Robótica Prof. Alexandre Silva Cinemática Direta – Método por Geometria – x,y,z
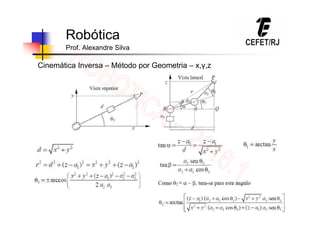
- 44. 44 Robótica Prof. Alexandre Silva Cinemática Inversa – Método por Geometria – x,y,z
- 45. 45 Robótica Prof. Alexandre Silva Cinemática Inversa – Método por Matriz de Transformação Ver material sobre cinematica que está no blog.
- 46. 46 Robótica Prof. Alexandre Silva Boa Prova!!!