Introduçãoa sskdlasadscdddRoboticas.pptx
Transferir como PPTX, PDF0 gostou33 visualizações

O documento aborda a definição, tipos e aplicações da robótica, além de sua história e principais questões relacionadas, como as leis da robótica propostas por Asimov. Destaca o desenvolvimento de robôs, desde o Unimate em 1954 até os avanços mais recentes em robótica móvel e educativa. O futuro da robótica é abordado com ênfase em inteligência artificial e robôs autônomos em diversas indústrias.





Introduçãoa sskdlasadscdddRoboticas.pptx
- 1. Introdução à Robótica Prof. Maurício Dias Adaptado dos slides de Vikram Kapila, Associate Professor, Mechanical Engineering
- 2. Roteiro • Definição • Tipos • Aplicações • Historia • Principais Questões • Aplicações (II) • Futuro
- 3. Definição • O termo foi definido por Karel Capek em uma peça de teatro em 1920 chamada Rassum’s Universal Robots (RUR) • Robot em Checo é uma palavra utilizada para servo • Possível definição de Robô: – Um robô pode ser um manipulador universal programável desenvolvido para lidar com ferramentas e peças seguindo um conjunto de movimentos programados e realizando diferentes tarefas Karel Capek
- 4. Tipos de Robôs: I Manipulador
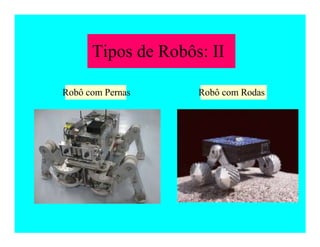
- 5. Robô com Rodas Robô com Pernas Tipos de Robôs: II
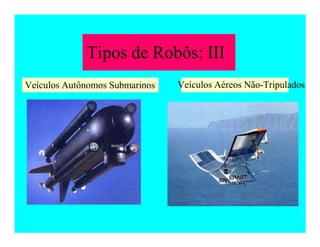
- 6. Tipos de Robôs: III Veículos Aéreos Não-Tripulados Veículos Autônomos Submarinos
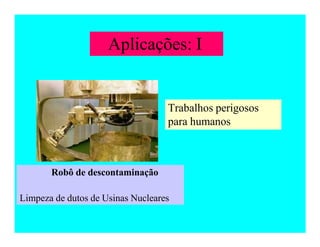
- 7. Aplicações: I Robô de descontaminação Limpeza de dutos de Usinas Nucleares Trabalhos perigosos para humanos
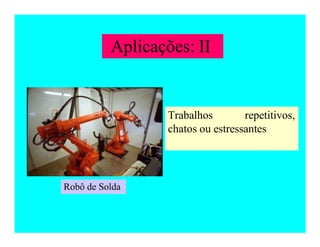
- 8. Trabalhos repetitivos, chatos ou estressantes Robô de Solda Aplicações: II
- 9. The SCRUBMATE Robot Tarefas que pessoas não gostariam de cumprir Aplicações: III
- 10. Leis da Robótica • Asimov propôs as três leis da robótica e depois definiu a Lei 0 • Lei 0: Um robô não deve causar danos à humanidade ou perimitir danos por omissão. • Lei 1: Um robô não deve causar danos aum ser humano ou permitir que ele cause dano a outro ser humano por omissão. • Lei 2: Um robô deve obedecer humanos, a menos que isso infrinja alguma das leis anteriores. • Lei 3: Um robô deve proteger sua existência a menos que isso infrinja as leis anteriores.
- 11. • Primeiro robô industrial: UNIMATE • 1954: Primeiro robô programável desenvolvido por George Devol, que criou o termo Universal Automation. Depoi o termo foi reduzido para Unimation o primeiro robô da compania(1962). UNIMATE automatizou a produção de tudos de TV História da Robótica: I
- 12. PUMA 560 Manipulador História da Robótica: II 1978: Puma (Programmable Machine for Universal Assembly) foi desenvolvido pela Unimation com suporte da General Motors
- 13. 1980s: A robótica industrial começa um crescimento rápido. Cursos de robótica dão criados em universidades e adicionados a cursos de engenharia e computação Adept’s SCARA robots Barrett Technology Manipulator Cognex In-Sight Robot História da Robótica: III
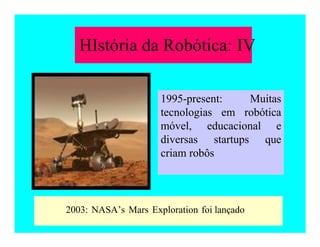
- 14. 2003: NASA’s Mars Exploration foi lançado 1995-present: Muitas tecnologias em robótica móvel, educacional e diversas startups que criam robôs HIstória da Robótica: IV
- 15. •Conhecimentos necessários para se trabalhar na Robótica –Modelagem e Análise de Sistemas Dinâmicos –Controle de Feedback –Sensores e condicionamento de Sinal –Atuadores e Eletrônica de Potência –Interface Hardware/Software –Programação Conheicmentos para Robótica Disciplinas: matemática, ficisca, biologia, engenharia mecânica, computação
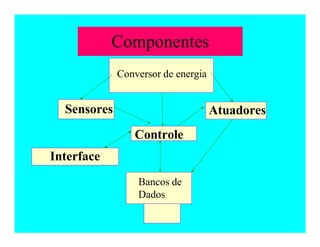
- 16. Componentes Controle Sensores Atuadores Interface Conversor de energia Bancos de Dados
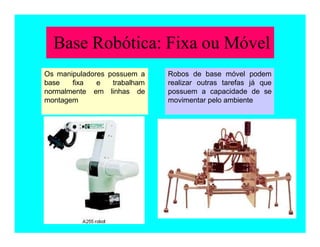
- 17. Base Robótica: Fixa ou Móvel Robos de base móvel podem realizar outras tarefas já que possuem a capacidade de se movimentar pelo ambiente Os manipuladores possuem a base fixa e trabalham em linhas de normalmente montagem
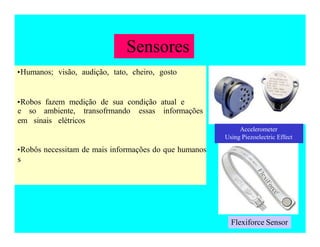
- 19. Sensores •Humanos; visão, audição, tato, cheiro, gosto •Robos fazem medição de sua condição atual e e so ambiente, transofrmando essas informações em sinais elétricos •Robôs necessitam de mais informações do que humanos s Accelerometer Using Piezoelectric Effect Flexiforce Sensor
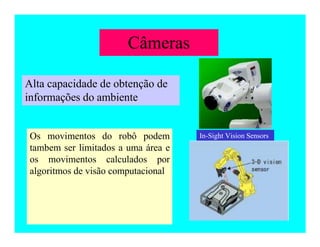
- 20. In-Sight Vision Sensors Os movimentos do robô podem tambem ser limitados a uma área e os movimentos calculados por algoritmos de visão computacional Alta capacidade de obtenção de informações do ambiente Câmeras
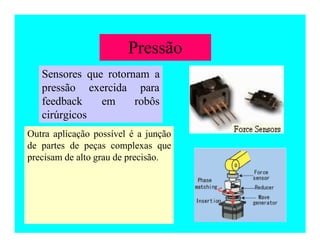
- 21. Outra aplicação possível é a junção de partes de peças complexas que precisam de alto grau de precisão. Sensores que rotornam a exercida em para robôs pressão feedback cirúrgicos Pressão
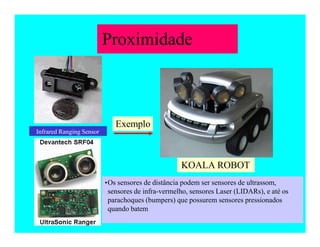
- 22. Infrared Ranging Sensor KOALA ROBOT •Os sensores de distância podem ser sensores de ultrassom, sensores de infra-vermelho, sensores Laser (LIDARs), e até os parachoques (bumpers) que possurem sensores pressionados quando batem Proximidade Exemplo
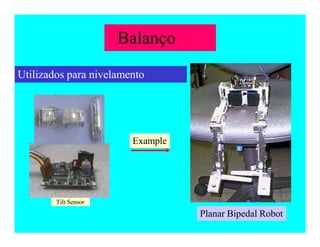
- 23. Tilt Sensor Planar Bipedal Robot Utilizados para nivelamento Balanço Example
- 24. Atuadores: I • Autadores robóticos utilizam combinações de elementos mecânicos e eletrônicos – Motor elétrico – Motor de Passo – Motor de corrente alternada – Motores com redução http://www.ab.com/motion/servo/fseries.html
- 25. Hydraulic Motor Stepper Motor Pneumatic Motor Servo Motor Atuadores: II Pneumatic Cylinder DC Motor Muscle Wire
- 26. Controlador • Responsável por controlar os atuadores, baseando- se no processamento de informações, para que o robô possa realizar tarefas específicas
- 27. Memória A memória nos robôs é utilizada para armazenar dados de sensores e processamento
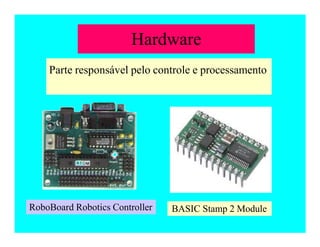
- 28. Parte responsável pelo controle e processamento BASIC Stamp 2 Module RoboBoard Robotics Controller Hardware
- 29. Analog to Digital Converter Operational Amplifiers Alguns sensores precisam ter suas informações convertidas para o formato digital, para que possam ser processadas Interface de Hardware LM358 LM358 LM1458 dual operational amplifier
- 30. •Agriculture •Automobile •Construction •Entertainment •Health care: hospitals, patient-care, surgery , research, etc. •Laboratories: science, engineering , etc. •Law enforcement: surveillance, patrol, etc. •Manufacturing •Military: demining, surveillance, attack, etc. •Mining, excavation, and exploration •Transportation: air, ground, rail, space, etc. •Utilities: gas, water, and electric •Warehouses Robots na indústria
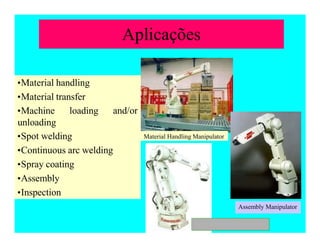
- 31. Aplicações Material Handling Manipulator Assembly Manipulator Spot Welding Manipulator and/or •Material handling •Material transfer •Machine loading unloading •Spot welding •Continuous arc welding •Spray coating •Assembly •Inspection
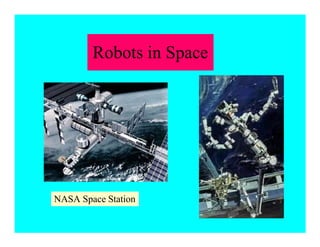
- 32. Robots in Space NASA Space Station
- 33. Robôs em ambientes perigosos TROV in Antarctica operating under water HAZBOT operating in atmospheres containing combustible gases
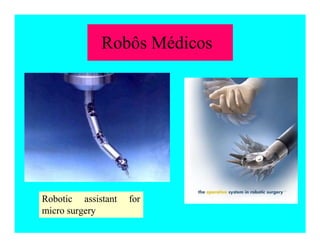
- 34. Robôs Médicos Robotic assistant for micro surgery
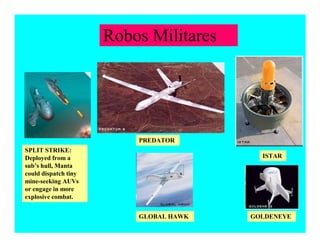
- 35. Robos Militares SPLIT STRIKE: Deployed from a sub’s hull, Manta could dispatch tiny mine-seeking AUVs or engage in more explosive combat. PREDATOR GLOBAL HAWK ISTAR GOLDENEYE
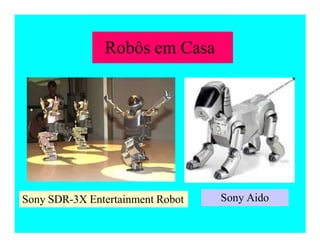
- 36. Robôs em Casa Sony Aido Sony SDR-3X Entertainment Robot
- 37. Futuro dos Robôs: I Cog Kismet Artificial Intelligence
- 38. Futuro dos Robôs: II Garbage Collection Cart Robot Work Crews Autonomy
- 39. Futuro dos Robôs: III HONDA Humanoid Robot Humanoids