Desenvolvimento de-robo-movel (1)
0 gostou•577 visualizações

Este documento apresenta o desenvolvimento de um robô móvel autônomo capaz de explorar ambientes hostis. O robô utiliza sensores ultrassônicos para detecção de obstáculos e sensores de velocidade nos motores para mapeamento do ambiente. Testes foram realizados para calibração dos sensores e validação do sistema de comunicação e controle remoto do robô.







![1
1 INTRODUÇÃO
De uma forma geral, é difícil associar a palavra simplicidade quando as pessoas são
estimuladas a tentar compreender a teoria associada à construção e ao próprio funcionamento
dos robôs. Afinal, a robótica envolve os mais variados conceitos nas áreas de mecânica,
eletrônica e informática. A complexidade do sistema está intrinsecamente ligada ao objetivo
para o qual o robô está sendo projetado.
Hoje em dia, os conceitos de robótica são utilizados em uma série de aplicações na
indústria, educação e também em pesquisas aeroespaciais. São exemplos de aplicações:
1. Situações que possam acarretar algum perigo à saúde humana: exploração de
ambientes hostis onde há presença de gases tóxicos [1], inspeção de tubulações
visando detecção de vazamentos e medições de concentração de gases [2] [3]
[4], temperatura elevada ou exposição à radiação [5] [6], detecção de bombas
em zonas de guerra e limpeza de reatores nucleares [7];
2. Organizações que realizam competições de Futebol de Robôs, com o objetivo
de incentivar o desenvolvimento da robótica, da visão computacional e da
inteligência artificial [8] [9] [10] [11];
3. Processos de manufatura com o objetivo de evitar desperdícios, aumentando a
eficiência do sistema.
Com o intuito de auxiliar de uma forma prática no desenvolvimento e projeto de robôs
móveis, apresentando um sistema flexível, que possibilite a adição de novos componentes ao
sistema, expandindo assim a funcionalidade e aplicabilidade do robô, como por exemplo,
sensores de proximidade (para a detecção de obstáculos), sensores de temperatura, sensores
ultra-sônicos, sensores para a distinção de odores, entre outros [12] [13]. O trabalho foi
organizado da seguinte maneira:
• Capítulo 1: além de um breve resumo do trabalho, é dada uma visão geral
das principais etapas envolvidas no desenvolvimento e projeto de um robô,
assim como alguns exemplos de aplicações bem sucedidas nessa área de
estudo. Os objetivos do sistema projetado, também são apresentados.
• Capítulo 2: é mostrado uma breve revisão bibliográfica, procurando
demonstrar alguns dos trabalhos mais importantes e que de alguma forma
contribuíram para o desenvolvimento desse projeto](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-19-320.jpg)


![5
FIGURA 1.2 – EXEMPLOS DE APLICAÇÕES
Definida a aplicação, o passo seguinte é definir o que o robô será capaz de fazer, ou
seja, como será o seu sistema sensorial. Nessa etapa deve-se avaliar, para essa aplicação, se é
essencial que:
• o robô tenha sensores que possibilitem o mapeamento do ambiente;
• que detecte objetos com o objetivo de evitar colisões;
• que tenha um sistema de orientação próprio.
Também nessa etapa é importante definir se o robô deve apresentar sistema de visão
embarcado [14]. Portanto, serão definidas as características básicas do robô.
Outra etapa importante é definir como será o controle e o processamento dos dados do
robô: ele será autônomo, semi-autônomo, ou tele-operado? Basicamente, o nível de
complexidade da lógica de programação do robô será definido nessa etapa. Definido o
controle, a definição do sistema de comunicação é conseqüência.
A próxima etapa é a definição dos atuadores, toda a movimentação do robô vai
depender do tipo de atuador escolhido [15].
Por último, o sistema de alimentação, que precisa ser muito bem dimensionado, para
que dê uma boa autonomia de funcionamento ao robô.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-23-320.jpg)

![7
2 REVISÃO BIBLIOGRÁFICA
O objetivo deste capítulo é o de expor de uma maneira macro e clara, alguns dos
trabalhos considerados importantes e que de alguma forma contribuíram para o
desenvolvimento desse projeto, de onde se extraiu algumas idéias e soluções para os diversos
módulos desse trabalho.
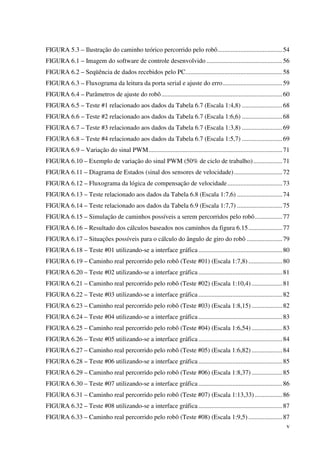
Através da Tabela 2.1, procurou-se sumarizar o conteúdo dos principais artigos,
demonstrando a aplicação para o qual ele é proposto e os principais componentes envolvidos
na aplicação prática das propostas desenvolvidas.
Apenas como referência, foi adicionada nessa mesma tabela, as características
equivalentes desse projeto proposto.
TABELA 2.1 – RESUMO DOS PRINCIPAIS ARTIGOS ANALISADOS
Aplicação Principal Locomoção Localização
Unidade de
Controle
Comunicação Sensores
Exploração
Futebolde
Robôs
GuerradeRobôs
MotordeCC
MotordePasso
BússolaDigital
Odometria
Câmera
GPS
Outros
Microtontrolador
PC
RF
Porfio
Ultrasom
Encoders/
Velocidade
Infravermelho
Contato
Temperatura
Outros
1
Construindo robôs
autônomos para
partidas de futebol: o
Time Guaraná. [8]
São apresentados os algorítmos usados na
implementação do software de controle, iniciando
pelo sistema de visão, partindo para o módulo
responsável pela decisão da estratégia de jogo e
por último, a plataforma de hardware utilizado.
2
Construção de robôs
jogadores de futebol.
[16]
São apresentados os conceitos utilizados na
construção de um robô utilizado em competições
de futebol de robôs, além de um detalhamento
dos sistemas de comunicação e movimentação
do robô.
3
Micro-Robot Soccer
Team - Mechanical and
Hardware
Implementation. [11]
Semelhante ao artigo anterior, os conceitos
aplicados na construção de um robô utilizado em
competições de futebol de robôs, como por
exemplo, os conceitos da arquitetura, do sistema
de movimentação e comunicação são
apresentados.
4
Controles de
velocidade e trajetória
para o robô Sonic
Shark e sensoriamento
por ultra-som. [17]
Este trabalho consiste no desenvolvimento de um
sistema de controles de velocidade, trajetória e
sensoriamento por ultra-som para uma plataforma
móvel rádio comandada.
5
Navegação de robôs
móveis em ambientes
desconhecidos
utilizando sonares de
ultra-som. [18]
São apresentados métodos para a navegação
autônoma de robôs móveis em ambientes sobre
os quais possui-se pouca ou nenhuma
informação. O sistema opera em tempo real,
utilizando os sonares do robô para fazer a
detecção dos obstáculos, e interage com o
sistema de controle do robô para rastreamento
das trajetórias desejadas.
6
Implementation of an
Intelligent Roving
Robot Using Multiple
Sensors. [12]
Conceitos de ativação por meio de comando de
voz, além de um interfaceamento com diversos
sensores ao mesmo tempo, apresentam através
deste artigo, um robô flexível e simples ao
mesmo tempo.
7
Comportamentos
reativos para seguir
pistas em um robô
móvel guiado por
visão. [19]
Este artigo descreve o projeto e a implementação
de um sistema de controle para um robô móvel
autônomo dotado de percepção, capaz de seguir
um caminho desenhado na superfície sobre a
qual o robô se move e evita colisões.
8
Sistema para
navegação e guiagem
de robôs móveis
autônomos. [20]
Neste artigo, é apresentado um sistema para
navegação e guiagem de robôs móveis
autônomos, utilizando-se encoders e bússola
digital. A informação de posição e atitude do
veículo é então utilizada por um sistema de
guiagem, baseado em controlador tipo fuzzy.
# Título do Trabalho Resumo do Trabalho
Trabalho Proposto (referência)
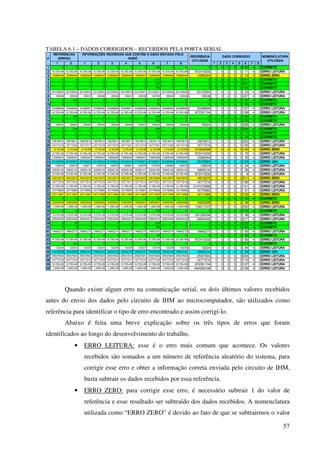
Os trabalhos 1, 2 e 3, conforme sumarizados na Tabela 2.1, estão relacionados com
aplicação e desenvolvimento de robôs para serem utilizados em competições de futebol de](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-25-320.jpg)

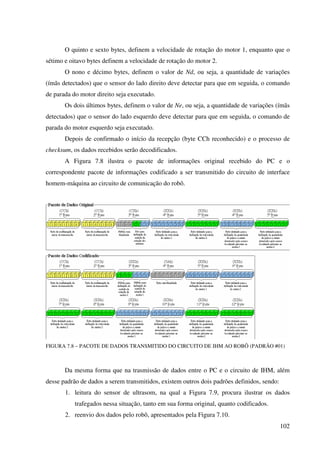
![11
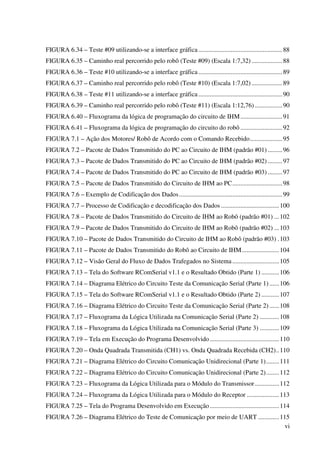
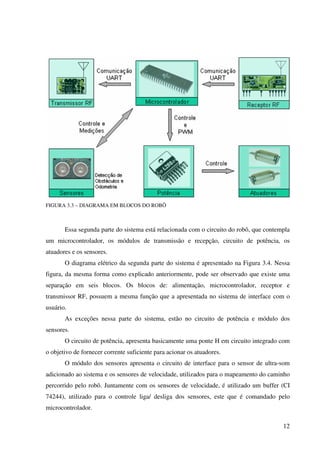
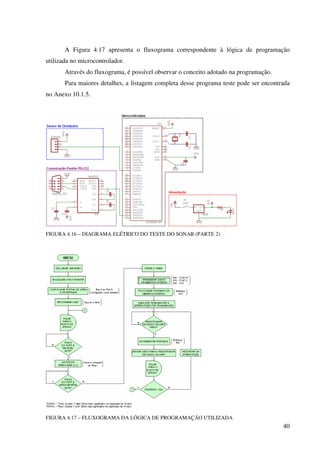
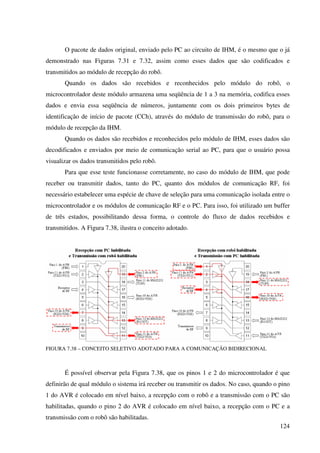
FIGURA 3.2 – DIAGRAMA ELÉTRICO DO SISTEMA DE INTERFACE COM O USUÁRIO
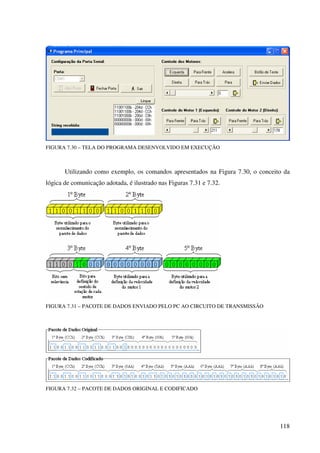
O terceiro bloco, circuito de comunicação padrão RS-232, é responsável pelo
interfaceamento entre o computador pessoal (PC) e o microcontrolador, o qual utiliza um
circuito integrado (CI) MAX232, que estabelece a conversão dos níveis de tensão do
microcontrolador (0V/+5V) para os níveis de tensão da porta serial do computador, padrão
RS232 (-12V/+12V) e vice-versa [21].
O quarto bloco, receptor de radiofreqüência (RF), contempla o módulo de recepção de
dados por meio de radiofreqüência, que como pode ser observado, possui apenas as ligações
para a alimentação, terra, antena externa e dados.
O quinto bloco, chamado de buffer, possui um circuito integrado 74244, que nada
mais é do que um buffer de três-estados, utilizado para controlar o fluxo de dados entre o
receptor RF e o PC, e entre o PC e o microcontrolador [22].
E por último o sexto bloco, transmissor RF, contempla o módulo de transmissão de
dados por meio de radiofreqüência, que assim como o receptor RF é extremamente simples,
possuindo apenas as ligações para a alimentação, terra, antena externa e dados, sendo que esta
última é ligada diretamente ao microcontrolador.
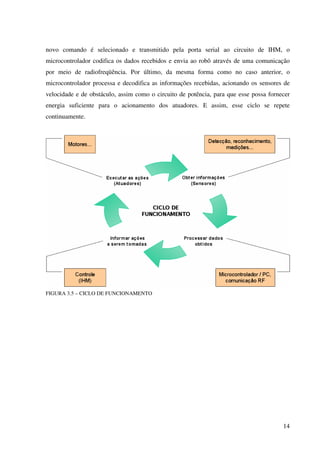
Como explicado anteriormente, o sistema projetado pode ser dividido em duas partes,
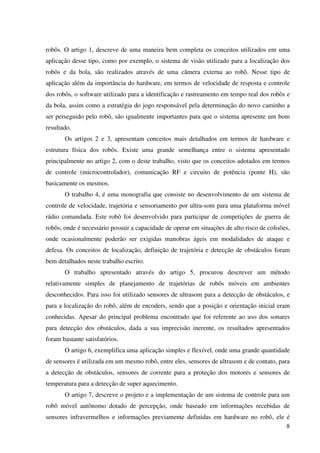
a Figura 3.3 ilustra o diagrama em blocos da segunda parte.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-29-320.jpg)
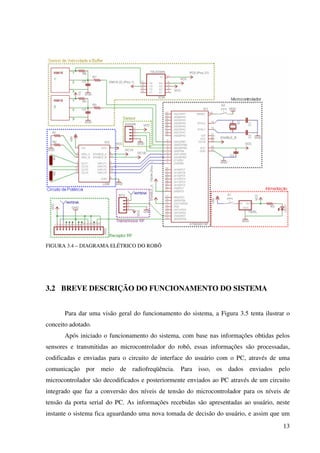

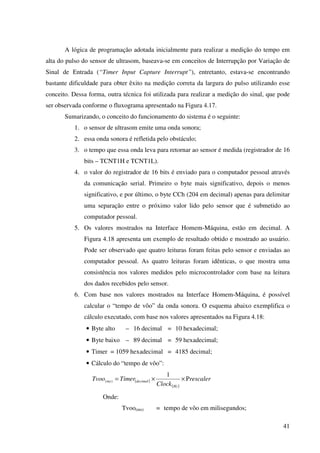
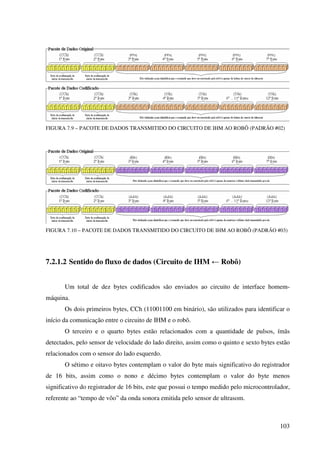
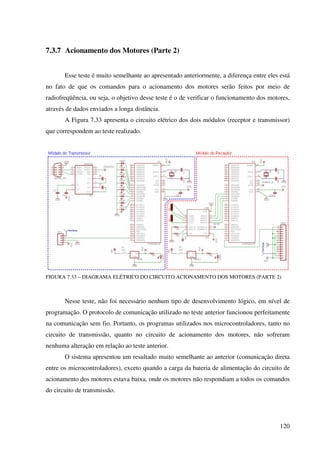
![16
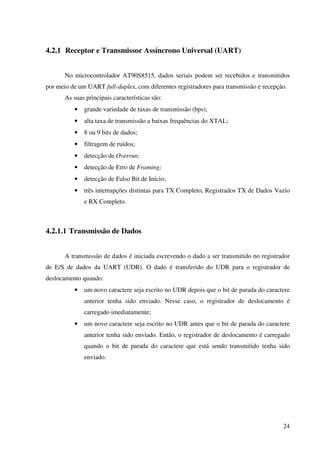
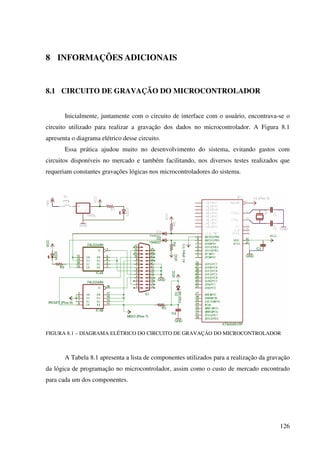
Designação Nomenclatura(9)
Fabricante Valor/Unid. Qtd
Custo(10)
(R$)
Transmissor RF RT4 Telecontrolli 433,92MHz 1 17,50
Cristal (Xtal) Q1 KDS 4MHz 1 1,30
Capacitor (Cerâmico) C1 e C2 Thonson 27pF 2 0,40
Capacitor (Cerâmico) C3 Thonson 100nF 1 0,20
Capacitor (Cerâmico) C4 e C5 Thonson 33pF 2 0,40
Resistor R1 e R2 Acel 27 2 0,10
Resistor R3 Acel 300 1 0,05
Resistor R4 e R6 Acel 2,7k 2 0,10
Resistor R5 e R7 Acel 10k 2 0,10
Regulador de Tensão 7805L STMicroelectronics 5V 1 1,00
LED LED1 Cons. Vermelho 1 1,20
Motores CC Faulhaber 1516E012S 2 340,00(11)
Redutor
M1 e M2
Faulhaber 15/3K 41:1 2 510,00(11)
Buffer Três-Estados HD74HC244 Hitachi - 1 1,30
Sensor de Velocidade KMI18/2 NXP - 2 30,00(12)
Sensor de Ultrasom SONAR Tato Eletrônicos - 1 50,00(13)
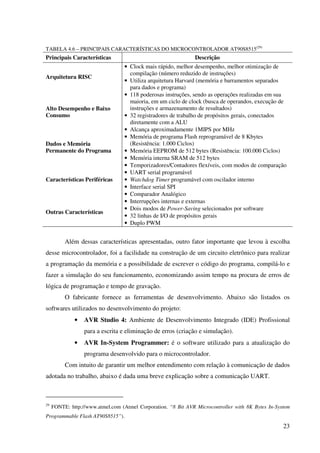
A seguir são apresentados maiores detalhes dos principais componentes e as principais
razões que levaram à escolha desses componentes.
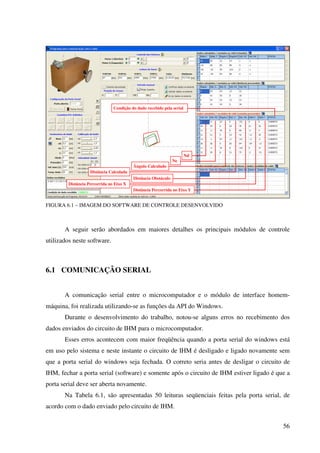
4.1 MÓDULOS DE COMUNICAÇÃO
Em momento algum do projeto foi considerada a possibilidade de se desenvolver os
módulos de comunicação, mesmo no início do desenvolvimento do projeto, onde se enfrentou
muita dificuldade para encontrar no mercado doméstico os módulos que seriam viáveis para a
execução do projeto a um custo acessível. A necessidade de operar em freqüências altas torna
o circuito muito crítico e de difícil manuseio sem o equipamento necessário [23].
Abaixo, são listados alguns dos fatores que foram considerados importantes durante a
escolha dos módulos de comunicação:
11
FONTE: motores@martebal.com.br (Divisão Faulhaber do Brasil, Santa Rita do Sapucaí, Minas Gerais, 2006)
12
FONTE: http://www.nxp.com/ (NXP Semiconducters, 2007)
13
FONTE: http://www.tato.ind.br/ (Tato Eletrônicos, São Paulo, 2006)](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-34-320.jpg)



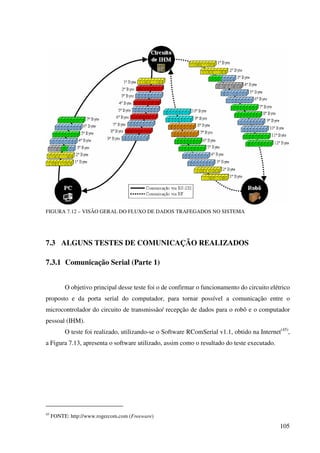
![22
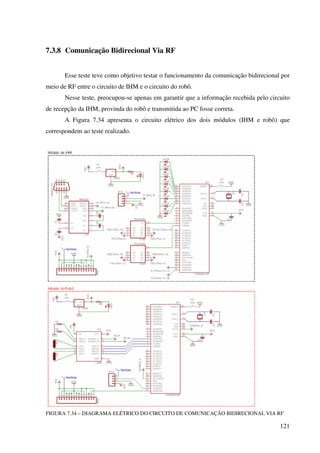
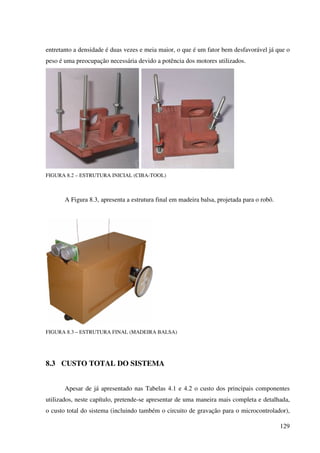
TABELA 4.5 – PARÂMETROS RELACIONADOS AO ESQUEMA DE CONFECÇÃO DA ANTENA(27)
Freqüência (MHz)
Dimensão Unidade
303,825 418,000 433,920 916,500
A Milímetros 135,89 99,06 90,17 40,13
B Milímetros 25,40 15,24 15,24 10,16
C Milímetros 6,35 15,24 13,97 4,57
D Milímetros 93,98 68,58 60,96 25,40
E Milímetros 9,53 2,54 2,54 2,54
F Número de Voltas 4 16 15 7
G AWG #20 #22 #22 #24
Durante alguns testes, a antena utilizada foi apenas um pedaço de fio de cobre com
comprimento igual a ¼ do comprimento de onda [24], calculado conforme fórmula abaixo:
4
)(
λ
=cmL →
f
c
=λ
onde:
λ = comprimento de onda de uma onda sonora ou onda eletromagnética;
c = velocidade da luz no vácuo ≈ 300,000 km/s;
f = freqüência da onda 1/s = Hz.
Logo:
)(
)/(
8
)(
92,4334
103
MHz
sm
mL
×
×
= ∴ )()( 28,17 cmcmL =
4.2 MICROCONTROLADOR
O microcontrolador utilizado foi o AVR AT90S8515(28)
da Atmel, sendo que suas
principais características são mostradas na Tabela 4.6 [25].
27
FONTE: http://www.rfm.com (RF Monolithics, Inc. The RX Series SMT Hybrid ASH Receivers)
28
Não recomendado mais pelo fabricante (Atmel Corporation), substituído pelo ATmega8515.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-40-320.jpg)
![26
para que se tenha uma taxa de transmissão na ordem de 2.400bps e utilizando um cristal de
4MHz, o valor de UBRR é de 103 e a taxa de erro é de aproximadamente 0,2%.
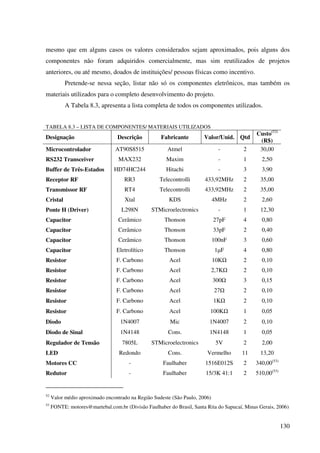
4.3 MÓDULO DE POTÊNCIA
O CI L298N é o responsável pelo módulo de potência no circuito do robô. Esse
componente nada mais é do que uma ponte H em um circuito integrado. As maiores
vantagens de se utilizar um componente como esse, está na redução do espaço ocupado no
circuito e na simplicidade da montagem.
A Figura 4.7 apresenta o diagrama em blocos do CI L298N [26].
FIGURA 4.7 – DIAGRAMA EM BLOCOS DO CI L298N(30)
O L298 integra dois estágios de potência de saída (A e B). O estágio de potência de
saída, dependendo do estado da entrada, pode movimentar uma carga indutiva, como por
exemplo, relés, solenóides, motores de passo e motores de corrente contínua.
Na Tabela 4.7 são mostradas as funções dos principais pinos de conexão do L298.
30
FONTE: http://www.st.com (STMicroelectronics)](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-44-320.jpg)




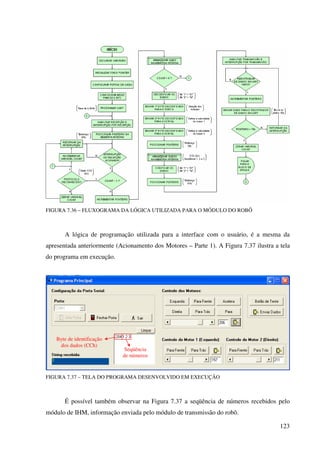
![32
0,0
5,0
10,0
15,0
20,0
25,0
30,0
0 100 200 300 400
-
0,05
0,10
0,15
0,20
0,25
0,30
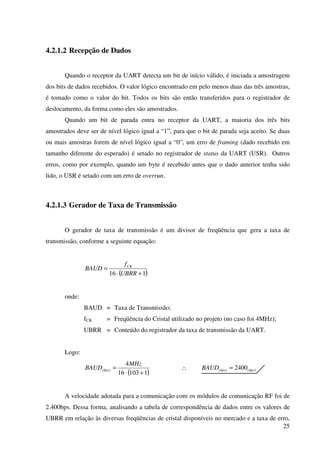
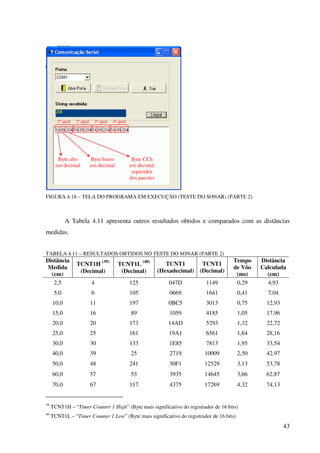
FIGURA 4.10 – CURVA DE TORQUE E POTÊNCIA VS. VELOCIDADE ANGULAR (COM REDUÇÃO)
4.5 SENSORES
Podem-se definir sensores, como sendo dispositivos que mudam seu comportamento
sob a ação de uma grandeza física, podendo fornecer diretamente ou indiretamente um sinal
que indica essa grandeza.
A seguir, são apresentadas algumas características que diferenciam os tipos de
sensores encontrados e que são importantes na definição de qual tipo de sensor é mais
apropriado para um determinado sistema [27]:
• sensibilidade: taxa de variação da leitura em relação ao estímulo;
• linearidade: medida de constância da sensibilidade;
• faixa de medida: diferença entre o mais intenso e o menos intenso estímulo
mensurável;
• tempo de resposta: tempo necessário para uma mudança de estímulo se refletir
na leitura;
Velocidade
sem Carga
“Stall Torque”
Torque (mN.m)
Velocidade Angular
(RPM)
Potência
vs.
Velocidade Angular
Torque
vs.
Velocidade Angular
Potência (W)](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-50-320.jpg)
![33
• precisão: diferença entre leitura e estímulo;
• repetibilidade: diferença entre medidas sucessivas do mesmo estímulo;
• resolução: menor variação de estímulo mensurável;
• tipo de saída: movimento mecânico, corrente, tensão, pressão, nível de
luminosidade, etc.
Algumas características físicas também podem ser destacadas [27]:
• tamanho e peso: dependendo da aplicação, pode ser um aspecto muito
importante;
• confiabilidade: tempo médio para falha (MTTF “Mean Time to Failure”),
número médio de horas entre falhas que causam impossibilidade de operação
do sensor;
• interfaceamento: necessidade de conexões não padronizadas, tensões não-
padronizadas, etc.
• aumento de complexidade e custo.
Os principais tipos de sensores são: sensores térmicos (resistivos, termopar), sensores
mecânicos (deslocamento, posição, nível, tensão), sensores ópticos e sensores de campos
magnéticos.
Existe uma infinidade de tipos de sensores e cada um pode ser mais bem aplicado para
determinadas aplicações.
4.5.1 Sensores de Ultrasom
Os sensores de ultrasom (sonares) possuem propriedades únicas que são muito úteis na
robótica móvel. Esse tipo de sensor possui diversas vantagens, sendo relativamente barato,
robusto, preciso e capaz de detectar uma ampla variedade de objetos. O importante é que
estimativas robustas de distância podem ser extraídas dos dados fornecidos pelo sensor. Essas
informações podem ser utilizadas para evitar obstáculos, o que geralmente são difíceis de se
obter por outros métodos.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-51-320.jpg)
![34
4.5.1.1 Princípio de Funcionamento
O sensor emite um pulso acústico (onda sonora) e aguarda o retorno de um eco por um
determinado período de tempo. Assim que o eco é detectado, é possível medir a distância
entre um ponto observado, simplesmente multiplicando a velocidade do som pela metade do
tempo medido (metade do tempo de vôo da onda sonora).
4.5.1.2 Considerações Importantes
Apesar das vantagens citadas, existem alguns problemas que precisam ser levados em
consideração para a medição das distâncias [28]:
• velocidade de propagação: a velocidade de propagação das ondas sonoras é
fortemente influenciada por variações de temperatura e de uma forma mais
suave pela umidade atmosférica.
• incerteza na detecção: a energia refletida por um alvo depende do tipo de
material do qual é composta a superfície desse material, o qual vai influenciar a
intensidade do sinal refletido.
• interação com as superfícies: o eco recebido contém apenas uma fração da
energia contida no sinal enviado. A energia restante é perdida em efeitos de
absorção, difração ou refração. É freqüente, nesses tipos de sistemas, o sensor
não receber qualquer sinal refletido, mesmo existindo um objeto na frente dele.
Esse fenômeno deve-se ao fato de muitas superfícies se comportarem como
espelhos para as ondas ultra-sonoras. Assim, se o ângulo de emissão, em
relação à superfície do alvo, exceder um determinado valor crítico, a energia
refletida será desviada para fora da zona de detecção do receptor. O que pode
ocorrer, é que esses sinais sendo multiplamente refletidos, regressem ao
receptor produzindo uma medida errada que é igual à soma das distâncias
percorridas pelas ondas.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-52-320.jpg)
![35
4.5.1.3 Descrição do Módulo de Sonar Adotado
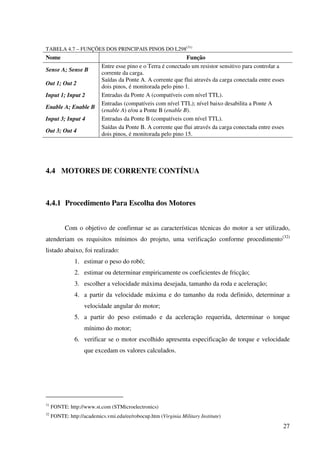
O sensor de ultrasom, conforme ilustrado na Figura 4.11, possui quatro pinos, sendo
dois da alimentação, Vcc (5V) e Terra, um pino de saída que fornece um pulso em nível alto
cuja duração é o tempo para o som ir até o obstáculo e voltar e um pino de entrada que
quando em nível baixo repete a medição.
FIGURA 4.11 – MÓDULO DE ULTRASOM ADOTADO (SONAR)(36)
De acordo com as especificações do fabricante(36)
, o módulo sonar tem um consumo
médio de 2mA, alcance mínimo de 20cm e máximo de 1,5m. No final deste Capítulo, serão
mostrados testes realizados que mostram que por meio do sistema projetado, foi possível
detectar objetos a uma distância mínima de até 4cm.
4.5.2 Sensores de Velocidade/ Posição
Os sensores de velocidade e/ou de posição, são normalmente utilizados para a
determinação do deslocamento do robô, na qual são acoplados nas rodas e possuem a
capacidade de medir a rotação das rodas.
Segue abaixo alguns tipos de sensores de deslocamento e velocidade em uso
atualmente e uma breve explicação sobre o funcionamento de cada um deles [28] [29].
• Encoder óptico incremental: um disco com janela a intervalos regulares é
iluminado por uma fonte de luz, sendo que do outro lado do disco, fica um
elemento fotosensível. Ao girar, alterna-se as áreas com janela e sem janela,
gerando no elemento fotosensível uma seqüência de pulsos. A contagem dos
pulsos, permite a avaliação do deslocamento angular.
36
FONTE: http://www.tato.ind.br/ (Tato Eletrônicos)](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-53-320.jpg)
![36
• Encoder óptico absoluto: fornece um valor numérico específico (valor
codificado) para cada posição angular. O disco codificado é firmemente
montado ao eixo. Esse disco é dividido em segmentos separados que são
alternadamente transparentes ou opacos. A fonte de luz emite um feixe de luz
orientado paralelamente que ilumina todos os segmentos do disco codificado.
Foto-unidades recebem a luz modulada e convertem-na em sinais que serão
posteriormente digitalizados e fornecidos como uma saída.
• Encoder indutivo: sensor bastante utilizado para medida de pequenas
distâncias, sendo baseado em correntes que são induzidas numa superfície
condutora quando as linhas de fluxo magnético interceptam essa superfície. As
correntes produzidas na superfície do material condutor é uma função da
distância da bobina ativa e a superfície. Essas correntes aumentam quando a
distância diminui.
• Encoder capacitivo: semelhante ao indutivo, a diferença entre eles reside no
fato de que no sensor capacitivo o princípio de funcionamento está baseado na
variação do dielétrico no meio em que o sensor está inserido. Quando nesta
região penetrar algum objeto, este provoca a variação do dielétrico e,
conseqüentemente a variação da freqüência do oscilador, variação esta que é
detectada e transformada em um nível de tensão.
• Potenciométrico: este tipo de sensor é bastante utilizado em impressoras jato de
tinta para controle do posicionamento do carro que contém os cartuchos de
tinta.
O mais popular tipo de encoder para robôs móveis é o encoder óptico (incremental ou
absoluto).
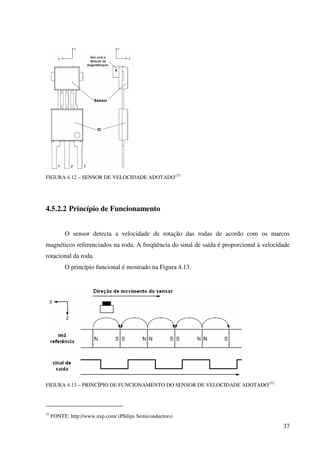
4.5.2.1 Descrição do Sensor de Velocidade Adotado
O sensor adotado é o KMI 18/2, que é um sensor integrado, utilizado para a medição
de velocidade rotacional [30]. Conforme ilustrado na Figura 4.12, o sensor possui apenas três
pinos, sendo dois da alimentação, Vcc (5V) e Terra, e um pino de saída.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-54-320.jpg)






![49
O método de odometria consiste na determinação da posição e orientação do robô
através da integração dos deslocamentos incrementais de suas rodas, medidos a partir de um
referencial fixo.
O deslocamento do robô é medido por meio de sensores acoplados nas rodas com a
capacidade de medir a rotação das rodas. Um tipo de sensor bastante utilizado nesse tipo de
aplicação, conforme já explicado no capítulo anterior, é o encoder ótico, que funciona com
base na transmissão e recepção de luz através de um disco perfurado, que gira acoplado ao
eixo que movimenta a roda do robô.
O sensor utilizado no projeto (detalhado no Capítulo 4), é um sensor integrado de
velocidade rotacional, dotado da capacidade de detectar referências magnéticas, basicamente,
a freqüência da tensão do sinal de saída é proporcional a velocidade rotacional da roda [30].
Para a plataforma robótica apresentada na figura 5.1, as medidas de odometria são feitas a
partir de dois sensores de velocidade acoplados a cada um dos motores, os quais permitem
medir as rotações da roda correspondente.
A partir dos dados coletados dos sensores, conhecendo-se alguns parâmetros
cinemáticos do robô e sabendo-se a localização inicial do robô, é possível deduzir as equações
[31] que irão determinar a sua posição e orientação em um dado instante.
Considerando o movimento executado pelo robô semelhante a um arco de
circunferência, conforme apresentado na Figura 5.2, e sabendo-se que r é o raio de giro do
robô, teremos que a velocidade linear de cada roda e do robô, assim como a sua velocidade
angular, serão:
+⋅=
2
L
rd ωυ → velocidade linear da roda direita.
−⋅=
2
L
re ωυ → velocidade linear da roda esquerda.
2
ed
r
υυ
ωυ
+
=⋅= → velocidade linear do robô.
Lr
ed υυυ
ω
−
== → velocidade angular do robô.
Como pode ser observado na Figura 5.2, considerando-se que o movimento executado
pelo robô ocorreu em um intervalo de tempo infinitesimal dt, é possível decompor o
deslocamento linear do robô, dl nas suas componentes horizontal (dx) e vertical (dy).](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-67-320.jpg)

![51
d
res
d
d r
N
N
l ⋅⋅⋅=∆ π2 → deslocamento da roda do lado direito.
e
res
e
e r
N
N
l ⋅⋅⋅=∆ π2 → deslocamento da roda do lado esquerdo.
Substituindo essas duas últimas equações às equações da velocidade linear de cada
roda, obtém-se:
t
r
N
N d
res
d
d
∆
⋅⋅
⋅=
π
υ
2
→ velocidade linear da roda direita.
t
r
N
N e
res
e
e
∆
⋅⋅
⋅=
π
υ
2
→ velocidade linear da roda esquerda.
Com base nessas duas últimas equações, e substituindo-as às equações anteriormente
apresentadas de deslocamento linear e angular, é possível obter a localização do robô em
relação a um referencial inicialmente conhecido, através das seguintes equações:
( ) ( ) ( ) ( )t
N
rNrNtxttx
res
eedd θ
π
cos⋅⋅⋅+⋅+=∆+
( ) ( ) ( ) ( )tsen
N
rNrNtytty
res
eedd θ
π
⋅⋅⋅+⋅+=∆+
( ) ( ) ( )eedd
res
rNrN
NL
ttt ⋅−⋅⋅
⋅
⋅
+=∆+
π
θθ
2
5.1 FONTES DE ERRO NA ODOMETRIA
Apesar de bastante utilizado, a odometria não é um método exato para determinar a
localização de um robô móvel em um determinado espaço de tempo, este método apresenta
erros que podem ser classificados de duas formas [32]:
• Erros sistemáticos: originados de características do robô e/ou sensores, por
exemplo:
- Diâmetro das rodas diferentes;
- Desalinhamento das rodas;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-69-320.jpg)
![52
- Incerteza sobre o ponto de contato da roda;
- Resolução finita dos sensores de velocidade;
- Comprimento do eixo diferente do comprimento nominal.
• Erros não sistemáticos: originados de características da relação do robô com o
ambiente, por exemplo:
- Movimento sobre solos não uniformes (rugosos);
- Movimento sobre obstáculos inesperados no solo;
- Escorregamento das rodas (solo escorregadio, aceleração acentuada,
rotações rápidas).
Os erros sistemáticos, são causados por incertezas nos parâmetros do modelo
cinemático do robô (por exemplo, comprimento do eixo e diâmetro das rodas), dessa forma,
são graves, pois são uma fonte constante de erros aditivos para o sistema.
Os erros não sistemáticos são imprevisíveis, pois independem das características
físicas do robô, mas sim do ambiente em que ele se encontra (por exemplo, imperfeições no
solo e obstáculos inesperados), ao contrário dos erros sistemáticos, esse tipo de erro não
ocorre durante toda a navegação do robô.
Através de alguns procedimentos de calibração [33], é possível reduzir os erros de
odometria, entretanto, nenhum deles foram aplicados nesse trabalho.
5.2 CÁLCULOS E TESTES
Como explicado anteriormente, para iniciar os cálculos para a definição da posição do
robô, é necessário o conhecimento dos seguintes parâmetros:
• Posição inicial do robô: x(0), y(0) e θ(0);
• Número de pulsos lidos em cada sensor de velocidade: Nd e Ne;
• Comprimento do eixo do robô: L;
• Raios de cada roda: rd e re;
• Resolução dos sensores, que é o número de pulsos lidos em uma revolução das
rodas: Nres.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-70-320.jpg)
![53
Apenas como exemplo, considera-se que:
• x(0) = y(0) = 0; θ(0) = 0;
• L = 10cm;
• rd = re = 3,2cm;
• Nres = 2.
Sabendo-se que a quantidade de pulsos por revolução das rodas é igual a 2, que o raio
de cada roda é de 3,2cm, pode-se concluir que a precisão do sistema é cerca de 10,05cm, que
é o menor deslocamento mensurável pelos sensores de velocidade. O objetivo para este teste
não é ter precisão, mas apenas um meio hipotético para mensurar o caminho percorrido pelo
robô, considerando-se uma resolução relativamente baixa.
Com base nos valores apresentados, e utilizando-se das equações de odometria,
conforme apresentado anteriormente, é possível estimar a posição atual do robô, variando-se
apenas o número de pulsos lidos em cada sensor de velocidade (Nd e Ne).
A Tabela 5.1, procura ilustrar o que foi explicado acima.
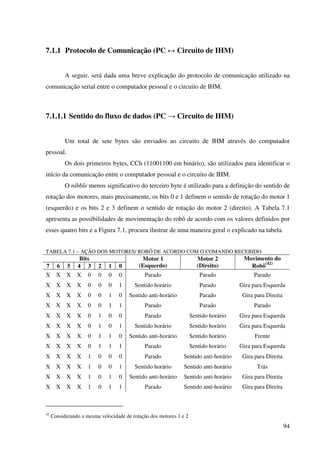
TABELA 5.1 – CÁLCULO DA POSIÇÃO E DIREÇÃO DO ROBÔ
Parâmetro Unidade 1 2 3 4 5 6 7 8 9
Nd [pulsos] 5,0 1,0 3,0 1,0 5,0 1,0 3,0 1,0 5,0
Ne [pulsos] 5,0 0,6 3,0 0,6 5,0 0,6 3,0 0,6 5,0
Vd [%] 100 100 100 100 100 100 100 100 100
Ve [%] 100 61 100 61 100 61 100 61 100
Vd [decimal] 0 0 0 0 0 0 0 0 0
Ve [decimal] 0 100 0 100 0 100 0 100 0
θ [rad] 0 1,57 1,57 3,14 3,14 4,71 4,71 6,28 6,28
θ [º] 0 90 90 180 180 270 270 360 360
x [cm] 50,27 55,04 55,04 49,53 -0,74 -5,51 -5,51 0,00 50,27
y [cm] 0,00 5,51 35,67 40,44 40,44 34,93 4,77 0,00 0,00
Os parâmetros Vd e Ve apresentados na Tabela 5.1, estão relacionados com os
parâmetros do PWM (“Pulse Width Modulation”) para o controle de velocidade dos motores,
onde 0 (100%), significa velocidade máxima de rotação e 255 (0%), significa que o motor
está parado. No exemplo em questão, quando Vd está em 100%, e Ve está 61% da velocidade
total, significa que o robô está fazendo uma curva para à esquerda, que teoricamente, quando
o sensor de velocidade do motor do lado direito detectar o primeiro marco magnético (pulso),](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-71-320.jpg)

![55
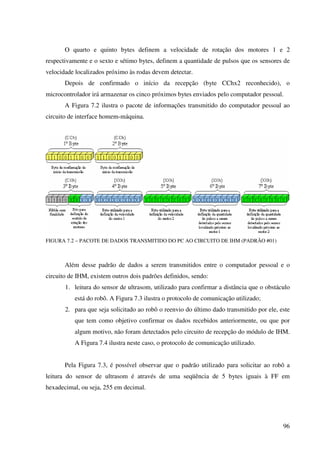
6 PROGRAMAÇÃO E SOFTWARE DE CONTROLE
O software de controle do robô, utilizado através da Interface Homem-Máquina (IHM)
do projeto, foi desenvolvido em Delphi® [34].
Logo abaixo é apresentada uma breve descrição de cada um dos principais módulos
criados durante o desenvolvimento deste software.
• Comunicação serial: para acessar a porta serial do microcomputador, foram
utilizadas as funções da API do Windows. Na listagem do programa
apresentada no Anexo 10.1.12, podem ser observados os comandos e conceitos
adotados para executar essa comunicação.
• Parâmetros de ajustes do robô: são ajustes necessários que podem variar de
acordo com as características físicas do robô e das condições do meio
ambiente.
• Controle dos motores: ferramenta de controle independente para cada um dos
motores. Conceito básico do controle utilizado.
• Leitura do sonar: descrição dos dados recebidos do robô com base na leitura do
sensor de ultrasom.
• Interface gráfica: cálculos utilizados para representação gráfica do caminho
percorrido pelo robô, sendo:
o caminho aleatório: caminho desejado que seja percorrido pelo robô;
o caminhos pré-definidos: testes realizados com base em alguns
caminhos pré-definidos;
o caminho aproximado: caminho possível de ser percorrido pelo robô,
limitado às características físicas do robô;
o entrada manual: teste da interface gráfica.
• Cálculo dos dados recebidos e enviados: descrição detalhada dos cálculos
executados para o compilamento dos dados enviados e recebidos do robô.
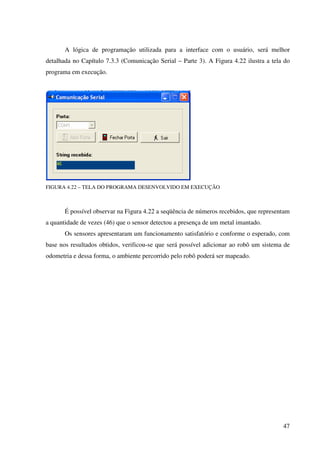
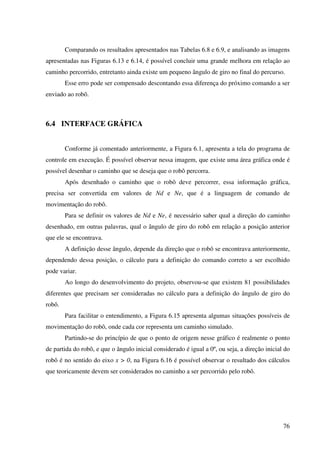
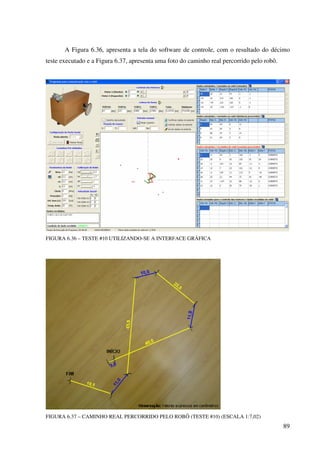
A Figura 6.1 apresenta a tela do software desenvolvido utilizado para realizar o
controle remoto do robô. Nesta figura, além dos principais módulos descritos acima, é
possível observar também, que o programa informa o tempo decorrido entre o comando
enviado e a equivalente resposta do robô (rodapé).](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-73-320.jpg)
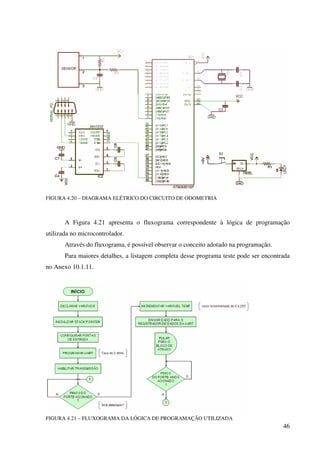
![59
INÍCIO DO BLOCO DE LEITURA DA
PORTA SERIAL E AJUSTE DO ERRO
(VR[i-1] := 4) e
(VR[i-3] := 3) e
(VR[i-5] := 2) e
(VR[i-7] := 1) e
(VR[i-8] := 204)
?
LER DADOS
DA PORTA
SERIAL
i := i + 1
VR[i] := DADO RECEBIDO
VR[i-5] + VR[i-3]
+ VR[i-1] + VR[i-8]
-VR[i-7]*4 = 210
?
VR[i-5] + VR[i-3]
+ VR[i-1] + VR[i-8]
-VR[i-7]*4 = 209
?
i := i - 9
j := 0
(VR[i] = 0) ou
(VR[i] = 204)?
(VR[i] <> 0) e
(VR[i+2] - VR[i] = 204)
?
VR[i+2] - VR[i] = 0?
CONDICAO := ‘CORRETO’ CONDICAO := ‘ERRO LEITURA’ CONDICAO := ‘ERRO ZERO’ CONDICAO := ‘ERRO -254’
FIM DO BLOCO DE LEITURA DA
PORTA SERIAL E AJUSTE DO ERRO
REFERENCIA = VR[i]
VR[i] := VR[i] - REFERENCIA
i := i + 1
j := j + 1
CONDICAO =
‘ERRO LEITURA’?
VR[i] := VR[i] - REFERENCIA + 1
i := i + 1
CONDICAO =
‘ERRO ZERO’?
VR[i] := VR[i] - REFERENCIA + 255
i := i + 1
j = 10?
S S S
NNN
N N N
SSS
i := i + 1
CONDICAO =
‘CORRETO’?
N N N
SSS
SN
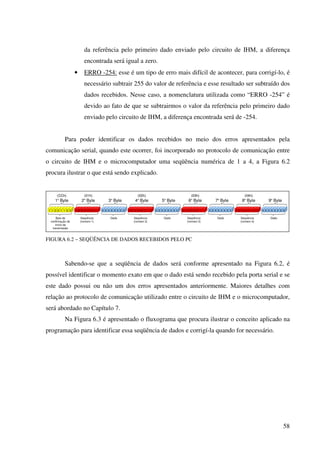
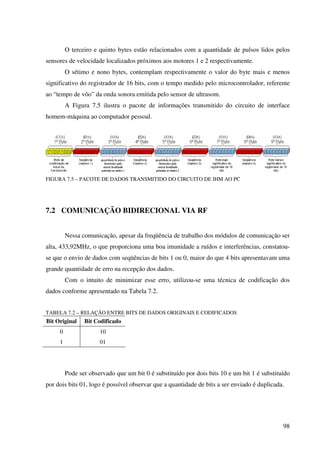
FIGURA 6.3 – FLUXOGRAMA DA LEITURA DA PORTA SERIAL E AJUSTE DO ERRO
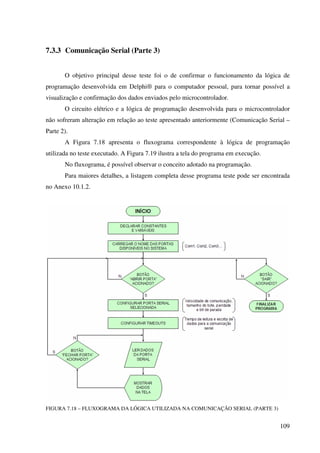
6.2 PARÂMETROS DE AJUSTE DO ROBÔ
Na Figura 6.4, são mostrados os parâmetros que podem ser ajustados para a execução
correta dos cálculos e medições com relação aos movimentos executados pelo robô.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-77-320.jpg)






![71
Contador
Valor de Referência
Saída do PWM
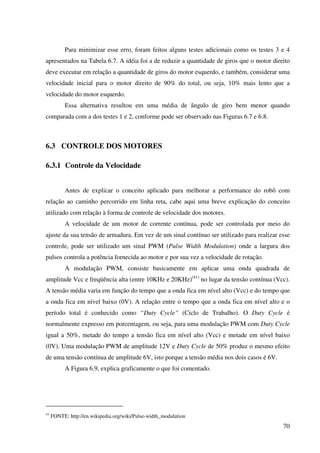
FIGURA 6.9 – VARIAÇÃO DO SINAL PWM
Neste projeto o PWM é gerado pelo próprio microcontrolador, onde um contador é
incrementado de acordo com o clock adotado para o sistema (4MHz) e é resetado no final de
cada período do PWM. Quando o valor do contador é maior que o valor da referência, a saída
do PWM muda o estado de alto para baixo [25].
A resolução do PWM adotada é de 8 bits, o que significa um valor máximo de 255 em
decimal (FFh) e a freqüência de operação é de:
KHz
MHzf
Freqüência TCK
843,7
510
4
510
===
A Figura 6.10 apresenta um exemplo de ciclo de trabalho, considerando um valor de
referência igual 50% do total (127,5 em decimal).
Ciclo de Trabalho = 50%
Velocidade = 50%
127,5 (referência)
fTCK/510
FIGURA 6.10 – EXEMPLO DE VARIAÇÃO DO SINAL PWM (50% DE CICLO DE TRABALHO)
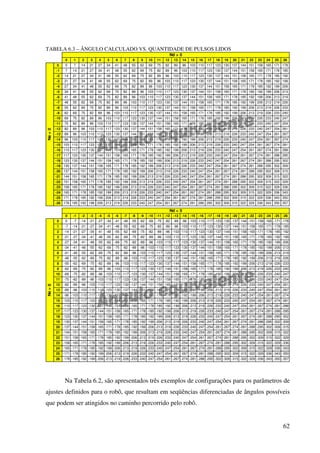
6.3.2 Controle da Quantidade de Rotações
Como explicado anteriormente, os valores de Nd e Ne são a quantidade de pulsos lidos
pelos sensores de velocidade, localizados nas rodas direita e esquerda respectivamente. Com
base nos valores de Nd e Ne, o microcontrolador consegue definir o momento exato em que o
motor deve ser desligado. O sinal recebido dos sensores de velocidade incrementam dois](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-89-320.jpg)
![73
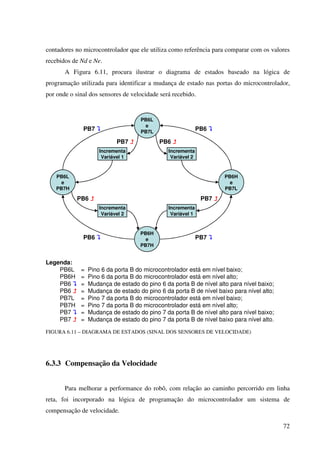
A Figura 6.12 apresenta o fluxograma dessa programação, onde é possível entender o
conceito utilizado.
FIGURA 6.12 – FLUXOGRAMA DA LÓGICA DE COMPENSAÇÃO DE VELOCIDADE
Um conceito interessante que também poderia ser aplicado no controle de velocidade,
é através do desenvolvimento de um algoritmo de controle PI (Proporcional Integral) no
microcontrolador para garantir uma melhor precisão no controle de velocidade dos motores de
corrente contínua, conforme apresentado no artigo [35].
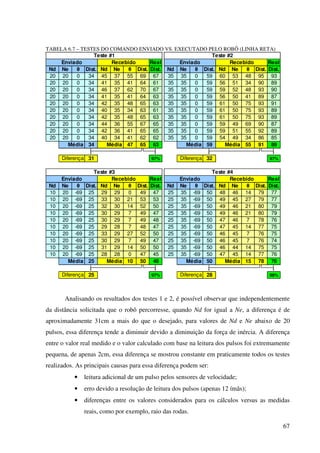
Com o objetivo de ilustrar o conceito explicado no fluxograma acima, foram
realizados oito testes, sendo quatro sem utilizar o sistema de compensação de velocidade e
quatro utilizando-o.
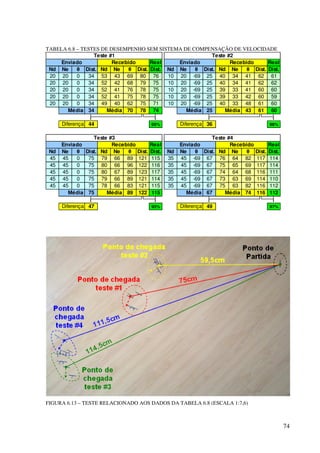
A Tabela 6.8, apresenta os resultados dos quatro testes sem a utilização do sistema de
compensação de velocidade e a Figura 6.13, mostra a imagem dos caminhos percorridos pelo
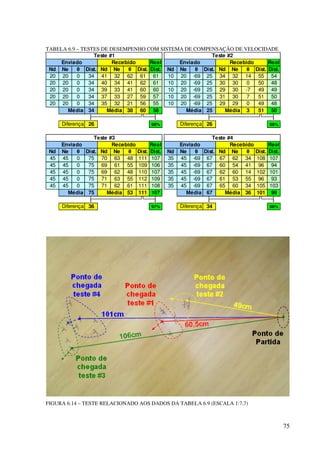
robô, relacionados com estes testes. Já a Tabela 6.9 e a Figura 6.14, apresentam os resultados
dos quatro testes utilizando o sistema de compensação de velocidade.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-91-320.jpg)
















![107
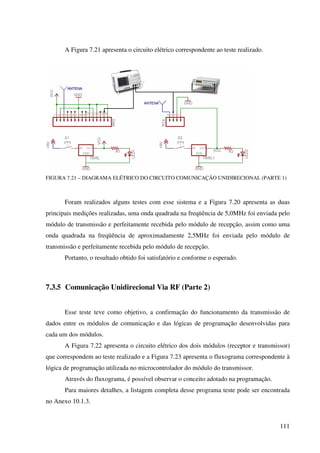
7.3.2 Comunicação Serial (Parte 2)
O objetivo principal desse teste foi o de confirmar o funcionamento do circuito elétrico
proposto e da lógica de programação desenvolvida para o microcontrolador, tornando possível
a comunicação entre o microcontrolador do circuito de transmissão/ recepção de dados para o
robô e o computador pessoal (IHM).
O teste foi realizado, utilizando-se o software RComSerial v1.1, o mesmo utilizado no
teste anterior. A Figura 7.15, apresenta o software utilizado, assim como o resultado do teste
executado.
FIGURA 7.15 – TELA DO SOFTWARE RCOMSERIAL V1.1 E O RESULTADO OBTIDO (PARTE 2)
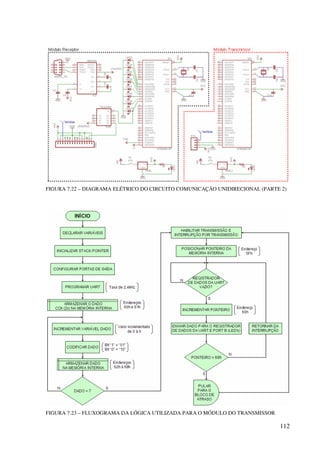
A Figura 7.16 apresenta o circuito elétrico correspondente ao teste realizado, assim
como na Figura 7.17 é apresentado o fluxograma correspondente à lógica de programação
utilizada no teste executado.
Através do fluxograma, é possível observar o conceito adotado na programação.
Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada
no Anexo 10.1.1.
-
!#$%'()*+,-
./0123456789:;=?@ABCDEFGH
IJKLMNOPQRSTUVWXYZ[]^_`
abcdefghijklmnopqrstuvwxyz{|}~
€‚ƒ„…†‡ˆ‰Š‹ŒŽ‘’“”•–—
˜™š›œžŸ ¡¢£¤¥¦§¨©ª«¬-
®¯ °±²³´µ¶·¸¹º»¼½¾¿ÀÁÂÃÄÅÆÇ
ÈÉÊËÌÍÎÏÐÑÒÓÔÕÖ×ØÙÚÛÜÝÞ
ßàáâãäåæçèéêëìíîïðñòóôõö÷øùúûüý
þÿ](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-125-320.jpg)













![137
Volta:
rjmp Volta ;Fica nele mesmo até receber uma interrupção
;** FIM DO PROGRAMA
10.1.2Programa Comunicação Serial (Parte 3)
PROGRAMA PARA COMPUTADOR PESSOAL
Título: Programa Comunicação Serial (Parte 3)
Linguagem: Delphi (Pascal)
Arquivo: CSerial.pas
Objetivo: Testar a Comunicação Serial entre o Microcontrolador e o PC
Descrição: Uma seqüência de bytes de 0 a 255 é enviada pelo microcontrolador ao PC utilizando-se a
UART e os dados são mostrados ao usuário.
unit CSerial;
interface
uses
Windows, Messages, SysUtils, Classes, Graphics, Controls, Forms, Dialogs,
StdCtrls, Menus, ExtCtrls, FileCtrl, Buttons, jpeg, Registry;
type TMultlinha = class(TThread)
private
protected
procedure Execute; override;
procedure MostraString; //Mostra dados na tela.
end;
type
TForm1 = class(TForm)
SpeedAbrirPorta: TSpeedButton;
SpeedFecharPorta: TSpeedButton;
SpeedSair: TSpeedButton;
Label2: TLabel;
Label41: TLabel;
LabelStrRecebida: TLabel;
Bevel1: TBevel;
ComboBoxPorta: TComboBox;
procedure FormCreate(Sender: TObject);
procedure SpeedAbrirPortaClick(Sender: TObject);
procedure SpeedSairClick(Sender: TObject);
procedure SpeedFecharPortaClick(Sender: TObject);
procedure FormCloseQuery(Sender: TObject; var CanClose: Boolean);
procedure MostraPortasCom(); //Mostra portas COMx.
private
{ Private declarations }
public
{ Public declarations }
end;
const
LEN_BUFFER = 100; //Tamanho dos Buffers de dados.
var
Form1: TForm1;
hCom: THANDLE; //Handle da Porta Serial (API).
dcb: TDCB; //Estrutura DCB (API).
CommTimeouts: TCOMMTIMEOUTS; //Estrutura TCOMMTIMEOUTS (API).
BytesLidos: DWORD;
BufferRecebe : array [0..LEN_BUFFER] of Integer; //Define o buffer.
GLB_Conectado:boolean; //Indica se a porta já está aberta.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-155-320.jpg)

![139
CloseHandle(hCom); //Fecha a porta Serial.
ShowMessage('Um outro programa já está usando a porta, ou a mesma não existe!');
end
else begin
SpeedAbrirPorta.Enabled := false;
SpeedFecharPorta.Enabled := true;
ComboBoxPorta.Enabled := false;
TMultlinha.Create(false); //Inicia processo.
end;
end
else begin
GLB_Conectado := false;
ShowMessage('Um outro programa já está usando a porta, ou a mesma não existe!');
end;
end;
procedure TForm1.SpeedSairClick(Sender: TObject);
begin
Close();
end;
procedure TForm1.SpeedFecharPortaClick(Sender: TObject);
begin
SpeedFecharPorta.Enabled := false;
SpeedAbrirPorta.Enabled := true;
ComboBoxPorta.Enabled := true;
GLB_Conectado := false;
CloseHandle(hCom); //Fecha a porta serial.
end;
//Mostra os nomes das portas COM instaladas no sistema num ComboBox.
procedure TForm1.MostraPortasCom();
var
Registro: TRegistry; //Para trabalhar com os Registros do windows.
Lista: Tstrings;
indice: Integer; //Para incrementar.
begin
Registro := TRegistry.Create; //Cria e aloca espaço na memória para o objeto.
try
Registro.RootKey := HKEY_LOCAL_MACHINE; //Define chave raiz.
Registro.OpenKey('hardwaredevicemapserialcomm', False); //Abre a chave.
Lista := TstringList.Create;
try
//Obtém uma string contendo todos os nomes de valores associados com a chave atual.
Registro.GetValueNames(Lista);
//Pega os nomes das portas.
for indice := 0 to Lista.Count - 1 do //Count é a quantidade de portas existentes.
ComboBoxPorta.Items.Add(Registro.ReadString( Lista.Strings[indice] ));
//Adiciona os nomes das portas no ComboBox1.
if ComboBoxPorta.Items.Count 0 then
ComboBoxPorta.ItemIndex := 0; //Para exibir o nome da porta.
finally
Lista.Free;
end;
Registro.CloseKey;
finally
Registro.Free;
end;
end;
//Mostra dados de forma sincronizada.
procedure TMultlinha.MostraString;
begin
Form1.LabelStrRecebida.Caption := VRecebido;
end;
//Trata a Porta Serial.
procedure TMultlinha.Execute;
var
cont:DWORD;
StrMens:AnsiString;
tama:integer;
begin
while not Terminated do //loop infinito. Vida do programa.
begin](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-157-320.jpg)
![140
if GLB_Conectado = true then //Se a porta serial foi aberta corretamente.
begin
BytesLidos := 0;
cont := 0;
if Readfile(hCom, BufferRecebe[cont], LEN_BUFFER, BytesLidos, nil) then //Lê a porta Serial.
VRecebido:=IntToStr(BufferRecebe[Cont]);
if BytesLidos 0 then //Se algum caracter foi lido.
begin
while cont BytesLidos do //Enquanto há caracteres a serem lidos.
begin
Synchronize(MostraString); //Mostra dados na tela.
cont := cont + 1;
end; //Fim Do while 2.
end;
end
else begin
Sleep(1); //Para não travar o processo.
end;
end; //Fim Do while 1.
end;
procedure TForm1.FormCloseQuery(Sender: TObject; var CanClose: Boolean);
begin
if(GLB_Conectado = true) then
CloseHandle(hCom);
end;
end.
//FIM DO PROGRAMA
10.1.3Programa Comunicação Unidirecional Via RF (Transmissor)
PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5
Título: Programa Comunicação Unidirecional Via RF (Parte 2)
Módulo: Transmissão
Linguagem: Assembler
Arquivo: CUniT_P2.asm
Objetivo: Testar a Comunicação por meio de RF entre os Módulos de Comunicação
Descrição: Uma seqüência de 9 bytes deve ser enviada através da UART sendo:
Bytes 1 e 2: CCh (Identificação de Protocolo)
Bytes 3 a 9: Dados Codificados (Seqüência numérica de 0 à 6)
Lembrando que: 1 = 01 (Codificado)
0 = 10 (Codificado)
.include 8515def.inc
;** Declaração das Variáveis
.def temp = r16
.def desloc = r17
.def desloc1 = r18
.def desloc2 = r19
.def dado = r20
.def count = r21
.def temp1 = r22
.def temp2 = r23
.def temp3 = r24
.def final = r25
rjmp RESET ;Pula para o Programa Principal
.org UDREaddr ;UART Data Register Empty Interrupt Vector Address
inc XL ;Posiciona o ponteiro](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-158-320.jpg)












![153
procedure FormCreate(Sender: TObject);
procedure SpeedAbrirPortaClick(Sender: TObject);
procedure SpeedSairClick(Sender: TObject);
procedure SpeedFecharPortaClick(Sender: TObject);
procedure FormCloseQuery(Sender: TObject; var CanClose: Boolean);
procedure MostraPortasCom();
procedure Button1Click(Sender: TObject);
procedure BotaodeTesteClick(Sender: TObject);
procedure ScrollBarM2Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);
procedure BotaoEsquerdaM12Click(Sender: TObject);
procedure BotaoEnviaM12Click(Sender: TObject);
procedure BotaoEnviaTesteClick(Sender: TObject);
procedure BotaoEnviaM1Click(Sender: TObject);
procedure BotaoEnviaM2Click(Sender: TObject);
procedure BotaoFrenteM12Click(Sender: TObject);
procedure BotaoDireitaM12Click(Sender: TObject);
procedure BotaoPraTrasM12Click(Sender: TObject);
procedure BotaoParaM12Click(Sender: TObject);
procedure BotaoFrenteM1Click(Sender: TObject);
procedure BotaoPraTrasM1Click(Sender: TObject);
procedure BotaoFrenteM2Click(Sender: TObject);
procedure BotaoPraTrasM2Click(Sender: TObject);
procedure ScrollBarM1Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);
procedure ScrollBarM12Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);
procedure BotaoAceleraM12Click(Sender: TObject);
private
{ Private declarations }
public
{ Public declarations }
end;
const
LEN_BUFFER = 100; //Tamanho dos Buffers de dados.
var
Form1: TForm1;
hCom: THANDLE; //Handle da Porta Serial (API).
dcb: TDCB; //Estrutura DCB (API).
CommTimeouts: TCOMMTIMEOUTS; //Estrutura TCOMMTIMEOUTS(API).
BytesLidos: DWORD;
BytesEscritos: DWORD;
BufferRecebe : array [0..LEN_BUFFER] of Integer; //Define o buffer.
GLB_Conectado:boolean; //Indica se a porta já está aberta.
GLBEnviaDados:bool; //Para habilitar/desabilitar o envio de dados pela serial.
VRecebido: String;
Acesso: Integer;
D_Sent: array [0..90] of Byte;
Implementation
…(Conteúdo idêntico ao apresentado no Anexo 15.1.2)…
…continuação:
procedure TForm1.FormCloseQuery(Sender: TObject; var CanClose: Boolean);
begin
if(GLB_Conectado = true) then
CloseHandle(hCom);
end;
procedure TForm1.Button1Click(Sender: TObject);
begin
Form1.Memo1.Clear
end;
procedure TForm1.BotaodeTesteClick(Sender: TObject);
begin
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
if Acesso = 0 then
begin
Add('11000000b - 192d - C0h');](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-171-320.jpg)
![154
D_Sent[3]:=192;
end;
if Acesso = 1 then
begin
Add('11000001b - 193d - C1h');
D_Sent[3]:=193;
end;
if Acesso = 2 then
begin
Add('11000010b - 194d - C2h');
D_Sent[3]:=194;
end;
if Acesso = 3 then
begin
Add('11000011b - 195d - C3h');
D_Sent[3]:=195;
end;
if Acesso = 4 then
begin
Add('11000100b - 196d - C4h');
D_Sent[3]:=196;
end;
if Acesso = 5 then
begin
Add('11000101b - 197d - C5h');
D_Sent[3]:=197;
end;
if Acesso = 6 then
begin
Add('11000110b - 198d - C6h');
D_Sent[3]:=198;
end;
if Acesso = 7 then
begin
Add('11000111b - 199d - C7h');
D_Sent[3]:=199;
end;
if Acesso = 8 then
begin
Add('11001000b - 200d - C8h');
D_Sent[3]:=200;
end;
if Acesso = 9 then
begin
Add('11001001b - 201d - C9h');
D_Sent[3]:=201;
end;
if Acesso = 10 then
begin
Add('11001010b - 202d - CAh');
D_Sent[3]:=202;
end;
if Acesso = 11 then
begin
Add('11001011b - 203d - CBh');
D_Sent[3]:=203;
end;
if Acesso = 12 then
begin
Add('11001100b - 204d - CCh');
D_Sent[3]:=204;
end;
if Acesso = 13 then
begin
Add('11001101b - 205d - CDh');
D_Sent[3]:=205;
end;
if Acesso = 14 then
begin
Add('11001110b - 206d - CEh');
D_Sent[3]:=206;
end;
if Acesso = 15 then
begin
Add('11001111b - 207d - CFh');
D_Sent[3]:=207;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-172-320.jpg)
![155
Acesso:=-1;
end;
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[4]:=0;
D_Sent[5]:=0;
Acesso:=Acesso+1;
End;
end;
procedure TForm1.BotaoEsquerdaM12Click(Sender: TObject);
begin
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[3]:=200;
D_Sent[4]:=0;
D_Sent[5]:=0;
Form1.ScrollBarM12.Position:=D_Sent[4];
Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position);
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
Add('11001000b - 200d - C8h');
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
end;
end;
procedure TForm1.BotaoEnviaM12Click(Sender: TObject);
begin
D_Sent[4]:=Form1.ScrollBarM12.Position;
D_Sent[5]:=Form1.ScrollBarM12.Position;
WriteFile( hCom,D_Sent,6, BytesEscritos, nil); //Envia string.
end;
procedure TForm1.BotaoEnviaTesteClick(Sender: TObject);
begin
WriteFile( hCom,D_Sent,6, BytesEscritos, nil); //Envia string.
end;
procedure TForm1.BotaoEnviaM1Click(Sender: TObject);
begin
D_Sent[4]:=Form1.ScrollBarM1.Position;
WriteFile( hCom,D_Sent,6, BytesEscritos, nil); //Envia string.
end;
procedure TForm1.BotaoEnviaM2Click(Sender: TObject);
begin
D_Sent[5]:=Form1.ScrollBarM2.Position;
WriteFile( hCom,D_Sent,6, BytesEscritos, nil); //Envia string.
end;
procedure TForm1.BotaoFrenteM12Click(Sender: TObject);
begin
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[3]:=201;
D_Sent[4]:=0;
D_Sent[5]:=0;
Form1.ScrollBarM12.Position:=D_Sent[4];
Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position);
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
Add('11001001b - 201d - C9h');
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
end;
end;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-173-320.jpg)
![156
procedure TForm1.BotaoDireitaM12Click(Sender: TObject);
begin
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[3]:=193;
D_Sent[4]:=0;
D_Sent[5]:=0;
Form1.ScrollBarM12.Position:=D_Sent[4];
Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position);
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
Add('11000001b - 193d - C1h');
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
end;
end;
procedure TForm1.BotaoPraTrasM12Click(Sender: TObject);
begin
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[3]:=198;
D_Sent[4]:=0;
D_Sent[5]:=0;
Form1.ScrollBarM12.Position:=D_Sent[4];
Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position);
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
Add('11000110b - 198d - C6h');
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
end;
end;
procedure TForm1.BotaoParaM12Click(Sender: TObject);
begin
Memo1.Clear;
Form1.ScrollBarM12.Position:=255;
Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position);
end;
procedure TForm1.BotaoFrenteM1Click(Sender: TObject);
begin
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[3]:=193;
D_Sent[4]:=0;
D_Sent[5]:=0;
Form1.ScrollBarM1.Position:=D_Sent[4];
Form1.EditM1.Text:=IntToStr(Form1.ScrollBarM1.Position);
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
Add('11000001b - 193d - C1h');
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
end;
end;
procedure TForm1.BotaoPraTrasM1Click(Sender: TObject);
begin
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[3]:=194;
D_Sent[4]:=0;
D_Sent[5]:=0;
Form1.ScrollBarM1.Position:=D_Sent[4];
Form1.EditM1.Text:=IntToStr(Form1.ScrollBarM1.Position);](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-174-320.jpg)
![157
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
Add('11000010b - 194d - C2h');
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
end;
end;
procedure TForm1.BotaoFrenteM2Click(Sender: TObject);
begin
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[3]:=200;
D_Sent[4]:=0;
D_Sent[5]:=0;
Form1.ScrollBarM2.Position:=D_Sent[5];
Form1.EditM2.Text:=IntToStr(Form1.ScrollBarM2.Position);
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
Add('11001000b - 200d - C8h');
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
end;
end;
procedure TForm1.BotaoPraTrasM2Click(Sender: TObject);
begin
D_Sent[1]:=204;
D_Sent[2]:=204;
D_Sent[3]:=196;
D_Sent[4]:=0;
D_Sent[5]:=0;
Form1.ScrollBarM2.Position:=D_Sent[5];
Form1.EditM2.Text:=IntToStr(Form1.ScrollBarM2.Position);
Memo1.Clear;
with Memo1.Lines do
begin
Add('11001100b - 204d - CCh');
Add('11001100b - 204d - CCh');
Add('11000100b - 196d - C4h');
Add('00000000b - 000d - 00h');
Add('00000000b - 000d - 00h');
end;
end;
procedure TForm1.ScrollBarM12Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);
begin
Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position);
end;
procedure TForm1.ScrollBarM1Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);
begin
Form1.EditM1.Text:=IntToStr(Form1.ScrollBarM1.Position);
end;
procedure TForm1.ScrollBarM2Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);
begin
Form1.EditM2.Text:=IntToStr(Form1.ScrollBarM2.Position);
end;
procedure TForm1.BotaoAceleraM12Click(Sender: TObject);
begin
Memo1.Clear;
Form1.ScrollBarM12.Position:=Form1.ScrollBarM12.Position-1;
Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position);
D_Sent[4]:=Form1.ScrollBarM12.Position;
D_Sent[5]:=Form1.ScrollBarM12.Position;
end;
end.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-175-320.jpg)













![173
Hora, Min, Sec, MSec : Word;
GLB_Conectado: boolean; //Indica se a porta já está aberta.
GLBEnviaDados: bool; //Para habilitar/desabilitar o envio de dados pela serial.
VRecebido,Condicao,TempodeEnvio,Habilita: String;
Origem_dado,Confirmar_Dados_Novamente,Solicitar_Dados_Novamente: string;
BufferRecebe : array [0..LEN_BUFFER] of Integer; //Define o buffer.
D_Sent: array [0..90] of Byte;
VRecebido_Convertido: array [0..100000] of String;
Enviado_Robo: array [0..10,0..2] of Integer;
Porcentagem_Ajuste: array[1..10] of real;
Nd, Ne, N1, Nd_Real, Ne_Real, Nd_Aproximado, Ne_Aproximado: Integer;
Acesso,Leitura,Ponteiro,c,l,X_Anterior_Real2,Y_Anterior_Real2: Integer;
X_Anterior_Real,Y_Anterior_Real,X_Anterior_Aproximado,Y_Anterior_Aproximado: Integer;
Nres,Lr,Desenho,Sonar,Acumulador,X_Obstaculo,Y_Obstaculo: Integer;
Teta_Possivel,Nd_Possivel,Ne_Possivel: array [0..100] of Real;
rd, re, Teta_Final, Menor_Diferenca,Teta_Acumulado,Teta_Acumulado2: Real;
Teta,Teta_Real,Teta_Anterior,Teta_Anterior_Real,Alfa,Alfa_Anterior,X: Real;
X_Anterior,X_Anterior2,Y,Y_Anterior,Y_Anterior2,Hipotenusa,Distancia: Real;
Teta_Aproximado,Teta_Anterior_Aproximado,Teta_Anterior_Real2,Distancia_Obstaculo: Real;
X_Real,Y_Real,X_Aproximado,Y_Aproximado,Tvoo,Timer,Vel_Som,Temp_amb: Real;
Ajuste_Nd_Teta,Ajuste_Ne_Teta,Teta_Ajuste_Real,Ajuste_Linha_Reta: Real;
Tempo,Tempo_Inicio,Tempo_Fim: TDateTime;
implementation
{$R *.DFM}
//Abre a porta serial especificada.
function AbrirPorta(NomePorta:String):boolean;
begin
hCom := CreateFile(
PChar(NomePorta),
GENERIC_READ or GENERIC_WRITE,
0, //Dispositivos COM abertos com acesso exclusivo.
nil, //Sem atributos de segurança.
OPEN_EXISTING, //deve usar OPEN_EXISTING.
0, //Entrada e saída sem overlap.
0 //Deve ser NULL para COM.
);
if(hCom = INVALID_HANDLE_VALUE) then result := false //Se houve algum erro ao abrir a porta.
else result:= true;
end;
//Define TIMEOUTs.
Function ConfiguraTimeOuts:boolean;
begin
if not GetCommTimeouts(hCom, CommTimeouts) then result:= false;
CommTimeouts.ReadIntervalTimeout := 2;
CommTimeouts.ReadTotalTimeoutMultiplier := 0;
CommTimeouts.ReadTotalTimeoutConstant := 2;
CommTimeouts.WriteTotalTimeoutMultiplier := 5;
CommTimeouts.WriteTotalTimeoutConstant := 5;
if not SetCommTimeouts(hCom, CommTimeouts) then result:= false
else result:= true;
end;
//Configura porta serial.
Function ConfiguraControle:boolean;
begin
if not GetCommState(hCom, dcb) then result:= false;
dcb.BaudRate := CBR_2400; //define velocidade em bps.
dcb.ByteSize := 8; //define bits de dados.
dcb.Parity := NOPARITY; //define paridade
dcb.StopBits := ONESTOPBIT; //define stop bit.
if not SetCommState(hCom, dcb) then result:= false
else result:= true;
end;
//Função criada para converter um número hexadecimal para decimal.
Function HexToInt(const HexStr: string): longint;
var
iNdx: integer;
cTmp: char;
begin
result := 0;
for iNdx := 1 to Length(HexStr) do](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-191-320.jpg)
![174
begin
cTmp := HexStr[iNdx];
case cTmp of
'0'..'9': Result := 16 * Result + (Ord(cTmp) - $30);
'A'..'F': Result := 16 * Result + (Ord(cTmp) - $37);
'a'..'f': Result := 16 * Result + (Ord(cTmp) - $57);
else
raise EConvertError.Create('Caractere ilegal na string.');
end;
end;
end;
//Função para calcular o tempo de execução do programa e demora no tempo de resposta do robô.
Function fExecutando(N:TDateTime):String;
var
Tempo_final: TDateTime;
begin
Tempo_final := Time;
if TempodeEnvio = 'True' then
begin
TempodeEnvio := 'False';
DecodeTime(Tempo_final-N, Hora, Min, Sec, MSec);
Result := Floattostr((Msec + (Sec * 1000) + (Min * 60000) + (Hora * 3600000))/1000);
end
Else
Result := TimeToStr(Tempo_final-N);
end;
//Procedimento de inicialização do programa.
procedure TForm1.FormCreate(Sender: TObject);
var
i,j: integer;
temp1,temp2,temp3,temp4,temp5,temp6: real;
begin
Tempo := Time; //Armazena a hora atual.
//Inicializa variáveis Globais.
GLB_Conectado := false; //Indica se a porta já está aberta.
GLBEnviaDados := false; //Para habilitar/desabilitar o envio de dados pela porta serial.
MostraPortasCom; //Carrega os nomes das portas COM num FilterComboBox.
Form1.SpeedButton10.Enabled := False;
Form1.SpeedButton11.Enabled := False;
Form1.SpeedButton12.Enabled := False;
Form1.SpeedButton13.Enabled := False;
Form1.SpeedButton14.Enabled := False;
Form1.SpeedButton15.Enabled := False;
Form1.SpeedButton16.Enabled := False;
Form1.SpeedButton17.Enabled := False;
Form1.SpeedButton18.Enabled := False;
Form1.SpeedButton19.Enabled := False;
Form1.SpeedButton6.Enabled := False;
Form1.SpeedButton30.Enabled := False;
Form1.SpeedButton31.Enabled := False;
Form1.SpeedButton33.Enabled := False;
Form1.SpeedButton34.Enabled := False;
Form1.SpeedButton35.Enabled := False;
Form1.SpeedButton36.Enabled := False;
Form1.SpeedButton37.Enabled := False;
Form1.SpeedButton38.Enabled := False;
Form1.SpeedButton39.Enabled := False;
Form1.SpeedButton40.Enabled := False;
Form1.SpeedElastica.Enabled := False;
Form1.SpeedButton41.Click; //Chama procedimento para ajustar os valores com base nos parâmetros de ajuste do robô.
end;
//Procedimento de abertura da porta serial.
procedure TForm1.SpeedAbrirPortaClick(Sender: TObject);
var
Sucesso: Boolean;
begin
if AbrirPorta(ComboBoxPorta.Text) = true then //Abre a porta serial.
begin
GLB_Conectado := true;
Sucesso := ConfiguraControle();
Sucesso := ConfiguraTimeOuts();
if Sucesso = false then
begin](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-192-320.jpg)
![175
GLB_Conectado := false;
CloseHandle(hCom); //Fecha a porta Serial.
ShowMessage('Um outro programa já está usando a porta, ou a mesma não existe!');
end
else
begin
Form1.Label2.Caption := ' Porta aberta:';
SpeedAbrirPorta.Enabled := false;
SpeedFecharPorta.Enabled := true;
ComboBoxPorta.Enabled := false;
TMultlinha.Create(false); //Inicia processo.
end;
end
else
begin
GLB_Conectado := false;
ShowMessage('Um outro programa já está usando a porta, ou a mesma não existe!');
end;
end;
//Procedimento para fechar a porta serial.
procedure TForm1.SpeedFecharPortaClick(Sender: TObject);
begin
Form1.Label2.Caption := 'Portas disponíveis:';
SpeedFecharPorta.Enabled := false;
SpeedAbrirPorta.Enabled := true;
ComboBoxPorta.Enabled := true;
GLB_Conectado := false;
CloseHandle(hCom); //Fecha a porta serial.
end;
//Mostra os nomes das portas COM instaladas no sistema num ComboBox.
procedure TForm1.MostraPortasCom();
var
Registro: TRegistry; //Para trabalhar com os Registros do windows.
Lista: Tstrings;
indice: Integer; //Para incrementar.
begin
Registro := TRegistry.Create; //Cria e aloca espaço na memória para o objeto.
try
Registro.RootKey := HKEY_LOCAL_MACHINE; //Define chave raiz.
Registro.OpenKey('hardwaredevicemapserialcomm', False); //Abre a chave.
Lista := TstringList.Create;
try
//Obtém uma string contendo todos os nomes de valores associados com a chave atual.
Registro.GetValueNames(Lista);
//Pega nos nomes das portas.
for indice := 0 to Lista.Count - 1 do //Count é a quantidade de portas existentes.
ComboBoxPorta.Items.Add(Registro.ReadString( Lista.Strings[indice] ));
//Adiciona os nomes das portas no ComboBox1.
if ComboBoxPorta.Items.Count 0 then
ComboBoxPorta.ItemIndex := 0; //Para exibir o nome da porta.
finally
Lista.Free;
end;
Registro.CloseKey;
finally
Registro.Free;
end;
end;
//Mostra dados de forma sincronizada.
procedure TMultlinha.MostraString;
var
i,cont:integer;
begin
Ponteiro := Ponteiro + 1;
VRecebido_Convertido[Ponteiro]:= VRecebido;
Form1.Memo1.Text := Form1.Memo1.Text + ' ' + VRecebido;
//Seqüência lógica para mostrar automaticamente os dados recebidos
if Ponteiro 9 then
begin
If (((StrtoInt(VRecebido_Convertido[Ponteiro-3]) = 3) and (StrtoInt(VRecebido_Convertido[Ponteiro-1]) =
4) and (StrtoInt(VRecebido_Convertido[Ponteiro-5]) = 2) and (StrtoInt(VRecebido_Convertido[Ponteiro
7]) = 1) and (StrtoInt(VRecebido_Convertido[Ponteiro-8]) = 204)) or (StrtoInt(VRecebido_Convertido[Ponteiro-5]) -
StrtoInt(VRecebido_Convertido[Ponteiro-7])*4 + StrtoInt(VRecebido_Convertido[Ponteiro-3]) +](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-193-320.jpg)
![176
StrtoInt(VRecebido_Convertido[Ponteiro-1]) + StrtoInt(VRecebido_Convertido[Ponteiro-8]) = 210) or
(StrtoInt(VRecebido_Convertido[Ponteiro-5]) - StrtoInt(VRecebido_Convertido[Ponteiro-7])*4 +
StrtoInt(VRecebido_Convertido[Ponteiro-3]) + StrtoInt(VRecebido_Convertido[Ponteiro-1]) +
StrtoInt(VRecebido_Convertido[Ponteiro-8]) = 209)) then
begin
//Seqüência lógica para mostrar o tempo de envio/ recebimento dos dados do robô.
TempodeEnvio := 'True';
Form1.StatusBar1.Panels[2].Text:= 'Último dado recebido do robô em: '+fExecutando(Tempo_Inicio)+ 's';
Form1.StatusBar1.Panels[1].Text := 'DADO RECEBIDO';
//Seqüência para desabilitar o botão que enviou o dado.
Case Desenho of
1: begin
Form1.SpeedButton10.Enabled := False;
Form1.SpeedButton16.Enabled := True;
end;
2: begin
Form1.SpeedButton16.Enabled := False;
if l 2 then Form1.SpeedButton11.Enabled := True;
Habilita := 'False';
end;
3: begin
Form1.SpeedButton11.Enabled := False;
Form1.SpeedButton17.Enabled := True;
end;
4: begin
Form1.SpeedButton17.Enabled := False;
if l 3 then Form1.SpeedButton12.Enabled := True;
Habilita := 'False';
end;
5: begin
Form1.SpeedButton12.Enabled := False;
Form1.SpeedButton18.Enabled := True;
end;
6: begin
Form1.SpeedButton18.Enabled := False;
if l 4 then Form1.SpeedButton13.Enabled := True;
Habilita := 'False';
end;
7: begin
Form1.SpeedButton13.Enabled := False;
Form1.SpeedButton19.Enabled := True;
end;
8: begin
Form1.SpeedButton19.Enabled := False;
if l 5 then Form1.SpeedButton14.Enabled := True;
Habilita := 'False';
end;
9: begin
Form1.SpeedButton14.Enabled := False;
Form1.SpeedButton15.Enabled := True;
end;
10: begin
Form1.SpeedButton15.Enabled := False;
end;
end;
//Verifica se está apenas recebendo os dados recebidos anteriormente.
if Confirmar_Dados_Novamente = 'True' then
begin
X_Anterior_Real := X_Anterior_Real2;
Y_Anterior_Real := Y_Anterior_Real2;
Teta_Anterior_Real := Teta_Anterior_Real2;
Form1.Image1.Picture.LoadFromFile('C:General FilesEstudosEm desenvolvimentoImagem_Anterior.bmp');
Confirmar_Dados_Novamente := 'False';
end;
if Solicitar_Dados_Novamente = 'True' then
begin
Form1.Image1.Picture.LoadFromFile('C:General FilesEstudosEm desenvolvimentoImagem_Atual.bmp');
Solicitar_Dados_Novamente := 'False';
end;
Form1.Image1.Picture.SaveToFile('C:General FilesEstudosEm desenvolvimentoImagem_Anterior.bmp');
Form1.Button2.Click;
if (Desenho 0) and (Sonar = 0) then
begin
Form1.StringGrid4.Cells[1,Desenho] := VRecebido_Convertido[Ponteiro-6];
Form1.StringGrid4.Cells[2,Desenho] := VRecebido_Convertido[Ponteiro-4];
Form1.Edit10.Text := VRecebido_Convertido[Ponteiro];](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-194-320.jpg)
![177
Form1.Edit11.Text := VRecebido_Convertido[Ponteiro-2];
end;
with Form1.Image1 do
begin
if (Desenho 0) and (Sonar = 0) and (Trunc(Desenho/2) Desenho/2) then
begin
Acumulador := Acumulador + 1;
if StrtoInt(Form1.StringGrid1.Cells[5,Acumulador]) 0 then
Nd_Real := StrtoInt(Form1.StringGrid4.Cells[1,Desenho])
else
begin
Nd_Real := -StrtoInt(Form1.StringGrid4.Cells[1,Desenho]);
Form1.StringGrid4.Cells[1,Desenho] := '-' + Form1.StringGrid4.Cells[1,Desenho];
end;
if StrtoInt(Form1.StringGrid1.Cells[6,Acumulador]) 0 then
Ne_Real := StrtoInt(Form1.StringGrid4.Cells[2,Desenho])
else
begin
Ne_Real := -StrtoInt(Form1.StringGrid4.Cells[2,Desenho]);
Form1.StringGrid4.Cells[2,Desenho] := '-' + Form1.StringGrid4.Cells[2,Desenho];
end;
end;
if (Desenho 0) and (Sonar = 0) and (Trunc(Desenho/2) = Desenho/2) then
begin
Nd_Real := StrtoInt(Form1.StringGrid4.Cells[1,Desenho]);
Ne_Real := Round(StrtoInt(Form1.StringGrid4.Cells[2,Desenho]));
end;
if (Desenho = 0) and (Sonar = 0) then
begin
Nd_Real := StrtoInt(VRecebido_Convertido[Ponteiro-6]);
Ne_Real := StrtoInt(VRecebido_Convertido[Ponteiro-4]);
Form1.Edit10.Text := VRecebido_Convertido[Ponteiro];
Form1.Edit11.Text := VRecebido_Convertido[Ponteiro-2];
end;
if Origem_dado = 'Controle dos Motores' then
begin
if StrtoInt(Form1.StringGrid3.Cells[1,l-1]) 0 then
Nd_Real := -Nd_Real;
if StrtoInt(Form1.StringGrid3.Cells[2,l-1]) 0 then
Ne_Real := -Ne_Real;
end;
if Sonar = 0 then
begin
Teta_Real := ((2*PI/(Lr*Nres))*(Nd_Real*rd-Ne_Real*re))*Teta_Ajuste_Real+Teta_Anterior_Real;
if (Nd_Real 0) and (Ne_Real 0) then
begin
//O ângulo considerado é o anterior, pois só existe desvio no final, onde o ângulo adicional é considerado
X_Real := (Nd_Real*rd+Ne_Real*re)*PI*Cos(Teta_Anterior_Real)/Nres+X_Anterior_Real;
Y_Real := (Nd_Real*rd+Ne_Real*re)*PI*Sin(Teta_Anterior_Real)/Nres+Y_Anterior_Real;
end
else
begin
X_Real := (Nd_Real*rd+Ne_Real*re)*PI*Cos(Teta_Real)/Nres+X_Anterior_Real;
Y_Real := (Nd_Real*rd+Ne_Real*re)*PI*Sin(Teta_Real)/Nres+Y_Anterior_Real;
end;
//Seqüência que calcula a distância do obstáculo detectado pelo robô.
Form1.Edit19.Text := InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2);
Form1.Edit20.Text := InttoStr(HextoInt(InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2)));
Timer := HextoInt((InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2)));
Tvoo := Timer*Pre_scaler/Relogio; //Tempo de vôo em segundos.
Form1.Edit12.Text := FloattoStr(Tvoo*1000);
Distancia_Obstaculo := Vel_som*Tvoo*100/2; //Distância em centímetros.
Form1.Edit18.Text := FloattoStr(Distancia_Obstaculo);
//Seqüência que verifica em qual planilha deve ser mostrado o dado recebido.
if Origem_dado = 'Controle dos Motores' then
begin
Form1.StringGrid3.Cells[1,l] := InttoStr(Nd_Real);
Form1.StringGrid3.Cells[2,l] := InttoStr(Ne_Real);
Form1.StringGrid3.Cells[3,l] := FloattoStr(Round(RadtoDeg(Teta_Real)));
Form1.StringGrid3.Cells[4,l] := InttoStr(Round(Sqrt(Sqr(X_Real-X_Anterior_Real)+Sqr(Y_Real-Y_Anterior_Real))));
Form1.StringGrid3.Cells[5,l] := InttoStr(Round(Distancia_Obstaculo));
Form1.StringGrid3.Cells[6,l] := FloattoStr(Round(X_Real-X_Anterior_Real));
Form1.StringGrid3.Cells[7,l] := FloattoStr(Round(Y_Real-Y_Anterior_Real));
Form1.StringGrid3.Cells[8,l] := Condicao;
end
else](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-195-320.jpg)
![178
begin
Form1.StringGrid4.Cells[1,Desenho] := InttoStr(Nd_Real);
Form1.StringGrid4.Cells[2,Desenho] := InttoStr(Ne_Real);
Form1.StringGrid4.Cells[3,Desenho] := FloattoStr(Round(RadtoDeg(Teta_Real-Teta_Anterior_Real)));
Form1.StringGrid4.Cells[4,Desenho] := FloattoStr(Round(Sqrt(Sqr(X_Real-X_Anterior_Real)+Sqr(Y_Real-
Y_Anterior_Real))));
Form1.StringGrid4.Cells[5,Desenho] := InttoStr(Round(Distancia_Obstaculo));
Form1.StringGrid4.Cells[6,Desenho] := FloattoStr(Round(X_Real-X_Anterior_Real));
Form1.StringGrid4.Cells[7,Desenho] := FloattoStr(Round(Y_Real-Y_Anterior_Real));
Form1.StringGrid4.Cells[8,Desenho] := Condicao;
end;
//Plota o caminho percorrido pelo robô.
Canvas.Pen.Width := 2;
Canvas.Pen.Color := clRed;
Canvas.MoveTo(X_Anterior_Real+250, -Y_Anterior_Real+500-250);
Canvas.LineTo(Round(X_Real+250), Round(-Y_Real+500-250)); //desenha a nova linha
X_Anterior_Real2 := X_Anterior_Real;
Y_Anterior_Real2 := Y_Anterior_Real;
Teta_Anterior_Real2 := Teta_Anterior_Real;
X_Anterior_Real := Round(X_Real);
Y_Anterior_Real := Round(Y_Real);
Teta_Anterior_Real := Teta_Real;
Ponteiro := 0;
Origem_dado := '';
//Cálculo da posição do obstáculo no espaço X e Y.
if Form1.SpeedButton29.Enabled = False then
begin
Teta_Acumulado2 := RadtoDeg(Teta_Real-Teta_Anterior_Real2) + Teta_Acumulado2;
Teta_Acumulado := Abs(Teta_Acumulado2);
X_Obstaculo := Round(Sqrt(Sqr(Distancia_Obstaculo)/(1+Sqr(Tan(Teta_Real)))));
Y_Obstaculo := Round(X_Obstaculo*Tan(Teta_Real));
while Teta_Acumulado 360 do
Teta_Acumulado := Teta_Acumulado - 360;
if (Teta_Acumulado 180) and (Teta_Acumulado 270) then
begin
X_Obstaculo := -X_Obstaculo;
Y_Obstaculo := -Y_Obstaculo;
end;
if (Teta_Acumulado 90) and (Teta_Acumulado 180) then
begin
X_Obstaculo := -X_Obstaculo;
Y_Obstaculo := -Y_Obstaculo;
end;
if (Teta_Acumulado 0) and (Teta_Acumulado 90) then
begin
X_Obstaculo := X_Obstaculo;
Y_Obstaculo := Y_Obstaculo;
end;
if (Teta_Acumulado 270) and (Teta_Acumulado 360) then
begin
X_Obstaculo := X_Obstaculo;
Y_Obstaculo := Y_Obstaculo;
end;
Form1.Image1.Canvas.MoveTo(Round(X_Real)+250+X_Obstaculo,-Round(Y_Real)+500-250-Y_Obstaculo);
Form1.Image1.Canvas.Ellipse(Round(X_Real)+250+X_Obstaculo-2,-Round(Y_Real)+500-250-Y_Obstaculo-
2,Round(X_Real)+250+X_Obstaculo+2,-Round(Y_Real)+500-250-Y_Obstaculo+2);
end;
Form1.Image1.Picture.SaveToFile('C:General FilesEstudosEm desenvolvimentoImagem_Atual.bmp');
end;
end;
if Sonar = 1 then
begin
Sonar := 0;
Form1.Edit10.Text := VRecebido_Convertido[Ponteiro];
Form1.Edit11.Text := VRecebido_Convertido[Ponteiro-2];
//Seqüência que calcula a distância do obstáculo detectado pelo robô.
Form1.Edit19.Text := InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2);
Form1.Edit20.Text := InttoStr(HextoInt(InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2)));
Timer := HextoInt((InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2)));
Tvoo := Timer*Pre_scaler/Relogio; //Tempo de vôo em segundos.
Form1.Edit12.Text := FloattoStr(Tvoo*1000);
Distancia_Obstaculo := Vel_som*Tvoo*100/2; //Distância em centímetros.
Form1.Edit18.Text := FloattoStr(Distancia_Obstaculo);
//Cálculo da posição do obstáculo no espaço X e Y.
if Form1.SpeedButton29.Enabled = False then
begin](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-196-320.jpg)
![179
X_Obstaculo := Round(Sqrt(Sqr(Distancia_Obstaculo)/(1+Sqr(Tan(Teta_Real)))));
Y_Obstaculo := Round(X_Obstaculo*Tan(Teta_Real));
while Teta_Acumulado 360 do
Teta_Acumulado := Teta_Acumulado - 360;
if (Teta_Acumulado 180) and (Teta_Acumulado 270) then
begin
X_Obstaculo := -X_Obstaculo;
Y_Obstaculo := -Y_Obstaculo;
end;
if (Teta_Acumulado 90) and (Teta_Acumulado 180) then
begin
X_Obstaculo := -X_Obstaculo;
Y_Obstaculo := -Y_Obstaculo;
end;
if (Teta_Acumulado 0) and (Teta_Acumulado 90) then
begin
X_Obstaculo := X_Obstaculo;
Y_Obstaculo := Y_Obstaculo;
end;
if (Teta_Acumulado 270) and (Teta_Acumulado 360) then
begin
X_Obstaculo := X_Obstaculo;
Y_Obstaculo := Y_Obstaculo;
end;
Form1.Image1.Canvas.MoveTo(Round(X_Real)+250+X_Obstaculo,-Round(Y_Real)+500-250-Y_Obstaculo);
Form1.Image1.Canvas.Ellipse(Round(X_Real)+250+X_Obstaculo-2,-Round(Y_Real)+500-250-Y_Obstaculo-
2,Round(X_Real)+250+X_Obstaculo+2,-Round(Y_Real)+500-250-Y_Obstaculo+2);
end;
end;
end;
end;
end;
//Trata a porta serial.
procedure TMultlinha.Execute;
var
cont:DWORD;
StrMens:AnsiString;
i, tama:integer;
begin
while not terminated do //loop infinito.
begin
if GLB_Conectado = true then //Se a porta serial foi aberta corretamente.
begin
BytesLidos := 0;
cont := 0;
if Readfile(hCom, BufferRecebe[cont], LEN_BUFFER, BytesLidos, nil) then //Lê a porta Serial.
VRecebido:=IntToStr(BufferRecebe[Cont]);
if BytesLidos 0 then //Se algum caracter foi lido.
begin
while cont BytesLidos do //Enquanto há caracteres a serem lidos.
begin
Synchronize(MostraString); //Mostra dados na tela.
contador := contador + 1;
cont := cont + 1;
end; //Fim do while 2
end;
end
else Sleep(1); //Para não travar o processo.
end;
end;
//Procedimento para fechar a comunicação com a porta serial.
procedure TForm1.FormCloseQuery(Sender: TObject; var CanClose: Boolean);
begin
if(GLB_Conectado = true) then CloseHandle(hCom);
end;
//Procedimento para ajuste da velocidade no campo texto.
procedure TForm1.ScrollBar1Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);
begin
Form1.Edit2.Text:=IntToStr(Form1.ScrollBar1.Position);
end;
//Procedimento para ajuste da velocidade no campo texto.
procedure TForm1.ScrollBar2Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-197-320.jpg)
![180
begin
Form1.Edit4.Text:=IntToStr(Form1.ScrollBar2.Position);
end;
//Procedimento que faz a correção dos dados recebidos, caso apresentem algum erro.
procedure TForm1.Button2Click(Sender: TObject);
var
i: Integer;
begin
Form1.Memo1.Clear;
Ponteiro := Ponteiro - 9;
Condicao := '';
if (VRecebido_Convertido[Ponteiro] = '0') or (VRecebido_Convertido[Ponteiro] = '204') then
begin
Condicao := 'CORRETO';
Form1.Label6.Font.Color := clLime;
end;
if (VRecebido_Convertido[Ponteiro] '0') and (InttoStr(StrtoInt(VRecebido_Convertido[Ponteiro + 2]) -
StrtoInt(VRecebido_Convertido[Ponteiro])) = '1') then
begin
Condicao := 'ERRO LEITURA';
Form1.Label6.Font.Color := clRed;
end;
if InttoStr(StrtoInt(VRecebido_Convertido[Ponteiro + 2]) - StrtoInt(VRecebido_Convertido[Ponteiro])) = '0' then
begin
Condicao := 'ERRO ZERO';
Form1.Label6.Font.Color := clRed;
end;
if InttoStr(StrtoInt(VRecebido_Convertido[Ponteiro + 2]) - StrtoInt(VRecebido_Convertido[Ponteiro])) = '-254' then
begin
Condicao := 'ERRO -254';
Form1.Label6.Font.Color := clRed;
end;
if InttoStr(StrtoInt(VRecebido_Convertido[Ponteiro + 2]) - StrtoInt(VRecebido_Convertido[Ponteiro])) = '-203' then
begin
Condicao := 'ERRO -203';
Form1.Label6.Font.Color := clRed;
end;
Form1.Label6.Caption := Condicao;
VRecebido := VRecebido_Convertido[Ponteiro];
for i:=1 to 10 do
begin
if Condicao = 'CORRETO' then
Form1.Memo1.Text := Form1.Memo1.Text + ' ' + VRecebido_Convertido[Ponteiro];
if Condicao = 'ERRO LEITURA' then
begin
Form1.Memo1.Text := Form1.Memo1.Text + ' ' + InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido));
VRecebido_Convertido[Ponteiro] := InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido));
end;
if Condicao = 'ERRO ZERO' then
begin
Form1.Memo1.Text := Form1.Memo1.Text + ' ' + InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 1);
VRecebido_Convertido[Ponteiro] := InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 1);
end;
if Condicao = 'ERRO -254' then
begin
Form1.Memo1.Text := Form1.Memo1.Text + ' ' + InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 255);
VRecebido_Convertido[Ponteiro] := InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 255);
end;
if Condicao = 'ERRO -203' then
begin
Form1.Memo1.Text := Form1.Memo1.Text + ' ' + InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 204);
VRecebido_Convertido[Ponteiro] := InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 204);
end;
Ponteiro := Ponteiro + 1;
end;
Ponteiro:= Ponteiro - 1;
end;
//Procedimento para desenhar o caminho na tela.
procedure TForm1.Image1MouseMove(Sender: TObject; Shift: TShiftState; X,Y: Integer);
begin
if (FlagLinhaLivre = 'True') and (SpeedLivre.Enabled = False) then
begin
Canvas.MoveTo(Mouse.CursorPos.X, Mouse.CursorPos.Y-25);
Canvas.LineTo(MovePt.X, MovePt.Y-25); //desenha a nova linha](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-198-320.jpg)


![183
begin
Alfa := 90;
Teta := Alfa - Alfa_anterior;
end;
if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then
begin
Alfa := 90;
Teta := Alfa - Alfa_anterior;
end;
end;
if (X_Anterior - X_Anterior2 = 0) and (X - X_Anterior 0) then
Begin
if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then
begin
Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior)));
Teta := Alfa + Alfa_anterior;
end;
if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then
begin
Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior)));
Teta := Alfa + Alfa_anterior;
end;
if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then
begin
Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior)));
Teta := 180 + Alfa - Alfa_anterior;
end;
if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then
begin
Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior)));
Teta := -180 + Alfa - Alfa_anterior;
end;
if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior = 0) then
begin
Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior)));
Teta := 90;
end;
end;
end;
//Seqüência lógica para determinar o teta possível mais próximo com base no teta calculado.
Temp := 1000;
for i := 1 to 56 do
begin
Menor_Diferenca := Teta - Teta_Possivel[i];
if Abs(Menor_Diferenca) Temp then
begin
Temp := Menor_Diferenca;
Teta_Final := Teta_Possivel[i];
Nd := Round(Nd_Possivel[i]);
Ne := Round(Ne_Possivel[i]);
end;
end;
c := 1;
with StringGrid1 Do
begin
Cells[c,l] := InttoStr(Round(X-X_Anterior));
c := c + 1;
Cells[c,l] := InttoStr(Round(Y-Y_Anterior));
c := c + 1;
Cells[c,l] := InttoStr(Round(Teta));
c := c + 1;
Cells[c,l] := FloattoStr(Teta_Final);
c := c + 1;
Cells[c,l] := FloattoStr(Nd);
c := c + 1;
Cells[c,l] := FloattoStr(Ne);
end;
//Seqüência lógica para determinar o distância possível mais próxima com base no valor calculado.
Hipotenusa := Sqrt(Sqr(X-X_Anterior)+Sqr(Y-Y_Anterior));
Temp := 1000;
for i := 0 to 200 do
begin
Menor_Diferenca := Hipotenusa - (i/Nres)*2*Pi*rd*Ajuste_Linha_Reta;
if Abs(Menor_Diferenca) Temp then
begin
Temp := Menor_Diferenca;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-201-320.jpg)
![184
Distancia := (i/Nres)*2*Pi*rd*Ajuste_Linha_Reta;
if i 20 then
begin
Nd := Round(i*0.5);
Ne := Round(i);
end
else
begin
Nd := Round(i-10);
Ne := Round(i);
end;
end;
end;
c := 1;
with StringGrid2 Do
begin
Cells[c,l] := InttoStr(0);
c := c + 1;
Cells[c,l] := InttoStr(Round(Hipotenusa));
c := c + 1;
Cells[c,l] := InttoStr(Round(Distancia));
c := c + 1;
Cells[c,l] := FloattoStr(Nd);
c := c + 1;
Cells[c,l] := FloattoStr(Ne);
end;
l := l + 1;
Alfa_Anterior := Alfa;
Teta_Anterior := Teta;
X_Anterior2 := X_Anterior;
Y_Anterior2 := Y_Anterior;
X_Anterior := X;
Y_Anterior := Y;
end
else FlagLinhaElastica := 'False';
//Seqüência lógica para habilitar o botão de envio dos dados.
if l = 2 then
begin
Form1.SpeedButton10.Enabled := True;
end;
end;
//Procedimento para habilitar o desenho do caminho a ser percorrido pelo robô.
procedure TForm1.SpeedElasticaClick(Sender: TObject);
begin
SpeedLivre.Enabled := True;
SpeedElastica.Enabled := False;
Form1.SpeedButton30.Enabled := True;
Form1.SpeedButton31.Enabled := True;
Form1.SpeedButton33.Enabled := True;
Form1.SpeedButton34.Enabled := True;
Form1.SpeedButton35.Enabled := True;
Form1.SpeedButton36.Enabled := True;
Form1.SpeedButton37.Enabled := True;
Form1.SpeedButton38.Enabled := True;
Form1.SpeedButton39.Enabled := True;
Form1.SpeedButton40.Enabled := True;
c := 1;
l := 0;
Image1.Canvas.Pen.Width := 1;
Image1.Canvas.Pen.Color := clGray;
Image1.Canvas.Pen.Style := psDash;
Image1.Canvas.MoveTo(250, 250);
Image1.Canvas.LineTo(250,0);
Image1.Canvas.MoveTo(250, 250);
Image1.Canvas.LineTo(500,250);
Image1.Canvas.MoveTo(0, 0);
end;
//Procedimento que habilita o botão para desenhar um caminho livre (apenas como teste).
procedure TForm1.SpeedLivreClick(Sender: TObject);
begin
SpeedElastica.Enabled := True;
SpeedLivre.Enabled := False;
FlagLinhaElastica := 'False';
end;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-202-320.jpg)
![185
//Procedimento para limpar as variáveis utilizadas para o desenho gráfico.
procedure TForm1.SpeedButton2Click(Sender: TObject);
var
i,j: Integer;
begin
FlagLinhaElastica := 'False';
SpeedLivre.Enabled := True;
SpeedElastica.Enabled := True;
c := 1;
l := 0;
Canvas.MoveTo(0, 0);
Alfa_Anterior := 0;
Teta_Anterior := 0;
X_Anterior2 := 0;
Y_Anterior2 := 0;
X_Anterior := 0;
Y_Anterior := 0;
X_Real := 0;
X_Anterior_Real := 0;
X_Aproximado := 0;
X_Anterior_Aproximado := 0;
Y_Real := 0;
Y_Anterior_Real := 0;
Y_Aproximado := 0;
Y_Anterior_Aproximado := 0;
Acumulador := 0;
Teta_Real := 0;
Teta_Anterior_Real := 0;
Teta_Aproximado := 0;
Teta_Anterior_Aproximado := 0;
Teta_Anterior_Real := 0;
Teta_Anterior_Real2 := 0;
Teta_Acumulado := 0;
Teta_Acumulado2 := 0;
Nd_Real := 0;
Ne_Real := 0;
Nd_Aproximado := 0;
Ne_Aproximado := 0;
Desenho := 0;
Form1.Memo10.Text := '';
Form1.Memo11.Text := '';
Form1.SpeedButton10.Enabled := False;
Form1.SpeedButton11.Enabled := False;
Form1.SpeedButton12.Enabled := False;
Form1.SpeedButton13.Enabled := False;
Form1.SpeedButton14.Enabled := False;
Form1.SpeedButton15.Enabled := False;
Form1.SpeedButton16.Enabled := False;
Form1.SpeedButton17.Enabled := False;
Form1.SpeedButton18.Enabled := False;
Form1.SpeedButton19.Enabled := False;
//Seqüência lógica para limpar os dados que plotam o caminho aproximado.
for i:= 1 to 10 do
begin
Enviado_Robo[Desenho,0] := 0;
Enviado_Robo[Desenho,0] := 1;
end;
//Seqüência lógica para limpar a tela de desenho.
Image1.Canvas.Brush.Color := clWhite;
Image1.Canvas.Pen.Color := clWhite;
Image1.Canvas.Pen.Width := 1;
Image1.Canvas.Rectangle(0,0,Image1.Width,Image1.Height);
//Seqüência lógica para limpar as planilhas onde se mostram os dados calculados.
for i := 1 to 100 do
begin
for j := 1 to 8 do
begin
Form1.StringGrid1.Cells[j,i] := '';
Form1.StringGrid2.Cells[j,i] := '';
Form1.StringGrid3.Cells[j,i] := '';
Form1.StringGrid4.Cells[j,i] := '';
end;
end;
end;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-203-320.jpg)
![186
//Procedimento utilizado para preencher o cabeçalho das planilhas apresentadas.
procedure TForm1.FormActivate(Sender: TObject);
var
i: Integer;
begin
with StringGrid1 do
begin
for i := 1 to 100 do Cells[0,i] := InttoStr(i);
Cells[1,0] := 'Delta X';
Cells[2,0] := 'Delta. Y';
Cells[3,0] := 'Ângulo C.';
Cells[4,0] := 'Ângulo E.';
Cells[5,0] := 'Volt. M1';
Cells[6,0] := 'Volt. M2';
Cells[7,0] := '';
Cells[8,0] := 'STATUS';
end;
with StringGrid2 do
begin
for i := 1 to 100 do Cells[0,i] := InttoStr(i);
Cells[1,0] := 'Ângulo';
Cells[2,0] := 'Dist. C.';
Cells[3,0] := 'Dist. E.';
Cells[4,0] := 'Volt. M1';
Cells[5,0] := 'Volt. M2';
Cells[6,0] := '';
Cells[7,0] := '';
Cells[8,0] := 'STATUS';
end;
with StringGrid4 do
begin
for i := 1 to 100 do Cells[0,i] := InttoStr(i);
Cells[1,0] := 'Volt. M1';
Cells[2,0] := 'Volt. M2';
Cells[3,0] := 'Ângulo C.';
Cells[4,0] := 'Dist. C.';
Cells[5,0] := 'Dist. Ob.';
Cells[6,0] := 'Delta X';
Cells[7,0] := 'Delta Y';
Cells[8,0] := 'STATUS';
end;
with StringGrid3 do
begin
for i := 1 to 100 do Cells[0,i] := InttoStr(i);
Cells[1,0] := 'Volt. M1';
Cells[2,0] := 'Volt. M2';
Cells[3,0] := 'Ângulo C.';
Cells[4,0] := 'Dist. C.';
Cells[5,0] := 'Dist. Ob.';
Cells[6,0] := 'Delta X';
Cells[7,0] := 'Delta Y';
Cells[8,0] := 'STATUS';
end;
end;
//Procedimento para incrementar o valor de Nd.
procedure TForm1.SpeedButton1Click(Sender: TObject);
begin
Nd := StrtoInt(Form1.Edit1.Text);
Nd := Nd + 1;
Form1.Edit1.Text:=IntToStr(Nd);
end;
//Procedimento para reduzir o valor de Nd.
procedure TForm1.SpeedButton3Click(Sender: TObject);
begin
Nd := StrtoInt(Form1.Edit1.Text);
Nd := Nd - 1;
Form1.Edit1.Text:=IntToStr(Nd);
end;
//Procedimento para incrementar o valor de Ne.
procedure TForm1.SpeedButton4Click(Sender: TObject);
begin
Ne := StrtoInt(Form1.Edit3.Text);
Ne := Ne + 1;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-204-320.jpg)
![187
Form1.Edit3.Text:=IntToStr(Ne);
end;
//Procedimento para reduzir o valor de Ne.
procedure TForm1.SpeedButton5Click(Sender: TObject);
begin
Ne := StrtoInt(Form1.Edit3.Text);
Ne := Ne - 1;
Form1.Edit3.Text:=IntToStr(Ne);
end;
//Procedimento utilizado para enviar comandos independentes para cada motor.
procedure TForm1.SpeedButton9Click(Sender: TObject);
var
temp1,temp2: integer;
begin
Origem_dado := 'Controle dos Motores';
temp1 := StrtoInt(Form1.Edit1.Text);
temp2 := StrtoInt(Form1.Edit3.Text);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (temp1 0) and (temp2 0) then D_Sent[3] := 198;
if (temp1 0) and (temp2 0) then D_Sent[3] := 202;
if (temp1 0) and (temp2 0) then D_Sent[3] := 197;
if (temp1 0) and (temp2 0) then D_Sent[3] := 201;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[4] := Form1.ScrollBar1.Position;
D_Sent[5] := Form1.ScrollBar2.Position;
D_Sent[6] := Abs(temp1);
D_Sent[7] := Abs(temp2);
Nd := temp1;
Ne := temp2;
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
//Mostra na planilha os dados enviados e calculados.
Teta := ((2*PI)/(Lr*Nres))*(Nd*rd-Ne*re)+Teta_Anterior;
X := (Nd*rd+Ne*re)*PI*Cos(Teta)/Nres+X_Anterior;
Y := (Nd*rd+Ne*re)*PI*Sin(Teta)/Nres+Y_Anterior;
l := l + 1;
with StringGrid3 do
begin
Cells[1,l] := Inttostr(Nd);
Cells[2,l] := Inttostr(Ne);
Cells[3,l] := Inttostr(Round(RadtoDeg(Teta-Teta_Anterior)));
Cells[4,l] := Inttostr(Round(Sqrt(Sqr(X-X_Anterior)+Sqr(Y-Y_Anterior)))); //Distância percorrida em cm.
Cells[5,l] := 'NA';
Cells[6,l] := InttoStr(Round(X-X_Anterior));
Cells[7,l] := InttoStr(Round(Y-Y_Anterior));
l := l + 1;
end;
X_Anterior := X;
Y_Anterior := Y;
Teta_Anterior := Teta;
end;
//Procedimento para sair do programa caso a tecla esc seja pressionada.
procedure TForm1.FormKeyDown(Sender: TObject; var Key: Word; Shift: TShiftState);
begin
if key = VK_Escape then Close();
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton10Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 1;
Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,1]);
Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,1]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-205-320.jpg)
![188
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton11Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 3;
Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,2]);
Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,2]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-206-320.jpg)
![189
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton12Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 5;
Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,3]);
Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,3]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton13Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 7;
Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,4]);
Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,4]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-207-320.jpg)
![190
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton14Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 9;
Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,5]);
Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,5]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton15Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 10;
Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,5]);
Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,5]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-208-320.jpg)
![191
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
//Habilita o botão para plotar o caminho aproximado.
Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp');
Form1.SpeedButton8.Flat := False;
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton16Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 2;
Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,1]);
Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,1]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-209-320.jpg)
![192
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
if l 2 then Habilita := 'True'
else
begin
//Habilita o botão para plotar o caminho aproximado.
Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp');
Form1.SpeedButton8.Flat := False;
end;
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton17Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 4;
Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,2]);
Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,2]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
if l 3 then Habilita := 'True'
else
begin
//Habilita o botão para plotar o caminho aproximado.
Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp');
Form1.SpeedButton8.Flat := False;
end;
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton18Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 6;
Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,3]);
Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,3]);](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-210-320.jpg)
![193
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
if l 4 then Habilita := 'True'
else
begin
//Habilita o botão para plotar o caminho aproximado.
Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp');
Form1.SpeedButton8.Flat := False;
end;
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento de envio de dados para o Robô (caminho desenhado aproximado).
procedure TForm1.SpeedButton19Click(Sender: TObject);
var
Temp1,Temp2: Integer;
begin
Desenho := 8;
Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,4]);
Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,4]);
//Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário).
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 198;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 202;
D_Sent[4] := StrtoInt(Form1.Edit22.Text);
D_Sent[5] := StrtoInt(Form1.Edit21.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 197;
D_Sent[4] := StrtoInt(Form1.Edit24.Text);
D_Sent[5] := StrtoInt(Form1.Edit23.Text);
end;
if (Temp1 0) and (Temp2 0) then
begin
D_Sent[3] := 201;
D_Sent[4] := StrtoInt(Form1.Edit26.Text);](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-211-320.jpg)
![194
D_Sent[5] := StrtoInt(Form1.Edit25.Text);
end;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[6] := Abs(Temp1);
D_Sent[7] := Abs(Temp2);
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
if l 5 then Habilita := 'True'
else
begin
//Habilita o botão para plotar o caminho aproximado.
Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp');
Form1.SpeedButton8.Flat := False;
end;
//Armazena os valores de Nd e Ne, para plotar o caminho aproximado.
Enviado_Robo[Desenho,0] := Temp1;
Enviado_Robo[Desenho,1] := Temp2;
end;
//Procedimento para atualizar a imagem do botão de sincronização dos dados.
procedure TForm1.Edit6Change(Sender: TObject);
begin
Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp');
Form1.SpeedButton41.Flat := False;
Form1.SpeedElastica.Enabled := False;
end;
//Procedimento utilizado para plotar o caminho aproximado realizado pelo Robô.
procedure TForm1.SpeedButton8Click(Sender: TObject);
var
i: integer;
begin
Acumulador := 0;
for i := 1 to Desenho do
begin
if (Trunc(i/2) i/2) then
begin
Nd_Aproximado := Round((Enviado_Robo[i,0])*Ajuste_Nd_Teta);
Ne_Aproximado := Round((Enviado_Robo[i,1])*Ajuste_Ne_Teta);
end
else
begin
Nd_Aproximado := Round(Enviado_Robo[i,1]*Ajuste_Linha_Reta);
Ne_Aproximado := Round(Enviado_Robo[i,1]*Ajuste_Linha_Reta);
end;
with Form1.Image1 do
begin
Teta_Aproximado := ((2*PI/(Lr*Nres))*(Nd_Aproximado*rd-Ne_Aproximado*re))+Teta_Anterior_Aproximado;
X_Aproximado := (Nd_Aproximado*rd+Ne_Aproximado*re)*PI*Cos(Teta_Aproximado)/Nres+X_Anterior_Aproximado;
Y_Aproximado := (Nd_Aproximado*rd+Ne_Aproximado*re)*PI*Sin(Teta_Aproximado)/Nres+Y_Anterior_Aproximado;
Canvas.Pen.Width := 2;
Canvas.Pen.Color := clGreen;
Canvas.MoveTo(X_Anterior_Aproximado+250,-Y_Anterior_Aproximado+500-250);
Canvas.LineTo(Round(X_Aproximado+250), Round(-Y_Aproximado+500-250)); {desenha a nova linha}
X_Anterior_Aproximado := Round(X_Aproximado);
Y_Anterior_Aproximado := Round(Y_Aproximado);
Teta_Anterior_Aproximado := Teta_Aproximado;
end;
end;
Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 d t.bmp');
Form1.SpeedButton8.Flat := True;
//Zerando as variáveis acumulativas.
Teta_Anterior_Aproximado := 0;
X_Anterior_Aproximado := 0;
Y_Anterior_Aproximado := 0;
end;
//Procedimento para plotagem do caminho percorrido pelo Robô (entrada manual).
procedure TForm1.SpeedButton20Click(Sender: TObject);
begin
try //Exceção criada para evitar erro de conversão de caracteres.
begin
Desenho := Desenho + 1;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-212-320.jpg)
![195
with Form1.Image1 do
begin
Nd_Real := StrtoInt(Form1.Edit5.Text);
Ne_Real := StrtoInt(Form1.Edit13.Text);
Form1.StringGrid3.Cells[3,Desenho] := InttoStr(Nd_Real);
Form1.StringGrid3.Cells[4,Desenho] := InttoStr(Ne_Real);
Teta_Real := (2*PI/(Lr*Nres)*(Nd_Real*rd-Ne_Real*re))+Teta_Anterior_Real;
Form1.StringGrid3.Cells[5,Desenho] := FloattoStr(Round(RadtoDeg(Teta_Real)));
X_Real := (Nd_Real*rd+Ne_Real*re)*PI*Cos(Teta_Real)/Nres+X_Anterior_Real;
Form1.StringGrid3.Cells[6,Desenho] := FloattoStr(Round(X_Real));
Y_Real := (Nd_Real*rd+Ne_Real*re)*PI*Sin(Teta_Real)/Nres+Y_Anterior_Real;
Form1.StringGrid3.Cells[7,Desenho] := FloattoStr(Round(Y_Real));
Canvas.Pen.Width := 1;
Canvas.Pen.Color := clGray;
Canvas.Pen.Style := psDash;
Canvas.MoveTo(250, 250);
Canvas.LineTo(250,0);
Canvas.MoveTo(250, 250);
Canvas.LineTo(500,250);
Canvas.MoveTo(0, 0);
Canvas.Pen.Width := 2;
Canvas.Pen.Color := clBlack;
Canvas.MoveTo(X_Anterior_Real+250,-Y_Anterior_Real+500-250);
Canvas.LineTo(Round(X_Real+250),Round(-Y_Real+500-250));
X_Anterior_Real := Round(X_Real);
Y_Anterior_Real := Round(Y_Real);
Teta_Anterior_Real := Teta_Real;
end;
end;
except
on EConvertError do
begin
MessageDlg('Não é um caractere válido, favor digitar apenas números inteiros positivos ou negativos.', mtError, [mbOK], 0);
end;
end;
end;
//Procedimento utilizado para transferir dados para o Microsoft Excel.
procedure TForm1.SpeedButton21Click(Sender: TObject);
var
Excel :variant;
i: integer;
begin
try
Excel := CreateOleObject('excel.application');
if not Excel.Application.Visible then
begin
Excel.Application.Visible := true;
Excel.WorkBooks.Add;
Excel.Cells[1,1] := 'Teta';
Excel.Cells[1,2] := 'Nd';
Excel.Cells[1,3] := 'Ne';
for i := 1 to 74 do
begin
Excel.Cells[i+1,1] := Teta_Possivel[i];
Excel.Cells[i+1,2] := Nd_Possivel[i];
Excel.Cells[i+1,3] := Ne_Possivel[i];
end;
end;
except
Showmessage('Ocorreu erro ao executar a transferência.');
end;
end;
//Procedimento utilizado para transferir dados para o Microsoft Excel.
procedure TForm1.SpeedButton22Click(Sender: TObject);
var
Excel :variant;
i,j: integer;
begin
try
Excel := CreateOleObject('excel.application');
if not Excel.Application.Visible then
begin
Excel.Application.Visible := true;
Excel.WorkBooks.Add;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-213-320.jpg)
![196
for i := 0 to 5 do
begin
for j := 0 to 8 do
Excel.Cells[i+1,j+1] := Form1.StringGrid1.Cells[j,i];
end;
end;
except
Showmessage('Ocorreu erro ao executar a transferência.');
end;
end;
//Procedimento utilizado para transferir dados para o Microsoft Excel.
procedure TForm1.SpeedButton23Click(Sender: TObject);
var
Excel :variant;
i,j: integer;
begin
try
Excel := CreateOleObject('excel.application');
if not Excel.Application.Visible then
begin
Excel.Application.Visible := true;
Excel.WorkBooks.Add;
for i := 0 to 5 do
begin
for j := 0 to 8 do
Excel.Cells[i+1,j+1] := Form1.StringGrid2.Cells[j,i];
end;
end;
except
Showmessage('Ocorreu erro ao executar a transferência.');
end;
end;
//Procedimento utilizado para transferir dados para o Microsoft Excel.
procedure TForm1.SpeedButton24Click(Sender: TObject);
var
Excel :variant;
i,j: integer;
begin
try
Excel := CreateOleObject('excel.application');
if not Excel.Application.Visible then
begin
Excel.Application.Visible := true;
Excel.WorkBooks.Add;
for i := 0 to 10 do
begin
for j := 0 to 8 do
Excel.Cells[i+1,j+1] := Form1.StringGrid4.Cells[j,i];
end;
end;
except
Showmessage('Ocorreu erro ao executar a transferência.');
end;
end;
//Procedimento utilizado para transferir dados para o Microsoft Excel.
procedure TForm1.SpeedButton25Click(Sender: TObject);
var
Excel :variant;
i,j: integer;
begin
try
Excel := CreateOleObject('excel.application');
if not Excel.Application.Visible then
begin
Excel.Application.Visible := true;
Excel.WorkBooks.Add;
for i := 0 to 99 do
begin
for j := 0 to 8 do
Excel.Cells[i+1,j+1] := Form1.StringGrid3.Cells[j,i];
end;
end;
except](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-214-320.jpg)
![197
Showmessage('Ocorreu erro ao executar a transferência.');
end;
end;
//Procedimento de solicitação de leitura do sonar novamente.
procedure TForm1.SpeedButton26Click(Sender: TObject);
begin
Sonar := 1;
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[3] := 255;
D_Sent[4] := 255;
D_Sent[5] := 255;
D_Sent[6] := 255;
D_Sent[7] := 255;
WriteFile(hCom,D_Sent,8,BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
end;
//Procedimento utilizado para re-enviar o último pacote de dados enviado ao robô.
procedure TForm1.SpeedButton27Click(Sender: TObject);
begin
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
Confirmar_Dados_Novamente := 'True';
end;
//Procedimento utilizado para solicitar ao robô o re-envio do último pacote de dados já enviado.
procedure TForm1.SpeedButton28Click(Sender: TObject);
begin
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[3] := 0;
D_Sent[4] := 0;
D_Sent[5] := 0;
D_Sent[6] := 0;
D_Sent[7] := 0;
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
Confirmar_Dados_Novamente := 'True';
end;
//Procedimento para mostrar o tempo de execução do programa.
procedure TForm1.Timer1Timer(Sender: TObject);
begin
StatusBar1.Panels[0].Text:= ' Tempo de Execução do Programa: ' + fExecutando(Tempo);
end;
//Procedimento para não plotar a leitura do sonar.
procedure TForm1.SpeedButton6Click(Sender: TObject);
begin
Form1.SpeedButton29.Enabled := True;
Form1.SpeedButton6.Enabled := False;
end;
//Procedimento para plotar a leitura do sonar.
procedure TForm1.SpeedButton29Click(Sender: TObject);
begin
Form1.SpeedButton6.Enabled := True;
Form1.SpeedButton29.Enabled := False;
end;
//Procedimento para desenhar um caminho já conhecido.
procedure TForm1.SpeedButton30Click(Sender: TObject);
var
j: integer;
begin
Form1.SpeedButton30.Enabled := False;
Form1.SpeedButton31.Enabled := False;
Form1.SpeedButton33.Enabled := False;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-215-320.jpg)

![199
5: begin
X := 0;
Y := 0;
end;
end;
Form1.Image1Click(Sender);
Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2));
Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y));
end;
Form1.SpeedElastica.Enabled := True;
end;
//Procedimento para solicitar os dados novamente ao robô.
procedure TForm1.SpeedButton32Click(Sender: TObject);
begin
D_Sent[1] := 204;
D_Sent[2] := 204;
D_Sent[3] := 0;
D_Sent[4] := 0;
D_Sent[5] := 0;
D_Sent[6] := 0;
D_Sent[7] := 0;
WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
//Inicia a contagem do tempo de envio / recebimento dos dados do robô.
Tempo_Inicio := Time;
Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO';
Solicitar_Dados_Novamente := 'True';
end;
//Procedimento para desenhar um caminho já conhecido.
procedure TForm1.SpeedButton33Click(Sender: TObject);
var
j: integer;
begin
Form1.SpeedButton30.Enabled := False;
Form1.SpeedButton31.Enabled := False;
Form1.SpeedButton33.Enabled := False;
Form1.SpeedButton34.Enabled := False;
Form1.SpeedButton35.Enabled := False;
Form1.SpeedButton36.Enabled := False;
Form1.SpeedButton37.Enabled := False;
Form1.SpeedButton38.Enabled := False;
Form1.SpeedButton39.Enabled := False;
Form1.SpeedButton40.Enabled := False;
Image1.Canvas.Pen.Width := 2;
Image1.Canvas.Pen.Color := clGray;
for j := 1 to 3 do
begin
case j of
1: begin
X := 28;
Y := 30;
end;
2: begin
X := 50;
Y := 15;
end;
3: begin
X := 83;
Y := 41;
end;
end;
Form1.Image1Click(Sender);
Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2));
Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y));
end;
Form1.SpeedElastica.Enabled := True;
end;
//Procedimento para desenhar um caminho já conhecido.
procedure TForm1.SpeedButton34Click(Sender: TObject);
var
j: integer;
begin
Form1.SpeedButton30.Enabled := False;
Form1.SpeedButton31.Enabled := False;](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-217-320.jpg)




![204
end;
end;
Form1.Image1Click(Sender);
Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2));
Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y));
end;
Form1.SpeedElastica.Enabled := True;
end;
//Procedimento de ajuste do valor de Nd.
procedure TForm1.TrackBar1Change(Sender: TObject);
begin
Form1.Edit27.Text := FloattoStr((Form1.TrackBar1.Position)/100);
Ajuste_Nd_Teta := StrtoFloat(Form1.Edit27.Text);
Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp');
Form1.SpeedButton41.Flat := False;
Form1.SpeedElastica.Enabled := False;
end;
//Procedimento de ajuste do valor de Ne.
procedure TForm1.TrackBar2Change(Sender: TObject);
begin
Form1.Edit28.Text := FloattoStr((Form1.TrackBar2.Position)/100);
Ajuste_Ne_Teta := StrtoFloat(Form1.Edit28.Text);
Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp');
Form1.SpeedButton41.Flat := False;
Form1.SpeedElastica.Enabled := False;
end;
//Procedimento utilizado para atualizar os valores com base nos parâmetros de ajuste do robô.
procedure TForm1.SpeedButton41Click(Sender: TObject);
var
i,j,k: integer;
temp1,temp2,temp3,temp4,temp5,temp6: real;
begin
try //Exceção criada para evitar erro de conversão de caracteres.
begin
Nres := StrtoInt(Form1.Edit6.Text); //Resolução dos sensores, que é o número de pulsos lidos em uma revolução das rodas.
rd := StrtoFloat(Form1.Edit7.Text); //Raio da roda direita.
re := StrtoFloat(Form1.Edit8.Text); //Raio da roda esquerda.
Lr := StrtoInt(Form1.Edit9.Text); //Comprimento do eixo do robô.
Temp_amb := (StrtoInt(Form1.Edit17.Text)) + 273.15; //Temperatura ambiente em graus Kelvin.
Vel_Som := 331.4*Sqrt(Temp_amb/273);
Form1.Edit16.Text := InttoStr(Round(Vel_Som));
Ajuste_Nd_Teta := StrtoFloat(Form1.Edit27.Text);
Ajuste_Ne_Teta := StrtoFloat(Form1.Edit28.Text);
Teta_Ajuste_Real := StrtoFloat(Form1.Edit29.Text);
Ajuste_Linha_Reta := StrtoFloat(Form1.Edit30.Text);
//Armazena os valores de ângulos possíveis com base no Nres.
for i := 1 to 28 do
begin
Nd := i;
Ne := -1;
Teta_Possivel[i] := Round((RadtoDeg((2*PI/(Lr*Nres))*(Nd*rd-Ne*re)))*Ajuste_Nd_Teta);
if Abs(Teta_Possivel[i]) = 180 then
begin
Nd_Possivel[i] := i;
Ne_Possivel[i] := -1;
end
else
begin
Nd_Possivel[i] := 0;
Ne_Possivel[i] := 0;
Teta_Possivel[i] := 0;
end;
//Seqüência lógica necessária, caso os ângulos calculados, sejam maiores do que 360 graus.
//while Teta_Possivel[i] 360 do Teta_Possivel[i] := Teta_Possivel[i] - 360;
end;
//Armazena os valores de ângulos possíveis com base no Nres.
for i := 29 to 56 do
begin
Nd := -1;
Ne := i-28;
Teta_Possivel[i] := Round((RadtoDeg((2*PI/(Lr*Nres))*(Nd*rd-Ne*re)))*Ajuste_Ne_Teta);
if Abs(Teta_Possivel[i]) = 180 then
begin](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-222-320.jpg)
![205
Nd_Possivel[i] := -1;
Ne_Possivel[i] := i-28;
end
else
begin
Nd_Possivel[i] := 0;
Ne_Possivel[i] := 0;
Teta_Possivel[i] := 0;
end;
//Seqüência lógica necessária, caso os ângulos calculados, sejam maiores do que 360 graus.
//while Teta_Possivel[i] 360 do Teta_Possivel[i] := Teta_Possivel[i] - 360;
end;
//Ordena os ângulos possíveis de forma ascendente.
for i := 1 to 56 do
begin
for j := i+1 to 56 do
begin
if (Teta_Possivel[i] Teta_Possivel[j]) and (Teta_Possivel[i] Temp2) then
begin
temp1 := Teta_Possivel[i];
temp3 := Nd_Possivel[i];
temp5 := Ne_Possivel[i];
Teta_Possivel[i] := Teta_Possivel[j];
Nd_Possivel[i] := Nd_Possivel[j];
Ne_Possivel[i] := Ne_Possivel[j];
Teta_Possivel[j] := temp1;
Nd_Possivel[j] := temp3;
Ne_Possivel[j] := temp5;
end;
end;
temp2 := Teta_Possivel[i];
temp4 := Nd_Possivel[i];
temp6 := Ne_Possivel[i];
end;
k := 0;
for i := 1 to 56 do
begin
if Teta_Possivel[i] 0 then
begin
k := k + 1;
Teta_Possivel[k] := Teta_Possivel[i];
Nd_Possivel[k] := Nd_Possivel[i];
Ne_Possivel[k] := Ne_Possivel[i];
end;
end;
//Zera a variável VRecebido_Convertido.
for i := 1 to 100000 do VRecebido_Convertido[i] := '0';
//Atualiza o padrão do botão de atualização dos parâmetros do Robô.
Form1.SpeedButton41.Glyph.LoadFromFile('connect16_d.bmp');
Form1.SpeedButton41.Flat := True;
Form1.SpeedElastica.Enabled := True;
end;
except
on EConvertError do
begin
MessageDlg('Não é um caractere válido, favor digitar apenas números positivos.', mtError, [mbOK], 0);
end;
end;
end;
//Seqüência lógica utilizada para listar os pulsos vs as distâncias equivalentes.
procedure TForm1.SpeedButton42Click(Sender: TObject);
var
i: integer;
begin
for i := 0 to 15 do
begin
Distancia := (i/Nres)*2*Pi*rd*Ajuste_Linha_Reta;
if i 20 then
begin
Nd := Round(i*0.5);
Ne := Round(i);
end
else
begin
Nd := Round(i-10);](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-223-320.jpg)
![206
Ne := Round(i);
end;
Form1.StringGrid3.Cells[1,i+1] := InttoStr(Round(Distancia));
Form1.StringGrid3.Cells[2,i+1] := InttoStr(Round(Nd));
Form1.StringGrid3.Cells[3,i+1] := InttoStr(Round(Ne));
end;
end;
//Procedimento para ajuste do valor de teta real.
procedure TForm1.TrackBar3Change(Sender: TObject);
begin
Form1.Edit29.Text := FloattoStr((Form1.TrackBar3.Position)/100);
Teta_Ajuste_Real := StrtoFloat(Form1.Edit29.Text);
Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp');
Form1.SpeedButton41.Flat := False;
Form1.SpeedElastica.Enabled := False;
end;
//Procedimento para ajuste do cálculo da linha reta.
procedure TForm1.TrackBar4Change(Sender: TObject);
begin
Form1.Edit30.Text := FloattoStr((Form1.TrackBar4.Position)/100);
Ajuste_Linha_Reta := StrtoFloat(Form1.Edit30.Text);
Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp');
Form1.SpeedButton41.Flat := False;
Form1.SpeedElastica.Enabled := False;
end;
end.
//FIM DO PROGRAMA](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-224-320.jpg)















![224
11 REFERÊNCIAS
[1] HAYES, A. T., MARTINOLI, A. e GOODMAN, R. M., “Distributed Odor Source
Localization”, IEEE Sensors Journal, Vol. 2, No. 3, Junho, 2002.
[2] KAWAGUCHI, Y., YOSHIDA, I., KURUMATANI, H., KIKUTA, T. e YAMADA,
Y., “Internal Pipe Inspection Robot”, Proceedings of IEEE International Conferences
on Robotics and Automation, Nagoya, Japan, Vol. 1, p. 857 – 862, 1995.
[3] DUCKETT, T., AXELSSON, M., SAFFIOTTI, A., “Learning to Locate an Odour
Source with a Mobile Robot”, Proceedings of International Conferences on Robotics
and Automation, Vol. 4, p. 4017 – 4022, 2001.
[4] LILIENTHAL, A., DUCKETT, T., “Gas Source Localisation by Constructing
Concentration Gridmaps with a Mobile Robot”, Proceedings of the European
Conference on Mobile Robots, 2003.
[5] MONKMAN, G. J. e TAYLOR, P. M., “Thermal Tactile Sensing”, IEEE
Transactions on Robotics and Automation, Vol. 9, No. 3, Junho, 1993.
[6] RUSSEL, R. A., “Heat Trails as Short-Lived Navigational Markers for Mobile
Robots”, Proceedings of the 1997 IEEE International Conference on Robotics and
Automation, Albuquerque, New Mexico, Abril, 1997.
[7] WAGNER, I. A., LINDENBAUM, M. e BRUCKSTEIN, A. M., “Distributed
Covering by Ant-Robots Using Evaporating Traces”, IEEE Transactions on Robotics
and Automation, Vol. 15, No. 5, Outubro, 1999.
[8] COSTA, A. H. R. e PEGORARO, R., “Construindo Robôs Autônomos para
Partidas de Futebol: O Time Guaraná”, SBA Controle Automação, Vol. 11, No.
03, Set., Out., Nov., Dezembro de 2000.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-242-320.jpg)
![225
[9] GOMES, M. M., KAWAMURA, J., LEONARDI, F., PARRO, V. C. e SEIFER, P. G.,
“Aplicação do Sistema de Futebol de Robôs como Ferramenta Didática”, XXIX
COBENGE – Congresso Brasileiro de Ensino de Engenharia, Porto Alegre, RS,
Setembro, 2001.
[10] KITANO, H., ASADA, M., NODA, I. e MATSUBARA, H., “RoboCup: Robot World
Cup”, IEEE Robotics Automation Magazine, Setembro, 1998.
[11] VIEIRA, F. C., ALSINA, P. J. e MEDEIROS, A. A. D., “Micro-Robot Soccer Team –
Mechanical and Hardware Implementation”, Proceedings of COBEM, Robotics and
Control – XVI Congresso Brasileiro de Engenharia Mecânica, Vol. 15, p. 534 – 540,
Novembro, 2001.
[12] HWANG, S. e KINTIGH, B. P., “Implementation of An Intelligent Roving Robot
Using Multiple Sensors”, Proceedings of the 1994 IEEE International Conference on
Multisensor Fusion and Integration for Intelligent Systems (MFI’ 94), Las Vegas, NV,
Outubro, 1994.
[13] DINNOUTI, L. S., VICTORINO, A. C. e SILVEIRA, G. F., “Simultaneous
Localization and Map Building by a Mobile Robot Using Sonar Sensors”
Proceedings of the 17th International Congress of Mechanical Engineering – COBEM
2003, São Paulo, Novembro, 2003.
[14] AIRES, K. R. T., ALSINA, P. J. e MEDEIROS, A. A. D., “A Global Vision System for
Mobile Mini-Robots” Proceedings of XVI COBEM – Congresso Brasileiro de
Engenharia Mecânica, Vol. 15, p. 240 – 247, Novembro, 2001.
[15] AMBROSE, R., ASKEW, R. S., “An Experimental Investigation of Actuators for
Space Robots” IEEE International Conference on Robotics and Automation, p. 2625 –
2630, 1995.
[16] ASSIS, W. O., COELHO, A. D., GOMES, M. M., LABATE, C. G., CALASSO, D. F.,
CONDE FILHO, J. C. G., GUIMARÃES, F. A. Construção de robôs jogadores de
futebol, Revista Mecatrônica Fácil, nº 26, São Paulo, Janeiro/ Fevereiro, 2006.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-243-320.jpg)
![226
[17] ADÔRNO, B. V. “Controles de velocidade e trajetória para o robô Sonic Shark e
sensoriamento por ultra-som”, Curso de Engenharia Mecatrônica, Faculdade de
Tecnologia, Brasília, Junho, 2004.
[18] OTTONI, G. L., LAGES, W. F. “Navegação de Robôs Móveis em Ambientes
Desconhecidos utilizando Sonares de Ultra-som”, Revista Controle Automação, Vol.
14, n. 4, Outubro/ Novembro/ Dezembro, 2003.
[19] BIANCHI, R. A. C., SIMÕES, A. S., COSTA, A. R. “Comportamentos reativos para
seguir pistas em um robô móvel guiado por visão”, Simpósio Brasileiro de Automação
Inteligente, 2001.
[20] SANDI, F. A., HEMERLY, E. M., LAGES, W. F. “Sistema para navegação e guiagem
de robôs móveis autônomos”, SBA Controle Automação, Vol. 9, nº 3, Setembro/
Outubro/ Novembro/ Dezembro, 1998.
[21] MAXIM, INTEGRATED PRODUCTS., “+/- 15kV ESD-Protected, +5V RS-232
Transceivers”, 1996. Disponível em: http://www.maxim-ic.com. Acesso em:
Jan/2004.
[22] HITACHI, Ltd., “HD74HC244 – Octal Buffers/ Line Drivers/ Line Receivers (with
noninverted 3-state outputs)”, 1999. Disponível em: http://www.has.hitachi.com.sg.
Acesso em: Jan/2004.
[23] BRAGA, N. C., “Controle Remoto de 4 Canais”, Revista Saber Eletrônica, Editora
Saber Ltda., São Paulo, Ano 34, No. 316, páginas 8 a 12, Maio, 1999.
[24] SOARES, M. J., “Robô RF”, Revista Mecatrônica Fácil, Editora Saber Ltda., São
Paulo, Ano 3, No. 15, páginas 38 a 45, Março, 2004.
[25] ATMEL, CORPORATION., “8 Bit AVR Microcontroller with 8K Bytes In-System
Programmable Flash AT90S8515”, 2001. Disponível em: http://www.atmel.com.
Acesso em: Jan/2004.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-244-320.jpg)
![227
[26] STMICROELECTRONICS., “L298 – Dual Full Bridge Driver”, 2000. Disponível em:
http://www.st.com. Acesso em: Jan/2004.
[27] PIERI, E. R., “Curso de Robótica Móvel”, Universidade Federal de Santa Catarina,
Programa de Pós-graduação em Engenharia Elétrica, Florianópolis, Março, 2002.
[28] FENG, L., BORENSTEIN, J. and EVERETT, H. R., “Where am I? - Sensors and
Methods for Autonomous Mobile Robot Positioning”, The University of Michigan,
Vol. 3, December, 1994.
[29] BORENSTEIN, J., EVERETT, H. R. e FENG, L., “Where am I? - Sensors and
Methods for Mobile Robot Positioning”, The University of Michigan, Abril, 1996.
[30] PHILIPS SEMICONDUCTORS., “KMI18/2 Integrated rotational speed sensor”,
Setembro, 2000. Disponível em: http://www.nxp.com. Acesso em: Abr/2007.
[31] BEZERRA, C. G., “Localização de um Robô Móvel usando Odometria e Marcos
Naturais”, Universidade Federal do Rio Grande do Norte, Centro de Tecnologia,
Programa de Pós-Graduação em Engenharia Elétrica, Março, 2004.
[32] RIBEIRO, M. I., “Localização em Robótica Móvel - Odometria”, Instituto Superior
Técnico, Instituto de Sistemas e Robótica, Portugal, Outubro, 1999.
[33] SOUZA, G. T., “Controle e Automação Industrial”, Escola Técnica Estadual Pedro
Ferreira Alves, Curso de Mecatrônica, Mogi Mirim, Julho, 2004. Disponível em:
http:// www.juliostampa.com.br/~junior/robotica/cai.pdf. Acesso em: Jul/2007.
[34] MARCO, CANTÙ., “Dominando o Delphi 7: a Bíblia”. 1. ed. São Paulo: Makron
Books, 2003. 896p.
[35] ASSIS, W. O., GENOVA, W. J., GOMES, M. M., COELHO, A. D. “Aplicação de
Tecnologias de Controle de Processos Contínuos e Processamento de Imagens no
Futebol de Robôs”. Anais da Competição Brasileira de Robótica, Florianópolis – SC,
2007.](https://image.slidesharecdn.com/desenvolvimento-de-robo-movel1-150402160155-conversion-gate01/85/Desenvolvimento-de-robo-movel-1-245-320.jpg)
Desenvolvimento de-robo-movel (1)
- 1. FÁBIO DE ALMEIDA GUIMARÃES DESENVOLVIMENTO DE ROBÔ MÓVEL UTILIZADO PARA A EXPLORAÇÃO DE AMBIENTES HOSTIS SÃO CAETANO DO SUL 2007
- 2. FÁBIO DE ALMEIDA GUIMARÃES DESENVOLVIMENTO DE ROBÔ MÓVEL UTILIZADO PARA A EXPLORAÇÃO DE AMBIENTES HOSTIS Dissertação apresentada à Escola de Engenharia Mauá do Centro Universitário do Instituto Mauá de Tecnologia para a obtenção do Título de Mestre em Engenharia de Processos Químicos e Bioquímicos. Linha de Pesquisa: Análise e Controle de Processos Químicos. Orientador: Prof. Dr. Wânderson de Oliveira Assis SÃO CAETANO DO SUL 2007
- 3. Guimarães, Fábio de Almeida Desenvolvimento de Robô Móvel Utilizado para a Exploração de Ambientes Hostis / Fábio de Almeida Guimarães – São Caetano do Sul, SP: CEUN-EEM, 2007. 227 p. Dissertação de Mestrado em Engenharia de Processos Químicos e Bioquímicos – Escola de Engenharia Mauá do Centro Universitário do Instituto Mauá de Tecnologia, São Caetano do Sul, SP, 2007. Palavras Chaves: Robôs Autônomos. Odometria. Comunicação por meio de Radiofreqüência.
- 5. i AGRADECIMENTOS Chego ao fim de mais uma etapa na minha vida, a conclusão do meu Mestrado, e aqui quero deixar registrado os meus agradecimentos a todos que de uma certa forma fizeram parte do desenvolvimento desse projeto. Aos meus pais Anamaria e Nivaldir, quero agradecer por toda a dedicação, por todo o carinho, por todos os ensinamentos e pelo empenho para que os estudos sempre fizessem parte da minha vida. Aos meus irmãos Alexandre e Marcelo que se tornaram uma grande fonte inspiradora, não só pela inteligência e sabedoria, mas principalmente pela força de vontade tanto nos estudos, quanto no trabalho. As minhas cunhadas, Ana Paula e Amanda, que mesmo de longe fizeram parte desse projeto. A minha amada esposa Daniela, pela paciência, compreensão, interesse e incentivo desde o início do desenvolvimento deste trabalho. Ao meu professor Wânderson, que sempre me ajudou, apoiou e esteve presente nos momentos de maior dificuldade, e que além de orientador, tornou-se um grande amigo. Aos meus grandes amigos Peterson e sua esposa Mari, que sempre estiveram ao meu lado, apoiando, incentivando e ajudando sempre que possível. Aos meus amigos da GM, Leonardo e Fernando, pela compreensão e apoio nos momentos mais difíceis. E por último, a alguém muito especial, minha filha Mariana, que se tornou a maior incentivadora para a conclusão deste trabalho. A todos vocês que são a minha grande família, Muito Obrigado.
- 6. ii RESUMO Este trabalho aborda diversos conceitos relacionados à robótica móvel, onde se procura apresentar as principais etapas envolvidas no projeto de um robô. A abordagem consiste no desenvolvimento de um robô móvel autônomo, capaz de explorar ambientes hostis e com a capacidade de detectar obstáculos, apresentando resultados confiáveis, com qualidade e baixo custo. A solução proposta é simples e flexível, possibilitando a adição de novos componentes ao sistema, apresenta o desenvolvimento de um algorítimo de cálculo para a aquisição da velocidade dos motores através do uso de sensores de velocidade, além de um protocolo simples e eficiente, incluindo sistema de codificação dos dados para minimização de erros na comunicação. Diversos testes foram executados ao longo do desenvolvimento do trabalho e a maioria deles são apresentados detalhadamente, possibilitando a sua inteira e precisa reprodução. Palavras-chave: Robótica, Mapeamento, Odometria, Detecção de Obstáculos, Sensores, Protocolos de Comunicação, Radiofreqüência e Motores de Corrente Contínua.
- 7. iii ABSTRACT This work approaches concepts related to mobile robotic, presenting the main involved stages in a robot project. The approaches consists in an autonomous mobile robotic development, capable to explore hostile enviroments and with the capability to detect obstacles, presenting reliable results, with quality and low cost. The proposal solution is simple and flexible, providing capability to add new components in the system, presenting an algorithm development to acquire the engines speed through speed sensors, as well as an simple and efficient protocol, including a data codification system to minimize the communication fails. Several tests had been executed in the development of this work and the majority of them, are presented in details, making possible its entire and accurate reproduction. Keywords: Robotic, Mapping, Odometry, Obstacles Detection, Sensors, Communication Protocols, Radio Frequency and DC Motors.
- 8. iv LISTA DE ILUSTRAÇÕES FIGURA 1.1 – Etapas Envolvidas na Construção de um Robô.................................................3 FIGURA 1.2 – Exemplos de Aplicações....................................................................................5 FIGURA 3.1 – Diagrama em Blocos do Sistema de Interface com o Usuário ........................10 FIGURA 3.2 – Diagrama Elétrico do Sistema de Interface com o Usuário.............................11 FIGURA 3.3 – Diagrama em Blocos do Robô.........................................................................12 FIGURA 3.4 – Diagrama Elétrico do Robô .............................................................................13 FIGURA 3.5 – Ciclo de Funcionamento..................................................................................14 FIGURA 4.1 – Módulo de Transmissão...................................................................................18 FIGURA 4.2 – Circuito Esquemático do Módulo de Transmissão..........................................19 FIGURA 4.3 – Módulo de Recepção .......................................................................................19 FIGURA 4.4 – Diagrama em Blocos do Módulo de Recepção ...............................................20 FIGURA 4.5 – Espectro Eletromagnético................................................................................20 FIGURA 4.6 – Esquema de Confecção da Antena ..................................................................21 FIGURA 4.7 – Diagrama em Blocos do CI L298N .................................................................26 FIGURA 4.8 – Força x Raio = Torque.....................................................................................29 FIGURA 4.9 – Curva de Torque e Potência vs. Velocidade Angular (Sem Redução)............31 FIGURA 4.10 – Curva de Torque e Potência vs. Velocidade Angular (Com Redução) .........32 FIGURA 4.11 – Módulo de Ultrasom Adotado (Sonar) ..........................................................35 FIGURA 4.12 – Sensor de Velocidade adotado.......................................................................37 FIGURA 4.13 – Princípio de funcionamento do Sensor de Velocidade adotado ....................37 FIGURA 4.14 – Curvas Medidas pelo Osciloscópio (Teste do Sonar) (Parte 1).....................39 FIGURA 4.15 – Diagrama Elétrico do Circuito de Teste do Sonar (Parte 1)..........................39 FIGURA 4.16 – Diagrama Elétrico do Teste do Sonar (Parte 2).............................................40 FIGURA 4.17 – Fluxograma da Lógica de Programação Utilizada.........................................40 FIGURA 4.18 – Tela do Programa em Execução (Teste do Sonar) (Parte 2)..........................43 FIGURA 4.19 – Distância Medida vs. Distância Calculada e Calibrada (Gráficos)................45 FIGURA 4.20 – Diagrama Elétrico do Circuito de Odometria................................................46 FIGURA 4.21 – Fluxograma da lógica de programação utilizada...........................................46 FIGURA 4.22 – Tela do Programa Desenvolvido em Execução.............................................47 FIGURA 5.1 – Ilustração da plataforma robótica utilizada......................................................48 FIGURA 5.2 – Ilustração do movimento infinitesimal do robô...............................................50
- 9. v FIGURA 5.3 – Ilustração do caminho teórico percorrido pelo robô........................................54 FIGURA 6.1 – Imagem do software de controle desenvolvido ...............................................56 FIGURA 6.2 – Seqüência de dados recebidos pelo PC............................................................58 FIGURA 6.3 – Fluxograma da leitura da porta serial e ajuste do erro.....................................59 FIGURA 6.4 – Parâmetros de ajuste do robô...........................................................................60 FIGURA 6.5 – Teste #1 relacionado aos dados da Tabela 6.7 (Escala 1:4,8) .........................68 FIGURA 6.6 – Teste #2 relacionado aos dados da Tabela 6.7 (Escala 1:6,6) .........................68 FIGURA 6.7 – Teste #3 relacionado aos dados da Tabela 6.7 (Escala 1:3,8) .........................69 FIGURA 6.8 – Teste #4 relacionado aos dados da Tabela 6.7 (Escala 1:5,7) .........................69 FIGURA 6.9 – Variação do sinal PWM...................................................................................71 FIGURA 6.10 – Exemplo de variação do sinal PWM (50% de ciclo de trabalho)..................71 FIGURA 6.11 – Diagrama de Estados (sinal dos sensores de velocidade)..............................72 FIGURA 6.12 – Fluxograma da lógica de compensação de velocidade..................................73 FIGURA 6.13 – Teste relacionado aos dados da Tabela 6.8 (Escala 1:7,6) ............................74 FIGURA 6.14 – Teste relacionado aos dados da Tabela 6.9 (Escala 1:7,7) ............................75 FIGURA 6.15 – Simulação de caminhos possíveis a serem percorridos pelo robô.................77 FIGURA 6.16 – Resultado dos cálculos baseados nos caminhos da figura 6.15.....................77 FIGURA 6.17 – Situações possíveis para o cálculo do ângulo de giro do robô ......................79 FIGURA 6.18 – Teste #01 utilizando-se a interface gráfica....................................................80 FIGURA 6.19 – Caminho real percorrido pelo robô (Teste #01) (Escala 1:7,8) .....................80 FIGURA 6.20 – Teste #02 utilizando-se a interface gráfica....................................................81 FIGURA 6.21 – Caminho real percorrido pelo robô (Teste #02) (Escala 1:10,4) ...................81 FIGURA 6.22 – Teste #03 utilizando-se a interface gráfica....................................................82 FIGURA 6.23 – Caminho real percorrido pelo robô (Teste #03) (Escala 1:8,15) ...................82 FIGURA 6.24 – Teste #04 utilizando-se a interface gráfica....................................................83 FIGURA 6.25 – Caminho real percorrido pelo robô (Teste #04) (Escala 1:6,54) ...................83 FIGURA 6.26 – Teste #05 utilizando-se a interface gráfica....................................................84 FIGURA 6.27 – Caminho real percorrido pelo robô (Teste #05) (Escala 1:6,82) ...................84 FIGURA 6.28 – Teste #06 utilizando-se a interface gráfica....................................................85 FIGURA 6.29 – Caminho real percorrido pelo robô (Teste #06) (Escala 1:8,37) ...................85 FIGURA 6.30 – Teste #07 utilizando-se a interface gráfica....................................................86 FIGURA 6.31 – Caminho real percorrido pelo robô (Teste #07) (Escala 1:13,33) .................86 FIGURA 6.32 – Teste #08 utilizando-se a interface gráfica....................................................87 FIGURA 6.33 – Caminho real percorrido pelo robô (Teste #08) (Escala 1:9,5) .....................87
- 10. vi FIGURA 6.34 – Teste #09 utilizando-se a interface gráfica....................................................88 FIGURA 6.35 – Caminho real percorrido pelo robô (Teste #09) (Escala 1:7,32) ...................88 FIGURA 6.36 – Teste #10 utilizando-se a interface gráfica....................................................89 FIGURA 6.37 – Caminho real percorrido pelo robô (Teste #10) (Escala 1:7,02) ...................89 FIGURA 6.38 – Teste #11 utilizando-se a interface gráfica....................................................90 FIGURA 6.39 – Caminho real percorrido pelo robô (Teste #11) (Escala 1:12,76) .................90 FIGURA 6.40 – Fluxograma da lógica de programação do circuito de IHM..........................91 FIGURA 6.41 – Fluxograma da lógica de programação do circuito do robô ..........................92 FIGURA 7.1 – Ação dos Motores/ Robô de Acordo com o Comando Recebido....................95 FIGURA 7.2 – Pacote de Dados Transmitido do PC ao Circuito de IHM (padrão #01) .........96 FIGURA 7.3 – Pacote de Dados Transmitido do PC ao Circuito de IHM (padrão #02) .........97 FIGURA 7.4 – Pacote de Dados Transmitido do PC ao Circuito de IHM (padrão #03) .........97 FIGURA 7.5 – Pacote de Dados Transmitido do Circuito de IHM ao PC...............................98 FIGURA 7.6 – Exemplo de Codificação dos Dados................................................................99 FIGURA 7.7 – Processo de Codificação e decodificação dos Dados ....................................100 FIGURA 7.8 – Pacote de Dados Transmitido do Circuito de IHM ao Robô (padrão #01) ...102 FIGURA 7.9 – Pacote de Dados Transmitido do Circuito de IHM ao Robô (padrão #02) ...103 FIGURA 7.10 – Pacote de Dados Transmitido do Circuito de IHM ao Robô (padrão #03) .103 FIGURA 7.11 – Pacote de Dados Transmitido do Robô ao Circuito de IHM.......................104 FIGURA 7.12 – Visão Geral do Fluxo de Dados Trafegados no Sistema.............................105 FIGURA 7.13 – Tela do Software RComSerial v1.1 e o Resultado Obtido (Parte 1) ...........106 FIGURA 7.14 – Diagrama Elétrico do Circuito Teste da Comunicação Serial (Parte 1) ......106 FIGURA 7.15 – Tela do Software RComSerial v1.1 e o Resultado Obtido (Parte 2) ...........107 FIGURA 7.16 – Diagrama Elétrico do Circuito Teste da Comunicação Serial (Parte 2) ......108 FIGURA 7.17 – Fluxograma da Lógica Utilizada na Comunicação Serial (Parte 2) ............108 FIGURA 7.18 – Fluxograma da Lógica Utilizada na Comunicação Serial (Parte 3) ............109 FIGURA 7.19 – Tela em Execução do Programa Desenvolvido...........................................110 FIGURA 7.20 – Onda Quadrada Transmitida (CH1) vs. Onda Quadrada Recebida (CH2)..110 FIGURA 7.21 – Diagrama Elétrico do Circuito Comunicação Unidirecional (Parte 1)........111 FIGURA 7.22 – Diagrama Elétrico do Circuito Comunicação Unidirecional (Parte 2)........112 FIGURA 7.23 – Fluxograma da Lógica Utilizada para o Módulo do Transmissor...............112 FIGURA 7.24 – Fluxograma da Lógica Utilizada para o Módulo do Receptor ....................113 FIGURA 7.25 – Tela do Programa Desenvolvido em Execução...........................................114 FIGURA 7.26 – Diagrama Elétrico do Teste de Comunicação por meio de UART .............115
- 11. vii FIGURA 7.27 – Diagrama Elétrico do Circuito Acionamento dos Motores (Parte 1) ..........115 FIGURA 7.28 – Fluxograma da Lógica Utilizada para o Módulo do Transmissor...............116 FIGURA 7.29 – Fluxograma da Lógica Utilizada para o Módulo do Receptor ....................117 FIGURA 7.30 – Tela do Programa Desenvolvido em Execução...........................................118 FIGURA 7.31 – Pacote de Dados Enviado pelo PC ao Circuito de Transmissão..................118 FIGURA 7.32 – Pacote de Dados Original e Codificado.......................................................118 FIGURA 7.33 – Diagrama Elétrico do Circuito Acionamento dos Motores (Parte 2) ..........120 FIGURA 7.34 – Diagrama Elétrico do Circuito de Comunicação Bidirecional via RF ........121 FIGURA 7.35 – Fluxograma da Lógica Utilizada para o Módulo da IHM ...........................122 FIGURA 7.36 – Fluxograma da Lógica Utilizada para o Módulo do Robô ..........................123 FIGURA 7.37 – Tela do Programa Desenvolvido em Execução...........................................123 FIGURA 7.38 – Conceito Seletivo Adotado para a Comunicação Bidirecional....................124 FIGURA 8.1 – Diagrama Elétrico do Circuito de Gravação do Microcontrolador ...............126 FIGURA 8.2 – Estrutura inicial (ciba-tool)............................................................................129 FIGURA 8.3 – Estrutura final (madeira balsa).......................................................................129 FIGURA 8.4 – Gráfico do custo total do sistema (considerando os motores).......................132 FIGURA 8.5 – Gráfico do custo total do sistema (desconsiderando os motores)..................132
- 12. viii LISTA DE TABELAS TABELA 2.1 – Resumo dos principais artigos analisados ........................................................7 TABELA 4.1 – Componentes do Módulo de Interface com o Usuário ...................................15 TABELA 4.2 – Componentes do Módulo do Robô.................................................................15 TABELA 4.3 – Principais Características Técnicas dos Módulos de Comunicação ...............17 TABELA 4.4 – Comparativo (Principais Tipos de Antenas em Projetos Compactos)............21 TABELA 4.5 – Parâmetros Relacionados ao Esquema de Confecção da Antena ...................22 TABELA 4.6 – Principais Características do Microcontrolador AT90S8515.........................23 TABELA 4.7 – Funções dos Principais Pinos do L298 ...........................................................27 TABELA 4.8 – Principais Características Técnicas dos Motores............................................30 TABELA 4.9 – Características Técnicas do Motor Vs. Valores Mínimos Requeridos...........31 TABELA 4.10 – Resultados Obtidos no Teste do Sonar (Parte 1) ..........................................38 TABELA 4.11 – Resultados Obtidos no Teste do Sonar (Parte 2) ..........................................43 TABELA 4.12 – Calibragem dos Resultados obtidos no Teste do Sonar (Parte 2).................44 TABELA 5.1 – Cálculo da posição e direção do robô.............................................................53 TABELA 6.1 – Dados corrigidos – recebidos pela porta serial ...............................................57 TABELA 6.2 – ângulo calculado vs. parâmetros de ajustes do robô.......................................61 TABELA 6.3 – ângulo calculado vs. quantidade de pulsos lidos ............................................62 TABELA 6.4 – Testes de verificação do comando enviado vs. executado pelo robô .............64 TABELA 6.5 – Testes do comando enviado vs. executado pelo robô (ângulo de giro)..........65 TABELA 6.6 – Distância calculada vs. quantidade de pulsos lidos ........................................66 TABELA 6.7 – Testes do comando enviado vs. executado pelo robô (linha reta) ..................67 TABELA 6.8 – Testes de desempenho sem sistema de compensação de velocidade..............74 TABELA 6.9 – Testes de desempenho com sistema de compensação de velocidade.............75 TABELA 7.1 – Ação dos Motores/ Robô de Acordo com o Comando Recebido...................94 TABELA 7.2 – Relação entre Bits de Dados Originais e Codificados ....................................98 TABELA 7.3 – Valores Codificados vs. Valores Decodificados...........................................100 TABELA 7.4 – Relação entre os Comandos e os Movimentos dos Motores ........................119 TABELA 8.1 – Lista de Componentes do Circuito de Gravação (Microcontrolador) ..........127 TABELA 8.2 – Estrutura mecânica (tipos de materiais avaliados)........................................128 TABELA 8.3 – Lista de Componentes/ Materiais Utilizados................................................130
- 13. ix LISTA DE ABREVIATURAS E SIGLAS SIGLA SIGNIFICADO ORIGINAL TRADUÇÃO AF Audio Frequency Freqüência de Áudio AIBO Artificially Intelligent roBOt Robô com Inteligência Artificial ALU Arithmetic Logic Unit Unidade Lógica Aritmética AM Amplitude Modulation Modulação por Amplitude API Application Program Interface Interface de Programação de Aplicativos AWG American Wire Gauge Calibrador de Fio Americano BIN Binary Binário BPS Bits Per Second Bits Por Segundo CC Direct Current (DC) Corrente Contínua CI Integrated Circuit Circuito Integrado DEC Decimal Decimal EEPROM Electrically Erasable Programmable Read-Only Memory Memória Somente de Leitura Programável Apagável Eletricamente EHF Ultra High Frequency Freqüência Extremamente Alta ELF Extremely Low Frequency Freqüência Extremamente Baixa EOD Explosive Ordnance Disposal Arma de Eliminação de Explosivo E/S Entrada/ Saída --- GND Ground Terra HEX Hexa Hexadecimal HF High Frequency Freqüência Alta IHM Interface Human-Machine Interface Homem-Máquina IR Infrared Infravermelho I/O Input/Output Entrada/Saída
- 14. x SIGLA SIGNIFICADO ORIGINAL TRADUÇÃO LED Light Emitting Diode Diodo Emissor de Luz LF Low Frequency Freqüência Baixa MF Medium Frequency Freqüência Média MIPS Million Instructions Per Second Milhões de Instruções Por Segundo MTTF Mean Time to Failure Tempo Médio para Falha NASA National Aeronautics and Space Administration Administração Nacional de Aeronáutica e Espaço PC Personal Computer Computador Pessoal PCI Placa de Circuito Impresso --- PI Proportional Integral Proporcional Integral PWM Pulse Width Modulation Modulação por Largura de Pulso QTD Quantidade --- RF Radio Frequency Radiofreqüência RISC Reduced Instruction Set Computer Computador com Conjunto de Instruções Reduzido RPM Rotations Per Minute Rotações Por Minuto SHF Super High Frequency Freqüência Super Alta SONAR Sound Navigation And Ranging Navegação e Alcance do Som SPI Serial Peripheral Interface Interface Serial Periférica SRAM Static Random Access Memory Memoria estática de acesso aleatório UART Universal Asynchronous Receiver and Transmitter Receptor e Transmissor Assíncrono Universal UBRR UART Baud Rate Register Registrador de Taxa de Transmissão da UART UDR UART I/O Data Register Registrador de E/S de Dados da UART USR UART Status Register Registrador de Status da UART UHF Ultra High Frequency Freqüência Ultra Alta UV Ultraviolet Ultravioleta
- 15. xi SIGLA SIGNIFICADO ORIGINAL TRADUÇÃO VHF Very High Frequency Freqüência Muito Alta VLF Very Low Frequency Freqüência Muito Baixa XTAL Cristal (Oscillator) Cristal (Oscilador)
- 16. xii SUMÁRIO 1 INTRODUÇÃO..................................................................................................................1 1.1 VISÃO GERAL..........................................................................................................2 1.2 OBJETIVO.................................................................................................................6 2 REVISÃO BIBLIOGRÁFICA...........................................................................................7 3 SISTEMA.........................................................................................................................10 3.1 DIAGRAMA GERAL DO SISTEMA.....................................................................10 3.2 BREVE DESCRIÇÃO DO FUNCIONAMENTO DO SISTEMA..........................13 4 COMPONENTES DO SISTEMA....................................................................................15 4.1 MÓDULOS DE COMUNICAÇÃO.........................................................................16 4.1.1 Módulo de Transmissão ...................................................................................18 4.1.2 Módulo de Recepção ........................................................................................19 4.1.3 Antena...............................................................................................................20 4.2 MICROCONTROLADOR.......................................................................................22 4.2.1 Receptor e Transmissor Assíncrono Universal (UART)..................................24 4.2.1.1 Transmissão de Dados..................................................................................24 4.2.1.2 Recepção de Dados.......................................................................................25 4.2.1.3 Gerador de Taxa de Transmissão .................................................................25 4.3 MÓDULO DE POTÊNCIA .....................................................................................26 4.4 MOTORES DE CORRENTE CONTÍNUA.............................................................27 4.4.1 Procedimento Para Escolha dos Motores .........................................................27 4.4.1.1 Velocidade Linear.........................................................................................28 4.4.1.2 Torque...........................................................................................................29 4.4.2 Características Técnicas dos Motores Utilizados.............................................30 4.5 SENSORES ..............................................................................................................32 4.5.1 Sensores de Ultrasom .......................................................................................33 4.5.1.1 Princípio de Funcionamento.........................................................................34 4.5.1.2 Considerações Importantes...........................................................................34 4.5.1.3 Descrição do Módulo de Sonar Adotado......................................................35 4.5.2 Sensores de Velocidade/ Posição .....................................................................35 4.5.2.1 Descrição do Sensor de Velocidade Adotado...............................................36 4.5.2.2 Princípio de Funcionamento.........................................................................37
- 17. xiii 4.5.3 Alguns Testes Realizados com os Sensores .....................................................38 4.5.3.1 Teste de Funcionamento do Sensor de Ultrasom (Parte 1) ..........................38 4.5.3.2 Teste de Funcionamento do Sensor de Ultrasom (Parte 2) ..........................39 4.5.3.3 Teste de Funcionamento do Sensor de Velocidade......................................45 5 ODOMETRIA ..................................................................................................................48 5.1 FONTES DE ERRO NA ODOMETRIA .................................................................51 5.2 CÁLCULOS E TESTES ..........................................................................................52 6 PROGRAMAÇÃO E SOFTWARE DE CONTROLE ....................................................55 6.1 COMUNICAÇÃO SERIAL.....................................................................................56 6.2 PARÂMETROS DE AJUSTE DO ROBÔ...............................................................59 6.3 CONTROLE DOS MOTORES................................................................................70 6.3.1 Controle da Velocidade ....................................................................................70 6.3.2 Controle da Quantidade de Rotações................................................................71 6.3.3 Compensação da Velocidade............................................................................72 6.4 INTERFACE GRÁFICA..........................................................................................76 6.5 PROGRAMAÇÃO DOS MICROCONTROLADORES.........................................91 7 SISTEMA DE COMUNICAÇÃO ...................................................................................93 7.1 COMUNICAÇÃO SERIAL.....................................................................................93 7.1.1 Protocolo de Comunicação (PC ↔ Circuito de IHM)......................................94 7.1.1.1 Sentido do fluxo de dados (PC → Circuito de IHM) ...................................94 7.1.1.2 Sentido do fluxo de dados (PC ← Circuito de IHM) ...................................97 7.2 COMUNICAÇÃO BIDIRECIONAL VIA RF ........................................................98 7.2.1 Protocolo de Comunicação (Circuito de IHM ↔ Robô)................................101 7.2.1.1 Sentido do fluxo de dados (Circuito de IHM → Robô) .............................101 7.2.1.2 Sentido do fluxo de dados (Circuito de IHM ← Robô) .............................103 7.3 ALGUNS TESTES DE COMUNICAÇÃO REALIZADOS.................................105 7.3.1 Comunicação Serial (Parte 1).........................................................................105 7.3.2 Comunicação Serial (Parte 2).........................................................................107 7.3.3 Comunicação Serial (Parte 3).........................................................................109 7.3.4 Comunicação Unidirecional Via RF (Parte 1)................................................110 7.3.5 Comunicação Unidirecional Via RF (Parte 2)................................................111 7.3.6 Acionamento dos Motores (Parte 1)...............................................................115 7.3.7 Acionamento dos Motores (Parte 2)...............................................................120 7.3.8 Comunicação Bidirecional Via RF.................................................................121
- 18. xiv 8 INFORMAÇÕES ADICIONAIS ...................................................................................126 8.1 CIRCUITO DE GRAVAÇÃO DO MICROCONTROLADOR ............................126 8.2 ESTRUTURA MECÂNICA ..................................................................................127 8.3 CUSTO TOTAL DO SISTEMA............................................................................129 9 CONCLUSÃO................................................................................................................133 10 ANEXOS....................................................................................................................136 10.1 LISTAGEM DOS PROGRAMAS.........................................................................136 10.1.1 Programa Comunicação Serial (Parte 2) ........................................................136 10.1.2 Programa Comunicação Serial (Parte 3) ........................................................137 10.1.3 Programa Comunicação Unidirecional Via RF (Transmissor).......................140 10.1.4 Programa Comunicação Unidirecional Via RF (Receptor)............................142 10.1.5 Programa Teste do Funcionamento do Sensor de Ultrasom (Parte 2)............144 10.1.6 Programa Teste para o Acionamento dos Motores (Transmissor) .................146 10.1.7 Programa Teste para o Acionamento dos Motores (Receptor) ......................149 10.1.8 Programa Teste para o Acionamento dos Motores.........................................152 10.1.9 Programa Teste da Comunicação Bidirecional (IHM)...................................158 10.1.10 Programa Teste da Comunicação Bidirecional (Robô)..............................163 10.1.11 Programa de Teste do Sensor de Velocidade .............................................167 10.1.12 Programa de Controle do Robô ..................................................................169 10.1.13 Programa Completo do Circuito de IHM ...................................................207 10.1.14 Programa Completo do Circuito do Robô..................................................212 11 REFERÊNCIAS .........................................................................................................224
- 19. 1 1 INTRODUÇÃO De uma forma geral, é difícil associar a palavra simplicidade quando as pessoas são estimuladas a tentar compreender a teoria associada à construção e ao próprio funcionamento dos robôs. Afinal, a robótica envolve os mais variados conceitos nas áreas de mecânica, eletrônica e informática. A complexidade do sistema está intrinsecamente ligada ao objetivo para o qual o robô está sendo projetado. Hoje em dia, os conceitos de robótica são utilizados em uma série de aplicações na indústria, educação e também em pesquisas aeroespaciais. São exemplos de aplicações: 1. Situações que possam acarretar algum perigo à saúde humana: exploração de ambientes hostis onde há presença de gases tóxicos [1], inspeção de tubulações visando detecção de vazamentos e medições de concentração de gases [2] [3] [4], temperatura elevada ou exposição à radiação [5] [6], detecção de bombas em zonas de guerra e limpeza de reatores nucleares [7]; 2. Organizações que realizam competições de Futebol de Robôs, com o objetivo de incentivar o desenvolvimento da robótica, da visão computacional e da inteligência artificial [8] [9] [10] [11]; 3. Processos de manufatura com o objetivo de evitar desperdícios, aumentando a eficiência do sistema. Com o intuito de auxiliar de uma forma prática no desenvolvimento e projeto de robôs móveis, apresentando um sistema flexível, que possibilite a adição de novos componentes ao sistema, expandindo assim a funcionalidade e aplicabilidade do robô, como por exemplo, sensores de proximidade (para a detecção de obstáculos), sensores de temperatura, sensores ultra-sônicos, sensores para a distinção de odores, entre outros [12] [13]. O trabalho foi organizado da seguinte maneira: • Capítulo 1: além de um breve resumo do trabalho, é dada uma visão geral das principais etapas envolvidas no desenvolvimento e projeto de um robô, assim como alguns exemplos de aplicações bem sucedidas nessa área de estudo. Os objetivos do sistema projetado, também são apresentados. • Capítulo 2: é mostrado uma breve revisão bibliográfica, procurando demonstrar alguns dos trabalhos mais importantes e que de alguma forma contribuíram para o desenvolvimento desse projeto
- 20. 2 • Capítulo 3: além de uma breve descrição do funcionamento do sistema, é mostrado também o diagrama geral do sistema, tanto o diagrama em blocos como o circuito elétrico completo proposto. • Capítulo 4: os componentes utilizados na construção do sistema são descritos e justificados em sua maioria, assim como é dada uma breve introdução sobre sensores e uma abordagem mais aprofundada nos tipos de sensores utilizados no projeto. • Capítulo 5: neste capítulo é abordado o conceito utilizado para realizar o mapeamento do caminho percorrido pelo robô (odometria). • Capítulo 6: é explicado o funcionamento do software de controle e os principais conceitos envolvidos na lógica de programação utilizada, tanto para o desenvolvimento da interface homem-máquina, quanto para o controle do robô. • Capítulo 7: é apresentado todo o sistema de comunicação utilizado, assim como os conceitos adotados no protocolo de comunicação. • Capítulo 8: o conceito da estrutura adotada, além dos tipos de materiais utilizados na construção do robô. O custo total do sistema também é abordado neste capítulo. • Capítulo 9: a conclusão geral do projeto proposto é apresentada. • Capítulo 10: é disponibilizada a listagem completa dos programas desenvolvidos ao longo do trabalho. • Capítulo 11: as referências bibliográficas, que muito colaboraram na conceituação e em todo o desenvolvimento do projeto. 1.1 VISÃO GERAL A Figura 1.1 tenta exemplificar em etapas e de uma forma bem ampla, o que está relacionado ao projeto de qualquer robô.
- 21. 3 FIGURA 1.1 – ETAPAS ENVOLVIDAS NA CONSTRUÇÃO DE UM ROBÔ A primeira etapa, a definição inicial, é extremamente importante. Antes de qualquer coisa é preciso ter em mente qual será a aplicação do robô e consequentemente, qual a sua estrutura. Nesta etapa serão respondidas perguntas como: qual o ambiente de navegação? qual o tipo do terreno? A Figura 1.2 apresenta alguns exemplos reais de aplicações na área científica. Nessa figura, é possível observar como é vasta a aplicação da robótica e em alguns casos extremamente importante, visto que se torna em algumas aplicações como uma segurança essencial à saúde humana. Abaixo é apresentada uma breve explicação sobre cada uma das aplicações demonstradas: • Desarmamento de Bombas (iRobot PackBot EOD)(1) : Sua missão é salvar vidas. É um robô resistente e leve, projetado para ajudar na eliminação de explosivos, procura de sobreviventes, resgate de reféns, entre outras tarefas. • Transporte (R-Gator – Autonomous Unmanned Ground Vehicle)(2) : O R- Gator é um robô que tem como objetivo servir a diversas atividades militares, 1 FONTE: http://www.irobot.com
- 22. 4 como por exemplo, ao transporte de equipamentos militares, exploração e até mesmo resgate. • Prestação de Serviços (Trilobite 2.0 Vacuum Cleaner)(3) : Outra aplicação bastante interessante que vem aumentando hoje em dia é a utilização da robótica no setor de prestação de serviços, esse robô tem a funcionalidade de um aspirador de pó autônomo. • Exploração (Mars Exploration Rover Mission)(4) : Esse é o melhor exemplo de uma aplicação de um robô explorador de ambientes desconhecidos e hostis. É um projeto da NASA que tem como objetivo principal pesquisar a possível existência de água no planeta Marte. Para isso, dois robôs foram enviados em 2003 para lá e ainda hoje estão explorando o Planeta Vermelho. • Entretenimento (AIBO® Entertainment Robot)(5) : AIBO o cãozinho desenvolvido pela Sony com o objetivo de divertir as pessoas. • Competições (Robocup – Futebol de Robôs)(6) : O objetivo principal dessa aplicação é o de aumentar o interesse de estudantes, proporcionando-lhes a possibilidade do aprendizado e da diversão ao mesmo tempo. 2 FONTE: http://www.irobot.com 3 FONTE: http://trilobite.electrolux.co.uk 4 FONTE: http://marsrovers.jpl.nasa.gov 5 FONTE: http://www.sony.net/Products/aibo/index.html 6 FONTE: http://www.robocup.org
- 23. 5 FIGURA 1.2 – EXEMPLOS DE APLICAÇÕES Definida a aplicação, o passo seguinte é definir o que o robô será capaz de fazer, ou seja, como será o seu sistema sensorial. Nessa etapa deve-se avaliar, para essa aplicação, se é essencial que: • o robô tenha sensores que possibilitem o mapeamento do ambiente; • que detecte objetos com o objetivo de evitar colisões; • que tenha um sistema de orientação próprio. Também nessa etapa é importante definir se o robô deve apresentar sistema de visão embarcado [14]. Portanto, serão definidas as características básicas do robô. Outra etapa importante é definir como será o controle e o processamento dos dados do robô: ele será autônomo, semi-autônomo, ou tele-operado? Basicamente, o nível de complexidade da lógica de programação do robô será definido nessa etapa. Definido o controle, a definição do sistema de comunicação é conseqüência. A próxima etapa é a definição dos atuadores, toda a movimentação do robô vai depender do tipo de atuador escolhido [15]. Por último, o sistema de alimentação, que precisa ser muito bem dimensionado, para que dê uma boa autonomia de funcionamento ao robô.
- 24. 6 Algumas considerações que são importantes nessas etapas de definição estão relacionadas com as características físicas de determinados componentes chaves do sistema, como microcontrolador (ou microprocessador), os módulos de comunicação e os motores. Apenas como exemplo, o microcontrolador é o “cérebro” do robô, sendo importante que a escolha desse componente seja bem estudada, para que no futuro não represente uma limitação na implantação física de técnicas de controle ou características específicas desejáveis para o robô na aplicação. Na Figura 1.1, apenas para dar uma noção incial, foi destacado em vermelho as principais características que o robô desenvolvido contém, onde todos detalhes estarão sendo apresentados no decorrer desse trabalho. 1.2 OBJETIVO O objetivo principal desse trabalho é o desenvolvimento de um robô móvel capaz de explorar ambientes hostis (ambientes que sejam prejudiciais à saúde do ser humano) sem a intervenção humana, com a capacidade de detectar obstáculos, flexível tanto em sua estrutura mecânica, quanto eletrônica, e que apresentasse resultados confiáveis, com qualidade e baixo custo.
- 25. 7 2 REVISÃO BIBLIOGRÁFICA O objetivo deste capítulo é o de expor de uma maneira macro e clara, alguns dos trabalhos considerados importantes e que de alguma forma contribuíram para o desenvolvimento desse projeto, de onde se extraiu algumas idéias e soluções para os diversos módulos desse trabalho. Através da Tabela 2.1, procurou-se sumarizar o conteúdo dos principais artigos, demonstrando a aplicação para o qual ele é proposto e os principais componentes envolvidos na aplicação prática das propostas desenvolvidas. Apenas como referência, foi adicionada nessa mesma tabela, as características equivalentes desse projeto proposto. TABELA 2.1 – RESUMO DOS PRINCIPAIS ARTIGOS ANALISADOS Aplicação Principal Locomoção Localização Unidade de Controle Comunicação Sensores Exploração Futebolde Robôs GuerradeRobôs MotordeCC MotordePasso BússolaDigital Odometria Câmera GPS Outros Microtontrolador PC RF Porfio Ultrasom Encoders/ Velocidade Infravermelho Contato Temperatura Outros 1 Construindo robôs autônomos para partidas de futebol: o Time Guaraná. [8] São apresentados os algorítmos usados na implementação do software de controle, iniciando pelo sistema de visão, partindo para o módulo responsável pela decisão da estratégia de jogo e por último, a plataforma de hardware utilizado. 2 Construção de robôs jogadores de futebol. [16] São apresentados os conceitos utilizados na construção de um robô utilizado em competições de futebol de robôs, além de um detalhamento dos sistemas de comunicação e movimentação do robô. 3 Micro-Robot Soccer Team - Mechanical and Hardware Implementation. [11] Semelhante ao artigo anterior, os conceitos aplicados na construção de um robô utilizado em competições de futebol de robôs, como por exemplo, os conceitos da arquitetura, do sistema de movimentação e comunicação são apresentados. 4 Controles de velocidade e trajetória para o robô Sonic Shark e sensoriamento por ultra-som. [17] Este trabalho consiste no desenvolvimento de um sistema de controles de velocidade, trajetória e sensoriamento por ultra-som para uma plataforma móvel rádio comandada. 5 Navegação de robôs móveis em ambientes desconhecidos utilizando sonares de ultra-som. [18] São apresentados métodos para a navegação autônoma de robôs móveis em ambientes sobre os quais possui-se pouca ou nenhuma informação. O sistema opera em tempo real, utilizando os sonares do robô para fazer a detecção dos obstáculos, e interage com o sistema de controle do robô para rastreamento das trajetórias desejadas. 6 Implementation of an Intelligent Roving Robot Using Multiple Sensors. [12] Conceitos de ativação por meio de comando de voz, além de um interfaceamento com diversos sensores ao mesmo tempo, apresentam através deste artigo, um robô flexível e simples ao mesmo tempo. 7 Comportamentos reativos para seguir pistas em um robô móvel guiado por visão. [19] Este artigo descreve o projeto e a implementação de um sistema de controle para um robô móvel autônomo dotado de percepção, capaz de seguir um caminho desenhado na superfície sobre a qual o robô se move e evita colisões. 8 Sistema para navegação e guiagem de robôs móveis autônomos. [20] Neste artigo, é apresentado um sistema para navegação e guiagem de robôs móveis autônomos, utilizando-se encoders e bússola digital. A informação de posição e atitude do veículo é então utilizada por um sistema de guiagem, baseado em controlador tipo fuzzy. # Título do Trabalho Resumo do Trabalho Trabalho Proposto (referência) Os trabalhos 1, 2 e 3, conforme sumarizados na Tabela 2.1, estão relacionados com aplicação e desenvolvimento de robôs para serem utilizados em competições de futebol de
- 26. 8 robôs. O artigo 1, descreve de uma maneira bem completa os conceitos utilizados em uma aplicação desse tipo, como por exemplo, o sistema de visão utilizado para a localização dos robôs e da bola, são realizados através de uma câmera externa ao robô. Nesse tipo de aplicação além da importância do hardware, em termos de velocidade de resposta e controle dos robôs, o software utilizado para a identificação e rastreamento em tempo real dos robôs e da bola, assim como a estratégia do jogo responsável pela determinação do novo caminho a ser perseguido pelo robô, são igualmente importantes para que o sistema apresente um bom resultado. Os artigos 2 e 3, apresentam conceitos mais detalhados em termos de hardware e estrutura física dos robôs. Existe uma grande semelhança entre o sistema apresentado principalmente no artigo 2, com o deste trabalho, visto que os conceitos adotados em termos de controle (microcontrolador), comunicação RF e circuito de potência (ponte H), são basicamente os mesmos. O trabalho 4, é uma monografia que consiste no desenvolvimento de um sistema de controle de velocidade, trajetória e sensoriamento por ultra-som para uma plataforma móvel rádio comandada. Este robô foi desenvolvido para participar de competições de guerra de robôs, onde é necessário possuir a capacidade de operar em situações de alto risco de colisões, onde ocasionalmente poderão ser exigidas manobras ágeis em modalidades de ataque e defesa. Os conceitos de localização, definição de trajetória e detecção de obstáculos foram bem detalhados neste trabalho escrito. O trabalho apresentado através do artigo 5, procurou descrever um método relativamente simples de planejamento de trajetórias de robôs móveis em ambientes desconhecidos. Para isso foi utilizado sensores de ultrasom para a detecção de obstáculos, e para a localização do robô, além de encoders, sendo que a posição e orientação inicial eram conhecidas. Apesar do principal problema encontrado que foi referente ao uso dos sonares para detecção dos obstáculos, dada a sua imprecisão inerente, os resultados apresentados foram bastante satisfatórios. O artigo 6, exemplifica uma aplicação simples e flexível, onde uma grande quantidade de sensores é utilizada em um mesmo robô, entre eles, sensores de ultrasom e de contato, para a detecção de obstáculos, sensores de corrente para a proteção dos motores e sensores de temperatura para a detecção de super aquecimento. O artigo 7, descreve o projeto e a implementação de um sistema de controle para um robô móvel autônomo dotado de percepção, onde baseado em informações recebidas de sensores infravermelhos e informações previamente definidas em hardware no robô, ele é
- 27. 9 capaz de seguir um caminho desenhado na superfície e evitar colisões. A arquitetura usada é composta por quatro módulos, sendo: módulo de aquisição de imagens, módulo de detecção de cores, módulo de identificação da posição, direção e trajetória do robô, e por último o módulo de controle do robô. O artigo 8, apresenta um sistema para navegação e guiagem de robôs móveis autônomos. Para a navegação, utilizou-se integração via filtro de Kalman, conceitos de odometria, pelo uso de encoders e bússola digital.
- 28. 10 3 SISTEMA 3.1 DIAGRAMA GERAL DO SISTEMA O sistema projetado pode ser dividido em duas partes. A Figura 3.1 ilustra o diagrama em blocos da primeira parte. FIGURA 3.1 – DIAGRAMA EM BLOCOS DO SISTEMA DE INTERFACE COM O USUÁRIO Essa primeira parte do sistema está relacionada com o módulo de interface com o usuário. Contempla uma Interface Homem-Máquina (IHM), ou seja, um computador pessoal, microcontrolador e os circuitos de transmissão e recepção. O diagrama elétrico da primeira parte do sistema é apresentado na Figura 3.2. Como pode ser observado, existe uma separação em seis blocos. No primeiro bloco temos o circuito de alimentação constituído de regulador de tensão que converte a tensão de entrada de 9V em nível TTL, ou seja, 5V. O segundo bloco, o microcontrolador, tem apenas a utilização de alguns componentes passivos, necessários para o funcionamento do microcontrolador, que são utilizados para a alimentação e geração de clock.
- 29. 11 FIGURA 3.2 – DIAGRAMA ELÉTRICO DO SISTEMA DE INTERFACE COM O USUÁRIO O terceiro bloco, circuito de comunicação padrão RS-232, é responsável pelo interfaceamento entre o computador pessoal (PC) e o microcontrolador, o qual utiliza um circuito integrado (CI) MAX232, que estabelece a conversão dos níveis de tensão do microcontrolador (0V/+5V) para os níveis de tensão da porta serial do computador, padrão RS232 (-12V/+12V) e vice-versa [21]. O quarto bloco, receptor de radiofreqüência (RF), contempla o módulo de recepção de dados por meio de radiofreqüência, que como pode ser observado, possui apenas as ligações para a alimentação, terra, antena externa e dados. O quinto bloco, chamado de buffer, possui um circuito integrado 74244, que nada mais é do que um buffer de três-estados, utilizado para controlar o fluxo de dados entre o receptor RF e o PC, e entre o PC e o microcontrolador [22]. E por último o sexto bloco, transmissor RF, contempla o módulo de transmissão de dados por meio de radiofreqüência, que assim como o receptor RF é extremamente simples, possuindo apenas as ligações para a alimentação, terra, antena externa e dados, sendo que esta última é ligada diretamente ao microcontrolador. Como explicado anteriormente, o sistema projetado pode ser dividido em duas partes, a Figura 3.3 ilustra o diagrama em blocos da segunda parte.
- 30. 12 FIGURA 3.3 – DIAGRAMA EM BLOCOS DO ROBÔ Essa segunda parte do sistema está relacionada com o circuito do robô, que contempla um microcontrolador, os módulos de transmissão e recepção, circuito de potência, os atuadores e os sensores. O diagrama elétrico da segunda parte do sistema é apresentado na Figura 3.4. Nessa figura, da mesma forma como explicado anteriormente, pode ser observado que existe uma separação em seis blocos. Os blocos de: alimentação, microcontrolador, receptor e transmissor RF, possuem a mesma função que a apresentada no sistema de interface com o usuário. As exceções nessa parte do sistema, estão no circuito de potência e módulo dos sensores. O circuito de potência, apresenta basicamente uma ponte H em circuito integrado com o objetivo de fornecer corrente suficiente para acionar os atuadores. O módulo dos sensores apresenta o circuito de interface para o sensor de ultra-som adicionado ao sistema e os sensores de velocidade, utilizados para o mapeamento do caminho percorrido pelo robô. Juntamente com os sensores de velocidade, é utilizado um buffer (CI 74244), utilizado para o controle liga/ desliga dos sensores, este que é comandado pelo microcontrolador.
- 31. 13 FIGURA 3.4 – DIAGRAMA ELÉTRICO DO ROBÔ 3.2 BREVE DESCRIÇÃO DO FUNCIONAMENTO DO SISTEMA Para dar uma visão geral do funcionamento do sistema, a Figura 3.5 tenta ilustrar o conceito adotado. Após iniciado o funcionamento do sistema, com base nas informações obtidas pelos sensores e transmitidas ao microcontrolador do robô, essas informações são processadas, codificadas e enviadas para o circuito de interface do usuário com o PC, através de uma comunicação por meio de radiofreqüência. Para isso, os dados enviados pelo microcontrolador são decodificados e posteriormente enviados ao PC através de um circuito integrado que faz a conversão dos níveis de tensão do microcontrolador para os níveis de tensão da porta serial do PC. As informações recebidas são apresentadas ao usuário, neste instante o sistema fica aguardando uma nova tomada de decisão do usuário, e assim que um
- 32. 14 novo comando é selecionado e transmitido pela porta serial ao circuito de IHM, o microcontrolador codifica os dados recebidos e envia ao robô através de uma comunicação por meio de radiofreqüência. Por último, da mesma forma como no caso anterior, o microcontrolador processa e decodifica as informações recebidas, acionando os sensores de velocidade e de obstáculo, assim como o circuito de potência, para que esse possa fornecer energia suficiente para o acionamento dos atuadores. E assim, esse ciclo se repete continuamente. FIGURA 3.5 – CICLO DE FUNCIONAMENTO
- 33. 15 4 COMPONENTES DO SISTEMA A seguir é dada uma breve descrição dos componentes utilizados no projeto, assim como uma breve explicação a respeito da escolha dos principais componentes. A Tabela 4.1 lista os componentes utilizados no circuito de interface com o usuário, conforme já ilustrados no circuito elétrico apresentado na Figura 3.2. TABELA 4.1 – COMPONENTES DO MÓDULO DE INTERFACE COM O USUÁRIO Designação Nomenclatura(7) Fabricante Valor/Unid. Qtd Custo(8) (R$) Microcontrolador AT90S8515 Atmel - 1 15,00 RS232 Transceiver MAX232 Maxim - 1 2,50 Buffer de Três-Estados HD74HC244 Hitachi - 1 1,30 Receptor RF RR3 Telecontrolli 433,92MHz 1 17,50 Transmissor RF RT4 Telecontrolli 433,92MHz 1 17,50 Cristal (Xtal) Q1 KDS 4MHz 1 1,30 Capacitor (Cerâmico) C1 e C2 Thonson 27pF 2 0,40 Capacitor (Cerâmico) C3 Thonson 100nF 1 0,20 Capacitor (Eletrolítico) C4, C5, C6 e C7 Thonson 1µF 4 0,80 Resistor R1 Acel 300 1 0,05 Regulador de Tensão 7805L STMicroelectronics 5V 1 1,00 LED LED1 Cons. Vermelho 9 10,80 A Tabela 4.2 lista os componentes utilizados no circuito do robô, conforme já ilustrados no circuito elétrico apresentado na Figura 3.4. TABELA 4.2 – COMPONENTES DO MÓDULO DO ROBÔ Designação Nomenclatura(9) Fabricante Valor/Unid. Qtd Custo(10) (R$) Microcontrolador AT90S8515 Atmel - 1 15,00 Ponte H (Driver) L298N STMicroelectronics - 1 12,30 Receptor RF RR3 Telecontrolli 433,92MHz 1 17,50 7 Nomenclatura baseada no circuito elétrico apresentado na Figura 3.2 8 Valor médio aproximado encontrado na Região Sudeste (São Paulo, 2006) 9 Nomenclatura baseada no circuito elétrico apresentado na Figura 3.4 10 Valor médio aproximado encontrado na Região Sudeste (São Paulo, 2006)
- 34. 16 Designação Nomenclatura(9) Fabricante Valor/Unid. Qtd Custo(10) (R$) Transmissor RF RT4 Telecontrolli 433,92MHz 1 17,50 Cristal (Xtal) Q1 KDS 4MHz 1 1,30 Capacitor (Cerâmico) C1 e C2 Thonson 27pF 2 0,40 Capacitor (Cerâmico) C3 Thonson 100nF 1 0,20 Capacitor (Cerâmico) C4 e C5 Thonson 33pF 2 0,40 Resistor R1 e R2 Acel 27 2 0,10 Resistor R3 Acel 300 1 0,05 Resistor R4 e R6 Acel 2,7k 2 0,10 Resistor R5 e R7 Acel 10k 2 0,10 Regulador de Tensão 7805L STMicroelectronics 5V 1 1,00 LED LED1 Cons. Vermelho 1 1,20 Motores CC Faulhaber 1516E012S 2 340,00(11) Redutor M1 e M2 Faulhaber 15/3K 41:1 2 510,00(11) Buffer Três-Estados HD74HC244 Hitachi - 1 1,30 Sensor de Velocidade KMI18/2 NXP - 2 30,00(12) Sensor de Ultrasom SONAR Tato Eletrônicos - 1 50,00(13) A seguir são apresentados maiores detalhes dos principais componentes e as principais razões que levaram à escolha desses componentes. 4.1 MÓDULOS DE COMUNICAÇÃO Em momento algum do projeto foi considerada a possibilidade de se desenvolver os módulos de comunicação, mesmo no início do desenvolvimento do projeto, onde se enfrentou muita dificuldade para encontrar no mercado doméstico os módulos que seriam viáveis para a execução do projeto a um custo acessível. A necessidade de operar em freqüências altas torna o circuito muito crítico e de difícil manuseio sem o equipamento necessário [23]. Abaixo, são listados alguns dos fatores que foram considerados importantes durante a escolha dos módulos de comunicação: 11 FONTE: motores@martebal.com.br (Divisão Faulhaber do Brasil, Santa Rita do Sapucaí, Minas Gerais, 2006) 12 FONTE: http://www.nxp.com/ (NXP Semiconducters, 2007) 13 FONTE: http://www.tato.ind.br/ (Tato Eletrônicos, São Paulo, 2006)
- 35. 17 • baixo custo; • freqüência alta (possibilitando uma boa imunidade a ruídos e interferências); • não requer nenhum tipo de regulagem; • baixos níveis de tensão e corrente; • formato de transmissão/ recepção dos dados (digital); • tamanho/ peso; • alcance/ potência/ sensibilidade; • confiabilidade; • velocidade de transmissão/ recepção (taxa de dados). Na Tabela 4.3, é mostrado um comparativo de algumas características dos principais módulos de comunicação analisados no mercado. TABELA 4.3 – PRINCIPAIS CARACTERÍSTICAS TÉCNICAS DOS MÓDULOS DE COMUNICAÇÃO Fabricante Modelo Descrição VDC (V) Is (mA) Freq. (MHz) Potência/ Sensibilid. (dBm) Taxa de Dados (kbit/s) Custo (R$) Telecontrolli RT4 (14) Transmis. 2-14 4,0 433,92 +7 9,6 17,50 Telecontrolli RR3 (14) Receptor 5,0 2,5 433,92 -103 9,6 17,50 Radiometrix TX2 (15) Transmis. 4-6 10,0 433,92 +9 40,0 59,55 Radiometrix RX2 (15) Receptor 5,0 13,0 433,92 -100 40,0 129,03 Wenshing Electronics TWS(16) Transmis. 3-12 9,5 433,92 +8,8 8,0 30,00 Wenshing Electronics RWS (16) Receptor 5,0 7,5 433,92 -116 4,8 30,00 Keymark Technology TXB(17) Transmis. 3,0 10-20,0 434,00 +6,0 1,0 65,00 Keymark Technology RXC (17) Receptor 3,0 9,0 434,00 -100 1,0 65,00 14 FONTE: http://www.telecontrolli.com (Telecontrolli) 15 FONTE: http://www.radiometrix.com (Radiometrix Ltd.) 16 FONTE: http://www.wenshing.com.tw (Wenshing Electronics Co., Ltd.) 17 FONTE: http://www.keymark.com.tw (Keymark Technology Co., Ltd.)
- 36. 18 Fabricante Modelo Descrição VDC (V) Is (mA) Freq. (MHz) Potência/ Sensibilid. (dBm) Taxa de Dados (kbit/s) Custo (R$) Linx Technology TXM (18) Transmis. 6-9,0 3-17,0 433,92 +4,0 10,0 250,00 Linx Technology RXM (18) Receptor 5,0 14,0 433,92 -100 10,0 330,00 Radiometrix BIM (19) Transceptor 4-5,5 14,0 (Tx) 18,0 (Rx) 433,92 +10 (Pot.) -101 (Sen.) 64,0 156,17 Laipac Tech. Inc. TRF (20) Transceptor 2-3,6 13,0 (Tx) 19,0 (Rx) 2.400 +4 (Pot.) -80 (Sen.) 1.000 70,00 Desde o início do projeto, tinha-se como objetivo, buscar um módulo de comunicação que fosse full-duplex (Transceptor, “Transceiver”), entretanto, os módulos disponíveis no mercado doméstico são muito caros. Dessa forma, optou-se em obter os pares de módulos de transmissão/ recepção independentes e assim desenvolver um sistema half-duplex. Com base nos dados informados anteriormente, os módulos de comunicação adotados para o projeto, foram os módulos da Telecontrolli de 433,92MHz, apesar das características técnicas serem claramente inferiores ao da Radiometrix, o custo também é, e a princípio as características técnicas atendem ao objetivo para o qual o projeto está sendo desenvolvido. 4.1.1 Módulo de Transmissão FIGURA 4.1 – MÓDULO DE TRANSMISSÃO(21) A Figura 4.1 apresenta uma imagem do módulo de transmissão adotado e a Figura 4.2, apresenta o equivalente circuito esquemático. O modelo utilizado é o RT4-433 da Telecontrolli, circuito híbrido que permite realizar uma transmissão por meio de radiofreqüência completa. Apresenta características elétricas 18 FONTE: http://www.linxtechnologies.com (Linx Technologies, Inc.) 19 FONTE: http://www.radiometrix.com (Radiometrix Ltd.) 20 FONTE: http://www.laipac.com (Laipac Technology Inc.) 21 FONTE: http://www.telecontrolli.com
- 37. 19 estáveis, graças à utilização da tecnologia de circuito híbrido a filme espesso “Thick film Hybrid”. FIGURA 4.2 – CIRCUITO ESQUEMÁTICO DO MÓDULO DE TRANSMISSÃO(22) 4.1.2 Módulo de Recepção FIGURA 4.3 – MÓDULO DE RECEPÇÃO(22) A Figura 4.3 apresenta uma imagem do módulo de Recepção adotado e a Figura 4.4, apresenta o equivalente diagrama em blocos. O modelo utilizado é o RR3-433 da Telecontrolli, receptor de dados de radiofreqüência super regenerativo. Apresenta alta estabilidade da freqüência, mesmo na presença de vibrações mecânicas, no manuseamento e em ambientes com grandes variações de temperatura. A exatidão da freqüência é muita alta, graças ao processo de ajuste a laser “laser trimming process”. 22 FONTE: http://www.telecontrolli.com
- 38. 20 FIGURA 4.4 – DIAGRAMA EM BLOCOS DO MÓDULO DE RECEPÇÃO(23) Apenas para ilustrar, a Figura 4.5 situa a freqüência de operação desses módulos da Telecontrolli no espectro eletromagnético. FIGURA 4.5 – ESPECTRO ELETROMAGNÉTICO(24) 4.1.3 Antena O alcance da comunicação por meio de radiofreqüência é amplamente variável e depende tanto do tipo de antena utilizado, quanto do ambiente em que o sistema está operando. Os três estilos de antenas de baixa potência mais comuns utilizados em projetos compactos de radiofreqüência são: • Laço (“Loop”); • Helicoidal (“Helical”); 23 FONTE: http://www.telecontrolli.com 24 FONTE: http://www.linxtechnologies.com (Linx Technologies, Inc. Application Note: AN-00100)
- 39. 21 • Chicote (“Whip”). A Tabela 4.4, ilustra um comparativo entre esses três estilos de antenas, que foi um dos determinantes utilizados para a seleção do tipo de antena adotado. TABELA 4.4 – COMPARATIVO (PRINCIPAIS TIPOS DE ANTENAS EM PROJETOS COMPACTOS)(25) Parâmetro Laço “Loop” Helicoidal “Helical” Chicote “Whip” Desempenho final ● ●● ●●● Facilidade da instalação do projeto ● ●● ●●● Tamanho ●● ●●● ● Imunidade a efeitos de proximidade ●●● ●● ● ● Regular ●● Bom ●●● Excelente A antena adotada no projeto foi a do tipo “Whip”, por possuir um desempenho excepcional e de ser facilmente desenhada e integrada ao projeto. No caso dos módulos de comunicação da Telecontrolli, o próprio fabricante recomenda esse tipo de antena. A Figura 4.6 apresenta o esquema de confecção da antena e a Tabela 4.5, mostra os parâmetros associados a esse esquema. FIGURA 4.6 – ESQUEMA DE CONFECÇÃO DA ANTENA(26) 25 FONTE: http://www.linxtechnologies.com (Linx Technologies, Inc. RM Series Receiver Module Data Guide) 26 FONTE: http://www.rfm.com (RF Monolithics, Inc. The RX Series SMT Hybrid ASH Receivers)
- 40. 22 TABELA 4.5 – PARÂMETROS RELACIONADOS AO ESQUEMA DE CONFECÇÃO DA ANTENA(27) Freqüência (MHz) Dimensão Unidade 303,825 418,000 433,920 916,500 A Milímetros 135,89 99,06 90,17 40,13 B Milímetros 25,40 15,24 15,24 10,16 C Milímetros 6,35 15,24 13,97 4,57 D Milímetros 93,98 68,58 60,96 25,40 E Milímetros 9,53 2,54 2,54 2,54 F Número de Voltas 4 16 15 7 G AWG #20 #22 #22 #24 Durante alguns testes, a antena utilizada foi apenas um pedaço de fio de cobre com comprimento igual a ¼ do comprimento de onda [24], calculado conforme fórmula abaixo: 4 )( λ =cmL → f c =λ onde: λ = comprimento de onda de uma onda sonora ou onda eletromagnética; c = velocidade da luz no vácuo ≈ 300,000 km/s; f = freqüência da onda 1/s = Hz. Logo: )( )/( 8 )( 92,4334 103 MHz sm mL × × = ∴ )()( 28,17 cmcmL = 4.2 MICROCONTROLADOR O microcontrolador utilizado foi o AVR AT90S8515(28) da Atmel, sendo que suas principais características são mostradas na Tabela 4.6 [25]. 27 FONTE: http://www.rfm.com (RF Monolithics, Inc. The RX Series SMT Hybrid ASH Receivers) 28 Não recomendado mais pelo fabricante (Atmel Corporation), substituído pelo ATmega8515.
- 41. 23 TABELA 4.6 – PRINCIPAIS CARACTERÍSTICAS DO MICROCONTROLADOR AT90S8515(29) Principais Características Descrição Arquitetura RISC • Clock mais rápido, melhor desempenho, melhor otimização de compilação (número reduzido de instruções) • Utiliza arquitetura Harvard (memória e barramentos separados para dados e programa) Alto Desempenho e Baixo Consumo • 118 poderosas instruções, sendo as operações realizadas em sua maioria, em um ciclo de clock (busca de operandos, execução de instruções e armazenamento de resultados) • 32 registradores de trabalho de propósitos gerais, conectados diretamente com a ALU • Alcança aproximadamente 1MIPS por MHz Dados e Memória Permanente do Programa • Memória de programa Flash reprogramável de 8 Kbytes (Resistência: 1.000 Ciclos) • Memória EEPROM de 512 bytes (Resistência: 100.000 Ciclos) • Memória interna SRAM de 512 bytes Características Periféricas • Temporizadores/Contadores flexíveis, com modos de comparação • UART serial programável • Watchdog Timer programável com oscilador interno • Interface serial SPI • Comparador Analógico Outras Características • Interrupções internas e externas • Dois modos de Power-Saving selecionados por software • 32 linhas de I/O de propósitos gerais • Duplo PWM Além dessas características apresentadas, outro fator importante que levou à escolha desse microcontrolador, foi a facilidade na construção de um circuito eletrônico para realizar a programação da memória e a possibilidade de escrever o código do programa, compilá-lo e fazer a simulação do seu funcionamento, economizando assim tempo na procura de erros de lógica de programação e tempo de gravação. O fabricante fornece as ferramentas de desenvolvimento. Abaixo são listados os softwares utilizados no desenvolvimento do projeto: • AVR Studio 4: Ambiente de Desenvolvimento Integrado (IDE) Profissional para a escrita e eliminação de erros (criação e simulação). • AVR In-System Programmer: é o software utilizado para a atualização do programa desenvolvido para o microcontrolador. Com intuito de garantir um melhor entendimento com relação à comunicação de dados adotada no trabalho, abaixo é dada uma breve explicação sobre a comunicação UART. 29 FONTE: http://www.atmel.com (Atmel Corporation. “8 Bit AVR Microcontroller with 8K Bytes In-System Programmable Flash AT90S8515”).
- 42. 24 4.2.1 Receptor e Transmissor Assíncrono Universal (UART) No microcontrolador AT90S8515, dados seriais podem ser recebidos e transmitidos por meio de um UART full-duplex, com diferentes registradores para transmissão e recepção. As suas principais características são: • grande variedade de taxas de transmissão (bps); • alta taxa de transmissão a baixas frequências do XTAL; • 8 ou 9 bits de dados; • filtragem de ruídos; • detecção de Overrun; • detecção de Erro de Framing; • detecção de Falso Bit de Início; • três interrupções distintas para TX Completo, Registrados TX de Dados Vazio e RX Completo. 4.2.1.1 Transmissão de Dados A transmissão de dados é iniciada escrevendo o dado a ser transmitido no registrador de E/S de dados da UART (UDR). O dado é transferido do UDR para o registrador de deslocamento quando: • um novo caractere seja escrito no UDR depois que o bit de parada do caractere anterior tenha sido enviado. Nesse caso, o registrador de deslocamento é carregado imediatamente; • um novo caractere seja escrito no UDR antes que o bit de parada do caractere anterior tenha sido enviado. Então, o registrador de deslocamento é carregado quando o bit de parada do caractere que está sendo transmitido tenha sido enviado.
- 43. 25 4.2.1.2 Recepção de Dados Quando o receptor da UART detecta um bit de início válido, é iniciada a amostragem dos bits de dados recebidos. O valor lógico encontrado em pelo menos duas das três amostras, é tomado como o valor do bit. Todos os bits são então transferidos para o registrador de deslocamento, da forma como eles são amostrados. Quando um bit de parada entra no receptor da UART, a maioria dos três bits amostrados deve ser de nível lógico igual a “1”, para que o bit de parada seja aceito. Se duas ou mais amostras forem de nível lógico igual a “0”, um erro de framing (dado recebido em tamanho diferente do esperado) é setado no registrador de status da UART (USR). Outros erros, como por exemplo, quando um byte é recebido antes que o dado anterior tenha sido lido, o USR é setado com um erro de overrun. 4.2.1.3 Gerador de Taxa de Transmissão O gerador de taxa de transmissão é um divisor de freqüência que gera a taxa de transmissão, conforme a seguinte equação: ( )116 +⋅ = UBRR f BAUD CK onde: BAUD = Taxa de Transmissão; fCK = Freqüência do Cristal utilizado no projeto (no caso foi 4MHz); UBRR = Conteúdo do registrador da taxa de transmissão da UART. Logo: ( )110316 4 )( +⋅ = MHz BAUD bps ∴ )()( 2400 bpsbpsBAUD ≈ A velocidade adotada para a comunicação com os módulos de comunicação RF foi de 2.400bps. Dessa forma, analisando a tabela de correspondência de dados entre os valores de UBRR em relação às diversas freqüências de cristal disponíveis no mercado e a taxa de erro,
- 44. 26 para que se tenha uma taxa de transmissão na ordem de 2.400bps e utilizando um cristal de 4MHz, o valor de UBRR é de 103 e a taxa de erro é de aproximadamente 0,2%. 4.3 MÓDULO DE POTÊNCIA O CI L298N é o responsável pelo módulo de potência no circuito do robô. Esse componente nada mais é do que uma ponte H em um circuito integrado. As maiores vantagens de se utilizar um componente como esse, está na redução do espaço ocupado no circuito e na simplicidade da montagem. A Figura 4.7 apresenta o diagrama em blocos do CI L298N [26]. FIGURA 4.7 – DIAGRAMA EM BLOCOS DO CI L298N(30) O L298 integra dois estágios de potência de saída (A e B). O estágio de potência de saída, dependendo do estado da entrada, pode movimentar uma carga indutiva, como por exemplo, relés, solenóides, motores de passo e motores de corrente contínua. Na Tabela 4.7 são mostradas as funções dos principais pinos de conexão do L298. 30 FONTE: http://www.st.com (STMicroelectronics)
- 45. 27 TABELA 4.7 – FUNÇÕES DOS PRINCIPAIS PINOS DO L298(31) Nome Função Sense A; Sense B Entre esse pino e o Terra é conectado um resistor sensitivo para controlar a corrente da carga. Out 1; Out 2 Saídas da Ponte A. A corrente que flui através da carga conectada entre esses dois pinos, é monitorada pelo pino 1. Input 1; Input 2 Entradas da Ponte A (compatíveis com nível TTL). Enable A; Enable B Entradas (compatíveis com nível TTL); nível baixo desabilita a Ponte A (enable A) e/ou a Ponte B (enable B). Input 3; Input 4 Entradas da Ponte B (compatíveis com nível TTL). Out 3; Out 4 Saídas da Ponte B. A corrente que flui através da carga conectada entre esses dois pinos, é monitorada pelo pino 15. 4.4 MOTORES DE CORRENTE CONTÍNUA 4.4.1 Procedimento Para Escolha dos Motores Com o objetivo de confirmar se as características técnicas do motor a ser utilizado, atenderiam os requisitos mínimos do projeto, uma verificação conforme procedimento(32) listado abaixo, foi realizado: 1. estimar o peso do robô; 2. estimar ou determinar empiricamente os coeficientes de fricção; 3. escolher a velocidade máxima desejada, tamanho da roda e aceleração; 4. a partir da velocidade máxima e do tamanho da roda definido, determinar a velocidade angular do motor; 5. a partir do peso estimado e da aceleração requerida, determinar o torque mínimo do motor; 6. verificar se o motor escolhido apresenta especificação de torque e velocidade que excedam os valores calculados. 31 FONTE: http://www.st.com (STMicroelectronics) 32 FONTE: http://academics.vmi.edu/ee/robocup.htm (Virginia Military Institute)
- 46. 28 4.4.1.1 Velocidade Linear A velocidade linear é determinada pelo tamanho da roda, pela velocidade angular do motor para um determinado torque, e por alguma engrenagem que possa existir entre o motor e a roda. Iniciando com o tamanho da roda, a distância (d) percorrida pelo robô para cada rotação da roda, é dada pela equação: rd ..2 π= onde r é o raio da roda. A velocidade linear média (v) da translação é simplesmente essa distância dividida pelo tempo percorrido: frfdv ...2. π== onde f é a velocidade angular. Fazendo a velocidade angular como uma função da velocidade linear, a equação fica: r v f ..2 π = . Multiplicando por 60 segundos, a velocidade angular é expressa em unidade de Rotações Por Minuto (RPM): r v r v f RPM . .30 ..2 .60 )( ππ == Sabendo-se que o diâmetro da roda utilizada no robô é de 6,5cm e que é desejado que a velocidade linear do robô seja de pelo menos 0,5m/s, temos que a velocidade angular f em RPM será de: )( )/()( )( . .30 m sms RPM r v f π = )( )/()( )( 0325,01416,3 5,0.30 m sms RPMf × = )()( 14791,146 RPMRPMf ≈=
- 47. 29 4.4.1.2 Torque Para determinar quanto torque será necessário, é preciso saber quais forças estão envolvidas para movimentar o robô. Considerando que o robô projetado estará percorrendo ambientes planos, apenas duas forças devem ser consideradas, aquela devido à inércia quando em aceleração e aquela devido à força de fricção. A força de fricção é difícil de ser calculada, pois depende dos tipos de materiais a que o robô terá contato. Geralmente os coeficientes de fricção entre o pneu e o concreto/asfalto, variam entre 0,001 e 0,03(33) . A força inercial é produto da massa pela aceleração. Sabendo-se que o peso do robô projetado é de aproximadamente 400g, a conexão entre o motor e a roda é direta, ou seja, sem nenhum tipo de engrenagem, a aceleração desejada seja de 0,5m/s2 e que o robô possui duas rodas/motores, o torque pode ser calculado, multiplicando-se a soma da força inercial e a força de fricção pelo raio da roda, conforme é ilustrado na Figura 4.8. FIGURA 4.8 – FORÇA x RAIO = TORQUE(34) Com base nos valores descritos anteriormente, sabendo-se que g = 9,80m/s2 (aceleração da gravidade) e considerando que o coeficiente de fricção é no pior caso de 0,03, o valor do torque mínimo requerido para movimentar o robô é calculado, conforme apresentado logo abaixo: )/()()/()()( 22 03,0 smkgsmkgN gmamF ××+×= )/()()/()()( 22 8,940,003,05,040,0 smkgsmkgNF ××+×= 33 FONTE: http://en.wikipedia.org/wiki/Rolling_resistance 34 FONTE: http://lancet.mit.edu/motors/index.html (Designing with D.C. Motors) r F = m x a + Fricção T = F x r
- 48. 30 )()( 3176,0 NNF = )()().( mNmN rFT ×= )()().( 0325,03176,0 mNmNT ×= ).().( 10 mmNmmNT ≅ Como são dois motores no robô, o valor de torque requerido deve ser dividido por dois, portanto: ).().( 5 mmNmmNT = 4.4.2 Características Técnicas dos Motores Utilizados Os motores utilizados no projeto são motores de corrente contínua fabricados pela FAULHABER modelo 1516E012S 15/3K. A Tabela 4.8, apresenta as principais características técnicas desse motor, assim como na Figura 4.9 e Figura 4.10, são apresentadas as curvas características do Torque e Potência versus a Velocidade Angular sem e com redução interna respectivamente. TABELA 4.8 – PRINCIPAIS CARACTERÍSTICAS TÉCNICAS DOS MOTORES(35) Características Unidade Valores Especificados (Motor sem Redução) Valores Especificados (Motor com Redução) Tensão Nominal Volt 12 12 Resistência do Terminal 117 117 Potência de Saída W 0,27 0,27 Eficiência % 61 73 Velocidade Sem Carga RPM 16.200 395 Corrente Sem Carga A 0,006 0,006 Torque mN.m 0,5 20,5 Stall Torque mN.m 0,64 26,24 Peso g 10 26 35 FONTE: http://www.faulhaber-group.com (Faulhaber Group)
- 49. 31 Resumindo, esse modelo é controlado por uma tensão contínua de no máximo 12V, com uma redução interna de 41:1, resultando num torque máximo em operação contínua de 20,5mN.m e com uma rotação máxima sem carga de aproximadamente 395RPM. A Tabela 4.9, ilustra a comparação entre os valores especificados pelo fabricante e os valores mínimos requeridos, comprovando-se o atendimento aos requisitos do sistema. TABELA 4.9 – CARACTERÍSTICAS TÉCNICAS DO MOTOR VS. VALORES MÍNIMOS REQUERIDOS Características Unidade Valores Especificados (Motor com Redução) Valores Mínimos Requeridos Potência de Saída W 0,27 0,092 Velocidade Angular RPM 395 147 Torque mN.m 20,5 5,0 0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0 2.700 5.400 8.100 10.800 13.500 16.200 18.900 - 0,05 0,10 0,15 0,20 0,25 0,30 FIGURA 4.9 – CURVA DE TORQUE E POTÊNCIA VS. VELOCIDADE ANGULAR (SEM REDUÇÃO) Velocidade sem Carga “Stall Torque” Torque (mN.m) Velocidade Angular (RPM) Potência vs. Velocidade Angular Torque vs. Velocidade Angular Potência (W)
- 50. 32 0,0 5,0 10,0 15,0 20,0 25,0 30,0 0 100 200 300 400 - 0,05 0,10 0,15 0,20 0,25 0,30 FIGURA 4.10 – CURVA DE TORQUE E POTÊNCIA VS. VELOCIDADE ANGULAR (COM REDUÇÃO) 4.5 SENSORES Podem-se definir sensores, como sendo dispositivos que mudam seu comportamento sob a ação de uma grandeza física, podendo fornecer diretamente ou indiretamente um sinal que indica essa grandeza. A seguir, são apresentadas algumas características que diferenciam os tipos de sensores encontrados e que são importantes na definição de qual tipo de sensor é mais apropriado para um determinado sistema [27]: • sensibilidade: taxa de variação da leitura em relação ao estímulo; • linearidade: medida de constância da sensibilidade; • faixa de medida: diferença entre o mais intenso e o menos intenso estímulo mensurável; • tempo de resposta: tempo necessário para uma mudança de estímulo se refletir na leitura; Velocidade sem Carga “Stall Torque” Torque (mN.m) Velocidade Angular (RPM) Potência vs. Velocidade Angular Torque vs. Velocidade Angular Potência (W)
- 51. 33 • precisão: diferença entre leitura e estímulo; • repetibilidade: diferença entre medidas sucessivas do mesmo estímulo; • resolução: menor variação de estímulo mensurável; • tipo de saída: movimento mecânico, corrente, tensão, pressão, nível de luminosidade, etc. Algumas características físicas também podem ser destacadas [27]: • tamanho e peso: dependendo da aplicação, pode ser um aspecto muito importante; • confiabilidade: tempo médio para falha (MTTF “Mean Time to Failure”), número médio de horas entre falhas que causam impossibilidade de operação do sensor; • interfaceamento: necessidade de conexões não padronizadas, tensões não- padronizadas, etc. • aumento de complexidade e custo. Os principais tipos de sensores são: sensores térmicos (resistivos, termopar), sensores mecânicos (deslocamento, posição, nível, tensão), sensores ópticos e sensores de campos magnéticos. Existe uma infinidade de tipos de sensores e cada um pode ser mais bem aplicado para determinadas aplicações. 4.5.1 Sensores de Ultrasom Os sensores de ultrasom (sonares) possuem propriedades únicas que são muito úteis na robótica móvel. Esse tipo de sensor possui diversas vantagens, sendo relativamente barato, robusto, preciso e capaz de detectar uma ampla variedade de objetos. O importante é que estimativas robustas de distância podem ser extraídas dos dados fornecidos pelo sensor. Essas informações podem ser utilizadas para evitar obstáculos, o que geralmente são difíceis de se obter por outros métodos.
- 52. 34 4.5.1.1 Princípio de Funcionamento O sensor emite um pulso acústico (onda sonora) e aguarda o retorno de um eco por um determinado período de tempo. Assim que o eco é detectado, é possível medir a distância entre um ponto observado, simplesmente multiplicando a velocidade do som pela metade do tempo medido (metade do tempo de vôo da onda sonora). 4.5.1.2 Considerações Importantes Apesar das vantagens citadas, existem alguns problemas que precisam ser levados em consideração para a medição das distâncias [28]: • velocidade de propagação: a velocidade de propagação das ondas sonoras é fortemente influenciada por variações de temperatura e de uma forma mais suave pela umidade atmosférica. • incerteza na detecção: a energia refletida por um alvo depende do tipo de material do qual é composta a superfície desse material, o qual vai influenciar a intensidade do sinal refletido. • interação com as superfícies: o eco recebido contém apenas uma fração da energia contida no sinal enviado. A energia restante é perdida em efeitos de absorção, difração ou refração. É freqüente, nesses tipos de sistemas, o sensor não receber qualquer sinal refletido, mesmo existindo um objeto na frente dele. Esse fenômeno deve-se ao fato de muitas superfícies se comportarem como espelhos para as ondas ultra-sonoras. Assim, se o ângulo de emissão, em relação à superfície do alvo, exceder um determinado valor crítico, a energia refletida será desviada para fora da zona de detecção do receptor. O que pode ocorrer, é que esses sinais sendo multiplamente refletidos, regressem ao receptor produzindo uma medida errada que é igual à soma das distâncias percorridas pelas ondas.
- 53. 35 4.5.1.3 Descrição do Módulo de Sonar Adotado O sensor de ultrasom, conforme ilustrado na Figura 4.11, possui quatro pinos, sendo dois da alimentação, Vcc (5V) e Terra, um pino de saída que fornece um pulso em nível alto cuja duração é o tempo para o som ir até o obstáculo e voltar e um pino de entrada que quando em nível baixo repete a medição. FIGURA 4.11 – MÓDULO DE ULTRASOM ADOTADO (SONAR)(36) De acordo com as especificações do fabricante(36) , o módulo sonar tem um consumo médio de 2mA, alcance mínimo de 20cm e máximo de 1,5m. No final deste Capítulo, serão mostrados testes realizados que mostram que por meio do sistema projetado, foi possível detectar objetos a uma distância mínima de até 4cm. 4.5.2 Sensores de Velocidade/ Posição Os sensores de velocidade e/ou de posição, são normalmente utilizados para a determinação do deslocamento do robô, na qual são acoplados nas rodas e possuem a capacidade de medir a rotação das rodas. Segue abaixo alguns tipos de sensores de deslocamento e velocidade em uso atualmente e uma breve explicação sobre o funcionamento de cada um deles [28] [29]. • Encoder óptico incremental: um disco com janela a intervalos regulares é iluminado por uma fonte de luz, sendo que do outro lado do disco, fica um elemento fotosensível. Ao girar, alterna-se as áreas com janela e sem janela, gerando no elemento fotosensível uma seqüência de pulsos. A contagem dos pulsos, permite a avaliação do deslocamento angular. 36 FONTE: http://www.tato.ind.br/ (Tato Eletrônicos)
- 54. 36 • Encoder óptico absoluto: fornece um valor numérico específico (valor codificado) para cada posição angular. O disco codificado é firmemente montado ao eixo. Esse disco é dividido em segmentos separados que são alternadamente transparentes ou opacos. A fonte de luz emite um feixe de luz orientado paralelamente que ilumina todos os segmentos do disco codificado. Foto-unidades recebem a luz modulada e convertem-na em sinais que serão posteriormente digitalizados e fornecidos como uma saída. • Encoder indutivo: sensor bastante utilizado para medida de pequenas distâncias, sendo baseado em correntes que são induzidas numa superfície condutora quando as linhas de fluxo magnético interceptam essa superfície. As correntes produzidas na superfície do material condutor é uma função da distância da bobina ativa e a superfície. Essas correntes aumentam quando a distância diminui. • Encoder capacitivo: semelhante ao indutivo, a diferença entre eles reside no fato de que no sensor capacitivo o princípio de funcionamento está baseado na variação do dielétrico no meio em que o sensor está inserido. Quando nesta região penetrar algum objeto, este provoca a variação do dielétrico e, conseqüentemente a variação da freqüência do oscilador, variação esta que é detectada e transformada em um nível de tensão. • Potenciométrico: este tipo de sensor é bastante utilizado em impressoras jato de tinta para controle do posicionamento do carro que contém os cartuchos de tinta. O mais popular tipo de encoder para robôs móveis é o encoder óptico (incremental ou absoluto). 4.5.2.1 Descrição do Sensor de Velocidade Adotado O sensor adotado é o KMI 18/2, que é um sensor integrado, utilizado para a medição de velocidade rotacional [30]. Conforme ilustrado na Figura 4.12, o sensor possui apenas três pinos, sendo dois da alimentação, Vcc (5V) e Terra, e um pino de saída.
- 55. 37 FIGURA 4.12 – SENSOR DE VELOCIDADE ADOTADO(37) 4.5.2.2 Princípio de Funcionamento O sensor detecta a velocidade de rotação das rodas de acordo com os marcos magnéticos referenciados na roda. A freqüência do sinal de saída é proporcional à velocidade rotacional da roda. O princípio funcional é mostrado na Figura 4.13. FIGURA 4.13 – PRINCÍPIO DE FUNCIONAMENTO DO SENSOR DE VELOCIDADE ADOTADO(37) 37 FONTE: http://www.nxp.com/ (Philips Semiconductors)
- 56. 38 4.5.3 Alguns Testes Realizados com os Sensores 4.5.3.1 Teste de Funcionamento do Sensor de Ultrasom (Parte 1) O objetivo principal desse teste foi o de confirmar o funcionamento do sensor de ultrasom (Sonar), para tornar possível a detecção de obstáculos e conseqüentemente o mapeamento do ambiente envolvido. Diversas medições foram realizadas através de um osciloscópio e os resultados obtidos são apresentados na Tabela 4.10, assim como a Figura 4.14, apresenta os dados obtidos pelo osciloscópio. TABELA 4.10 – RESULTADOS OBTIDOS NO TESTE DO SONAR (PARTE 1) Distância Medida (cm) Tempo Medido(38) (ms) Distância Calculada (cm) Diferença (cm) Porcentagem de Erro 2,5 0,30 5,1 2,6 51% 5,0 0,50 8,5 3,5 41% 10,0 0,80 13,6 3,6 26% 15,0 1,10 18,7 3,7 20% 20,0 1,45 24,7 4,7 19% 30,0 2,10 35,7 5,7 16% 45,0 3,10 52,7 7,7 15% As distâncias calculadas, conforme apresentado na Tabela 4.10, foram obtidos a partir da seguinte fórmula: ( )( ) 2 . /)( )( scms cm ct d = onde: d(cm) = distância calculada em centímetros; t(s) = tempo em segundos em que o som emitido retornou ao sonar; c(cm/s) = velocidade do som no ar em centímetros por segundo = 340m/s. Por exemplo, para a distância medida de 45 cm, o valor calculado é: ( )( ) 2 1034.101,3 / 3 )( 3 )( scms cmd +− ×× = ∴ )()( 7,52 cmcmd ≈ 38 Tempos medidos conforme valores obtidos na Figura 4.14
- 57. 39 FIGURA 4.14 – CURVAS MEDIDAS PELO OSCILOSCÓPIO (TESTE DO SONAR) (PARTE 1) A Figura 4.15 apresenta o circuito elétrico correspondente ao teste realizado. FIGURA 4.15 – DIAGRAMA ELÉTRICO DO CIRCUITO DE TESTE DO SONAR (PARTE 1) Nesse teste, não foi necessário nenhum tipo de desenvolvimento lógico, em nível de programação. O módulo não apresentou um resultado com uma precisão conforme o esperado, entretanto, o resultado obtido foi satisfatório e o nível de precisão é suficiente para atender os objetivos gerais do projeto. 4.5.3.2 Teste de Funcionamento do Sensor de Ultrasom (Parte 2) O objetivo principal desse teste foi o de confirmar o funcionamento da lógica de programação desenvolvida para realizar o cálculo da distância entre um obstáculo qualquer e o sensor de ultrasom. A Figura 4.16 apresenta o circuito elétrico correspondente ao teste realizado. 0,3ms 0,5ms 0,8ms 1,1ms 1,45ms 2,1ms
- 58. 40 A Figura 4.17 apresenta o fluxograma correspondente à lógica de programação utilizada no microcontrolador. Através do fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.5. FIGURA 4.16 – DIAGRAMA ELÉTRICO DO TESTE DO SONAR (PARTE 2) FIGURA 4.17 – FLUXOGRAMA DA LÓGICA DE PROGRAMAÇÃO UTILIZADA
- 59. 41 A lógica de programação adotada inicialmente para realizar a medição do tempo em alta do pulso do sensor de ultrasom, baseava-se em conceitos de Interrupção por Variação de Sinal de Entrada (“Timer Input Capture Interrupt”), entretanto, estava-se encontrando bastante dificuldade para obter êxito na medição correta da largura do pulso utilizando esse conceito. Dessa forma, outra técnica foi utilizada para realizar a medição do sinal, que pode ser observada conforme o fluxograma apresentado na Figura 4.17. Sumarizando, o conceito do funcionamento do sistema é o seguinte: 1. o sensor de ultrasom emite uma onda sonora; 2. essa onda sonora é refletida pelo obstáculo; 3. o tempo que essa onda leva para retornar ao sensor é medida (registrador de 16 bits – TCNT1H e TCNT1L). 4. o valor do registrador de 16 bits é enviado para o computador pessoal através da comunicação serial. Primeiro o byte mais significativo, depois o menos significativo, e por último, o byte CCh (204 em decimal) apenas para delimitar uma separação entre o próximo valor lido pelo sensor que é submetido ao computador pessoal. 5. Os valores mostrados na Interface Homem-Máquina, estão em decimal. A Figura 4.18 apresenta um exemplo de resultado obtido e mostrado ao usuário. Pode ser observado que quatro leituras foram feitas pelo sensor e enviadas ao computador pessoal. As quatro leituras foram idênticas, o que mostra uma consistência nos valores medidos pelo microcontrolador com base na leitura dos dados recebidos pelo sensor. 6. Com base nos valores mostrados na Interface Homem-Máquina, é possível calcular o “tempo de vôo” da onda sonora. O esquema abaixo exemplifica o cálculo executado, com base nos valores apresentados na Figura 4.18: • Byte alto – 16 decimal = 10 hexadecimal; • Byte baixo – 89 decimal = 59 hexadecimal; • Timer = 1059 hexadecimal = 4185 decimal; • Cálculo do “tempo de vôo”: ( ) ( ) rescaler Clock TimerTvoo Hz decimalms P 1 )( ××= Onde: Tvoo(ms) = tempo de vôo em milisegundos;
- 60. 42 Timer(decimal) = valor em decimal do Registrador de 16 bits; Clock(Hz) = relógio do sistema (4MHz); Prescaler = 1:1 (ou seja, acompanha o clock do sistema); Portanto: ( ) 1 104 1 4185 6)( × × ×= Hz msTvoo ( )msmsTvoo 05,1)( = 7. Sabendo-se o valor do “tempo de vôo”, é possível calcular a distância em que o obstáculo encontra-se do sensor de ultrasom, utilizando-se a seguinte fórmula: ( ) ( ) 2 / )( ssm m Tvooc D × = Onde: D(cm) = Distância calculada em cm; c(m/s) = Velocidade do Som (temperatura ambiente); ( ) ( ) ( )K K smsm Ta c 273 4,331 /)/( ×= Ta(K) = Temperatura Ambiente em Kelvin Logo: ( ) ( )CKKTa °== 2015,293)( ( ) ( ) ( )K K smsmc 273 15,293 4,331 /)/( ×= ( )smsmc /)/( 41,343= Substituindo pelos valores encontrados, temos que: ( ) ( ) 2 05,115,343 / )( mssm mD × = ∴ ( )cmcmD 96,17)( ≅
- 61. 43 FIGURA 4.18 – TELA DO PROGRAMA EM EXECUÇÃO (TESTE DO SONAR) (PARTE 2) A Tabela 4.11 apresenta outros resultados obtidos e comparados com as distâncias medidas. TABELA 4.11 – RESULTADOS OBTIDOS NO TESTE DO SONAR (PARTE 2) Distância Medida (cm) TCNT1H (39) (Decimal) TCNT1L (40) (Decimal) TCNT1 (Hexadecimal) TCNT1 (Decimal) Tempo de Vôo (ms) Distância Calculada (cm) 2,5 4 125 047D 1149 0,29 4,93 5,0 6 105 0669 1641 0,41 7,04 10,0 11 197 0BC5 3013 0,75 12,93 15,0 16 89 1059 4185 1,05 17,96 20,0 20 173 14AD 5293 1,32 22,72 25,0 25 161 19A1 6561 1,64 28,16 30,0 30 133 1E85 7813 1,95 33,54 40,0 39 25 2719 10009 2,50 42,97 50,0 48 241 30F1 12529 3,13 53,78 60,0 57 53 3935 14645 3,66 62,87 70,0 67 117 4375 17269 4,32 74,13 39 TCNT1H – “Timer Counter 1 High” (Byte mais significativo do registrador de 16 bits) 40 TCNT1L – “Timer Counter 1 Low” (Byte mais significativo do registrador de 16 bits) Byte alto em decimal Byte baixo em decimal Byte CCh em decimal separador dos pacotes 1º sinal 2º sinal 3º sinal 4º sinal
- 62. 44 Distância Medida (cm) TCNT1H (39) (Decimal) TCNT1L (40) (Decimal) TCNT1 (Hexadecimal) TCNT1 (Decimal) Tempo de Vôo (ms) Distância Calculada (cm) 80,0 75 245 4BF5 19445 4,86 83,47 130,0 119 89 7759 30553 7,64 131,15 150,0 138 245 8AF5 35573 8,89 152,70 Fazendo uma rápida análise dos resultados apresentados na Tabela 4.11, a distância calculada apresenta sempre um valor maior que a distância real medida, logo pode ser concluído que uma calibração pode ser realizada. Dessa forma, fez-se a seguinte análise: - determinando-se a diferença entre a distância medida e a distância calculada, calculou-se a média desses valores (2,92cm), e por último, subtraiu-se o valor da média de cada um dos valores de distância calculada. Conforme apresentado na Tabela 4.12 e ilustrado graficamente na Figura 4.19. Pode ser observado que a diferença diminui consideralmente, mostrando um sistema muito mais preciso. TABELA 4.12 – CALIBRAGEM DOS RESULTADOS OBTIDOS NO TESTE DO SONAR (PARTE 2) Distância Medida (cm) Distância Calculada (cm) Distância Medida - Calculada (cm) Distância Calculada - Média (2,92cm) Distância Medida - Calculada “Calibrada” (cm) 2,5 4,93 2,43 2,01 -0,49 5,0 7,04 2,04 4,13 -0,87 10,0 12,93 2,93 10,01 0,01 15,0 17,96 2,96 15,05 0,05 20,0 22,72 2,72 19,80 -0,20 25,0 28,16 3,16 25,24 0,24 30,0 33,54 3,54 30,62 0,62 40,0 42,97 2,97 40,05 0,05 50,0 53,78 3,78 50,86 0,86 60,0 62,87 2,87 59,95 -0,05 70,0 74,13 4,13 71,21 1,21 80,0 83,47 3,47 80,55 0,55 130,0 131,15 1,15 128,23 -1,77 150,0 152,70 2,70 149,78 -0,22
- 63. 45 -2 -1 0 1 2 3 4 5 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 (cm) Distância Medida vs. Calculada Distância Medida vs. Calculada “Calibrada” 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 (cm) Distância Calculada (cm) Distância Medida Distância Calculada "Calibrada" 0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160 Distância Medida (cm) DistânciaCalculada "Calibrada"(cm) FIGURA 4.19 – DISTÂNCIA MEDIDA VS. DISTÂNCIA CALCULADA E CALIBRADA (GRÁFICOS) Com base nesses novos valores obtidos, e sabendo-se que 2,92cm equivale a um “tempo de vôo” da onda sonora do sensor de ultrasom de aproximadamente 0,17ms, conclui- se que o sistema pode ser calibrado desconsiderando esse tempo adicional de 0,17ms do “tempo total de vôo” calculado para cada amostragem, tornando assim, os resultados apresentados pelo sistema mais precisos. 4.5.3.3 Teste de Funcionamento do Sensor de Velocidade Esse teste teve como objetivo, testar o funcionamento dos sensores de velocidade. Para que seja possível mapear o caminho percorrido pelo robô, é necessário que o sistema seja capaz de mensurar a quantidade de vezes que cada roda rotacionou e para isso utilizou-se sensores de velocidade com a capacidade de detectar a presença de metais imantados. A Figura 4.20 apresenta o circuito elétrico que corresponde ao teste realizado.
- 64. 46 FIGURA 4.20 – DIAGRAMA ELÉTRICO DO CIRCUITO DE ODOMETRIA A Figura 4.21 apresenta o fluxograma correspondente à lógica de programação utilizada no microcontrolador. Através do fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.11. FIGURA 4.21 – FLUXOGRAMA DA LÓGICA DE PROGRAMAÇÃO UTILIZADA
- 65. 47 A lógica de programação utilizada para a interface com o usuário, será melhor detalhada no Capítulo 7.3.3 (Comunicação Serial – Parte 3). A Figura 4.22 ilustra a tela do programa em execução. FIGURA 4.22 – TELA DO PROGRAMA DESENVOLVIDO EM EXECUÇÃO É possível observar na Figura 4.22 a seqüência de números recebidos, que representam a quantidade de vezes (46) que o sensor detectou a presença de um metal imantado. Os sensores apresentaram um funcionamento satisfatório e conforme o esperado, com base nos resultados obtidos, verificou-se que será possível adicionar ao robô um sistema de odometria e dessa forma, o ambiente percorrido pelo robô poderá ser mapeado.
- 66. 48 5 ODOMETRIA Uma das principais tarefas a serem desenvolvidas em um sistema de navegação de um robô móvel é a determinação da localização do robô, ou seja, a sua posição e orientação no ambiente analisado. Conforme ilustrado na Figura 5.1, o modelo utilizado é conhecido como plataforma robótica com acionamento diferencial, ou seja, caracterizada pelo uso de duas rodas colocadas nas laterais do robô que são acionadas individualmente por dois motores independentes. Para se determinar a localização desse tipo de plataforma, é necessário obter a posição do seu ponto central (x, y) e o ângulo θ de orientação do robô em relação a um referencial fixo no espaço analisado. Sabendo-se que: • L = comprimento do eixo; • re, rd = raios das rodas esquerda e direita, respectivamente; • ωe, ωd = velocidades angulares das rodas esquerda e direita, respectivamente; • υe, υd = velocidades lineares das rodas esquerda e direita, respectivamente; • υ = velocidade linear do robô; • ω = velocidade angular do robô. FIGURA 5.1 – ILUSTRAÇÃO DA PLATAFORMA ROBÓTICA UTILIZADA y xx y L θ 2.re 2.rd υe υd υ ω ωd ωe
- 67. 49 O método de odometria consiste na determinação da posição e orientação do robô através da integração dos deslocamentos incrementais de suas rodas, medidos a partir de um referencial fixo. O deslocamento do robô é medido por meio de sensores acoplados nas rodas com a capacidade de medir a rotação das rodas. Um tipo de sensor bastante utilizado nesse tipo de aplicação, conforme já explicado no capítulo anterior, é o encoder ótico, que funciona com base na transmissão e recepção de luz através de um disco perfurado, que gira acoplado ao eixo que movimenta a roda do robô. O sensor utilizado no projeto (detalhado no Capítulo 4), é um sensor integrado de velocidade rotacional, dotado da capacidade de detectar referências magnéticas, basicamente, a freqüência da tensão do sinal de saída é proporcional a velocidade rotacional da roda [30]. Para a plataforma robótica apresentada na figura 5.1, as medidas de odometria são feitas a partir de dois sensores de velocidade acoplados a cada um dos motores, os quais permitem medir as rotações da roda correspondente. A partir dos dados coletados dos sensores, conhecendo-se alguns parâmetros cinemáticos do robô e sabendo-se a localização inicial do robô, é possível deduzir as equações [31] que irão determinar a sua posição e orientação em um dado instante. Considerando o movimento executado pelo robô semelhante a um arco de circunferência, conforme apresentado na Figura 5.2, e sabendo-se que r é o raio de giro do robô, teremos que a velocidade linear de cada roda e do robô, assim como a sua velocidade angular, serão: +⋅= 2 L rd ωυ → velocidade linear da roda direita. −⋅= 2 L re ωυ → velocidade linear da roda esquerda. 2 ed r υυ ωυ + =⋅= → velocidade linear do robô. Lr ed υυυ ω − == → velocidade angular do robô. Como pode ser observado na Figura 5.2, considerando-se que o movimento executado pelo robô ocorreu em um intervalo de tempo infinitesimal dt, é possível decompor o deslocamento linear do robô, dl nas suas componentes horizontal (dx) e vertical (dy).
- 68. 50 Discretizando as equações dessas componentes do deslocamento linear, do deslocamento angular dθ e das velocidades lineares de cada roda do robô, através do método de integração de Euler, obtém-se: θυθ coscos ⋅⋅=⋅= dtdldx → ( ) ( ) ( )tttxttx θυ cos⋅∆⋅+=∆+ θυθ sendtsendldy ⋅⋅=⋅= → ( ) ( ) ( )tsenttytty θυ ⋅∆⋅+=∆+ dtd ⋅= ωθ → ( ) ( ) tttt ∆⋅+=∆+ ωθθ dt dld d =υ ; dt dle e =υ → t ld ∆ ∆ ; t le ∆ ∆ FIGURA 5.2 – ILUSTRAÇÃO DO MOVIMENTO INFINITESIMAL DO ROBÔ Considerando Nd e Ne o número de vezes que os sensores de velocidade do lado direiro e esquerdo respectivamente, detectaram um marco magnético e Nres a quantidade total de marcos magnéticos localizados em cada uma das rodas, é possível obter o deslocamento de cada roda do robô, como sendo: y xdx dy L θ θ + dθ dθ r dle dl dld
- 69. 51 d res d d r N N l ⋅⋅⋅=∆ π2 → deslocamento da roda do lado direito. e res e e r N N l ⋅⋅⋅=∆ π2 → deslocamento da roda do lado esquerdo. Substituindo essas duas últimas equações às equações da velocidade linear de cada roda, obtém-se: t r N N d res d d ∆ ⋅⋅ ⋅= π υ 2 → velocidade linear da roda direita. t r N N e res e e ∆ ⋅⋅ ⋅= π υ 2 → velocidade linear da roda esquerda. Com base nessas duas últimas equações, e substituindo-as às equações anteriormente apresentadas de deslocamento linear e angular, é possível obter a localização do robô em relação a um referencial inicialmente conhecido, através das seguintes equações: ( ) ( ) ( ) ( )t N rNrNtxttx res eedd θ π cos⋅⋅⋅+⋅+=∆+ ( ) ( ) ( ) ( )tsen N rNrNtytty res eedd θ π ⋅⋅⋅+⋅+=∆+ ( ) ( ) ( )eedd res rNrN NL ttt ⋅−⋅⋅ ⋅ ⋅ +=∆+ π θθ 2 5.1 FONTES DE ERRO NA ODOMETRIA Apesar de bastante utilizado, a odometria não é um método exato para determinar a localização de um robô móvel em um determinado espaço de tempo, este método apresenta erros que podem ser classificados de duas formas [32]: • Erros sistemáticos: originados de características do robô e/ou sensores, por exemplo: - Diâmetro das rodas diferentes; - Desalinhamento das rodas;
- 70. 52 - Incerteza sobre o ponto de contato da roda; - Resolução finita dos sensores de velocidade; - Comprimento do eixo diferente do comprimento nominal. • Erros não sistemáticos: originados de características da relação do robô com o ambiente, por exemplo: - Movimento sobre solos não uniformes (rugosos); - Movimento sobre obstáculos inesperados no solo; - Escorregamento das rodas (solo escorregadio, aceleração acentuada, rotações rápidas). Os erros sistemáticos, são causados por incertezas nos parâmetros do modelo cinemático do robô (por exemplo, comprimento do eixo e diâmetro das rodas), dessa forma, são graves, pois são uma fonte constante de erros aditivos para o sistema. Os erros não sistemáticos são imprevisíveis, pois independem das características físicas do robô, mas sim do ambiente em que ele se encontra (por exemplo, imperfeições no solo e obstáculos inesperados), ao contrário dos erros sistemáticos, esse tipo de erro não ocorre durante toda a navegação do robô. Através de alguns procedimentos de calibração [33], é possível reduzir os erros de odometria, entretanto, nenhum deles foram aplicados nesse trabalho. 5.2 CÁLCULOS E TESTES Como explicado anteriormente, para iniciar os cálculos para a definição da posição do robô, é necessário o conhecimento dos seguintes parâmetros: • Posição inicial do robô: x(0), y(0) e θ(0); • Número de pulsos lidos em cada sensor de velocidade: Nd e Ne; • Comprimento do eixo do robô: L; • Raios de cada roda: rd e re; • Resolução dos sensores, que é o número de pulsos lidos em uma revolução das rodas: Nres.
- 71. 53 Apenas como exemplo, considera-se que: • x(0) = y(0) = 0; θ(0) = 0; • L = 10cm; • rd = re = 3,2cm; • Nres = 2. Sabendo-se que a quantidade de pulsos por revolução das rodas é igual a 2, que o raio de cada roda é de 3,2cm, pode-se concluir que a precisão do sistema é cerca de 10,05cm, que é o menor deslocamento mensurável pelos sensores de velocidade. O objetivo para este teste não é ter precisão, mas apenas um meio hipotético para mensurar o caminho percorrido pelo robô, considerando-se uma resolução relativamente baixa. Com base nos valores apresentados, e utilizando-se das equações de odometria, conforme apresentado anteriormente, é possível estimar a posição atual do robô, variando-se apenas o número de pulsos lidos em cada sensor de velocidade (Nd e Ne). A Tabela 5.1, procura ilustrar o que foi explicado acima. TABELA 5.1 – CÁLCULO DA POSIÇÃO E DIREÇÃO DO ROBÔ Parâmetro Unidade 1 2 3 4 5 6 7 8 9 Nd [pulsos] 5,0 1,0 3,0 1,0 5,0 1,0 3,0 1,0 5,0 Ne [pulsos] 5,0 0,6 3,0 0,6 5,0 0,6 3,0 0,6 5,0 Vd [%] 100 100 100 100 100 100 100 100 100 Ve [%] 100 61 100 61 100 61 100 61 100 Vd [decimal] 0 0 0 0 0 0 0 0 0 Ve [decimal] 0 100 0 100 0 100 0 100 0 θ [rad] 0 1,57 1,57 3,14 3,14 4,71 4,71 6,28 6,28 θ [º] 0 90 90 180 180 270 270 360 360 x [cm] 50,27 55,04 55,04 49,53 -0,74 -5,51 -5,51 0,00 50,27 y [cm] 0,00 5,51 35,67 40,44 40,44 34,93 4,77 0,00 0,00 Os parâmetros Vd e Ve apresentados na Tabela 5.1, estão relacionados com os parâmetros do PWM (“Pulse Width Modulation”) para o controle de velocidade dos motores, onde 0 (100%), significa velocidade máxima de rotação e 255 (0%), significa que o motor está parado. No exemplo em questão, quando Vd está em 100%, e Ve está 61% da velocidade total, significa que o robô está fazendo uma curva para à esquerda, que teoricamente, quando o sensor de velocidade do motor do lado direito detectar o primeiro marco magnético (pulso),
- 72. 54 o robô deve estar a aproximadamente 90º em relação a posição inicial. Maiores detalhes sobre o PWM, será abordado no Capítulo 6.3.1. O gráfico apresentado na Figura 5.3 (destacado em vermelho), ilustra o caminho teoricamente percorrido pelo robô com base nos valores apresentados na Tabela 5.1. 0 5 10 15 20 25 30 35 40 45 -10 -5 0 5 10 15 20 25 30 35 40 45 50 55 60 y (cm) x (cm) FIGURA 5.3 – ILUSTRAÇÃO DO CAMINHO TEÓRICO PERCORRIDO PELO ROBÔ
- 73. 55 6 PROGRAMAÇÃO E SOFTWARE DE CONTROLE O software de controle do robô, utilizado através da Interface Homem-Máquina (IHM) do projeto, foi desenvolvido em Delphi® [34]. Logo abaixo é apresentada uma breve descrição de cada um dos principais módulos criados durante o desenvolvimento deste software. • Comunicação serial: para acessar a porta serial do microcomputador, foram utilizadas as funções da API do Windows. Na listagem do programa apresentada no Anexo 10.1.12, podem ser observados os comandos e conceitos adotados para executar essa comunicação. • Parâmetros de ajustes do robô: são ajustes necessários que podem variar de acordo com as características físicas do robô e das condições do meio ambiente. • Controle dos motores: ferramenta de controle independente para cada um dos motores. Conceito básico do controle utilizado. • Leitura do sonar: descrição dos dados recebidos do robô com base na leitura do sensor de ultrasom. • Interface gráfica: cálculos utilizados para representação gráfica do caminho percorrido pelo robô, sendo: o caminho aleatório: caminho desejado que seja percorrido pelo robô; o caminhos pré-definidos: testes realizados com base em alguns caminhos pré-definidos; o caminho aproximado: caminho possível de ser percorrido pelo robô, limitado às características físicas do robô; o entrada manual: teste da interface gráfica. • Cálculo dos dados recebidos e enviados: descrição detalhada dos cálculos executados para o compilamento dos dados enviados e recebidos do robô. A Figura 6.1 apresenta a tela do software desenvolvido utilizado para realizar o controle remoto do robô. Nesta figura, além dos principais módulos descritos acima, é possível observar também, que o programa informa o tempo decorrido entre o comando enviado e a equivalente resposta do robô (rodapé).
- 74. 56 FIGURA 6.1 – IMAGEM DO SOFTWARE DE CONTROLE DESENVOLVIDO A seguir serão abordados em maiores detalhes os principais módulos de controle utilizados neste software. 6.1 COMUNICAÇÃO SERIAL A comunicação serial entre o microcomputador e o módulo de interface homem- máquina, foi realizada utilizando-se as funções da API do Windows. Durante o desenvolvimento do trabalho, notou-se alguns erros no recebimento dos dados enviados do circuito de IHM para o microcomputador. Esses erros acontecem com maior freqüência quando a porta serial do windows está em uso pelo sistema e neste instante o circuito de IHM é desligado e ligado novamente sem que a porta serial do windows seja fechada. O correto seria antes de desligar o circuito de IHM, fechar a porta serial (software) e somente após o circuito de IHM estiver ligado é que a porta serial deve ser aberta novamente. Na Tabela 6.1, são apresentadas 50 leituras seqüenciais feitas pela porta serial, de acordo com o dado enviado pelo circuito de IHM. Nd Ne Ângulo Calculado Distância Calculada Distância Obstáculo Distância Percorrida no Eixo X Distância Percorrida no Eixo Y Condição do dado recebido pela serial
- 75. 57 TABELA 6.1 – DADOS CORRIGIDOS – RECEBIDOS PELA PORTA SERIAL 1 2 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 1 0 0 1 0 2 5 3 190 4 0 0 1 0 2 5 3 190 4 0 CORRETO 2 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -872415232 1 0 2 5 3 11 4 0 ERRO LEITURA 3 13369345 13369345 13369345 13369344 13369346 13369349 13369347 13369356 13369348 13369344 13369344 1 0 2 5 3 12 4 0 ERRO ZERO 4 0 0 1 0 2 5 3 211 4 0 0 1 0 2 5 3 211 4 0 CORRETO 5 0 0 1 0 2 5 3 207 4 0 0 1 0 2 5 3 207 4 0 CORRETO 6 0 0 1 0 2 5 3 103 4 0 0 1 0 2 5 3 103 4 0 CORRETO 7 -20122624 -20122624 -20122623 -20122624 -20122622 -20122619 -20122621 -20122601 -20122620 -20122624 -20122624 1 0 2 5 3 23 4 0 ERRO LEITURA 8 65536 65536 65537 65536 65538 65541 65539 65763 65540 65536 65536 1 0 2 5 3 227 4 0 ERRO LEITURA 9 0 204 1 0 2 5 3 97 4 0 0 1 0 2 5 3 97 4 0 CORRETO 10 0 0 1 0 2 5 3 80 4 0 0 1 0 2 5 3 80 4 0 CORRETO 11 33488896 33488896 33488897 33488896 33488898 33488901 33488899 33489063 33488900 33488896 33488896 1 0 2 5 3 167 4 0 ERRO LEITURA 12 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -872351744 1 0 2 5 3 158 4 0 ERRO LEITURA 13 0 254 1 0 2 5 3 164 4 0 0 1 0 2 5 3 164 4 0 CORRETO 14 0 0 1 0 2 5 3 126 4 0 0 1 0 2 5 3 126 4 0 CORRETO 15 65024 65024 65025 65024 65026 65029 65027 65232 65028 65024 65024 1 0 2 5 3 208 4 0 ERRO LEITURA 16 0 254 1 0 2 5 3 204 4 0 0 1 0 2 5 3 204 4 0 CORRETO 17 0 0 1 0 2 5 3 71 4 0 0 1 0 2 5 3 71 4 0 CORRETO 18 0 0 1 0 2 5 3 24 4 0 0 1 0 2 5 3 24 4 0 CORRETO 19 16678912 16678912 16678913 16678912 16678914 16678917 16678915 16679115 16678916 16678912 16678912 1 0 2 5 3 203 4 0 ERRO LEITURA 20 16777216 16777420 16777217 16777216 16777218 16777221 16777219 16777341 16777220 16777216 16777216 1 0 2 5 3 125 4 0 ERRO LEITURA 21 -2,1E+08 -2,1E+08 -2,1E+08 -2,1E+08 -2,1E+08 -2,1E+08 -2,1E+08 -2,1E+08 -2,1E+08 -2,1E+08 -210239488 1 0 2 5 3 145 4 0 ERRO ZERO 22 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -872415232 1 0 2 5 3 72 4 0 ERRO LEITURA 23 13369344 13369344 13369345 13369344 13369346 13369349 13369347 13369399 13369348 13369344 13369344 1 0 2 5 3 55 4 0 ERRO LEITURA 24 -25165569 -25165569 -25165823 -25165824 -25165822 -25165819 -25165821 -25165631 -25165820 -25165824 -25165824 1 0 2 5 3 193 4 0 ERRO -254 25 126976 126976 126977 126976 126978 126981 126979 127000 126980 126976 126976 1 0 2 5 3 24 4 0 ERRO LEITURA 26 16646144 16646144 16646145 16646144 16646146 16646149 16646147 16646180 16646148 16646144 16646144 1 0 2 5 3 36 4 0 ERRO LEITURA 27 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -872415232 1 0 2 5 3 8 4 0 ERRO LEITURA 28 16515073 16515073 16515073 16515072 16515074 16515077 16515075 16515283 16515076 16515072 16515072 1 0 2 5 3 211 4 0 ERRO ZERO 29 -16777216 -16777216 -16777215 -16777216 -16777214 -16777211 -16777213 -16777031 -16777212 -16777216 -16777216 1 0 2 5 3 185 4 0 ERRO LEITURA 30 -2,15E+09 -2,15E+09 -2,15E+09 -2,15E+09 -2,15E+09 -2,15E+09 -2,15E+09 -2,15E+09 -2,15E+09 -2,15E+09 -2147418368 1 0 2 5 3 141 4 0 ERRO LEITURA 31 -16776960 -16776960 -16776959 -16776960 -16776958 -16776955 -16776957 -16776899 -16776956 -16776960 -16776960 1 0 2 5 3 61 4 0 ERRO LEITURA 32 16711681 16711681 16711681 16711680 16711682 16711685 16711683 16711833 16711684 16711680 16711680 1 0 2 5 3 153 4 0 ERRO ZERO 33 0 0 1 0 2 5 3 50 4 0 0 1 0 2 5 3 50 4 0 CORRETO 34 16252929 16252929 16252929 16252928 16252930 16252933 16252931 16253027 16252932 16252928 16252928 1 0 2 5 3 99 4 0 ERRO ZERO 35 -1,34E+08 -1,34E+08 -1,34E+08 -1,34E+08 -1,34E+08 -1,34E+08 -1,34E+08 -1,34E+08 -1,34E+08 -1,34E+08 -134217472 1 0 2 5 3 220 4 0 ERRO LEITURA 36 0 0 1 0 2 5 3 175 4 0 0 1 0 2 5 3 175 4 0 CORRETO 37 -2,01E+08 -2,01E+08 -2,01E+08 -2,01E+08 -2,01E+08 -2,01E+08 -2,01E+08 -2,01E+08 -2,01E+08 -2,01E+08 -201326336 1 0 2 5 3 99 4 0 ERRO LEITURA 38 -33554432 -33554432 -33554431 -33554432 -33554430 -33554427 -33554429 -33554215 -33554428 -33554432 -33554432 1 0 2 5 3 217 4 0 ERRO LEITURA 39 0 96 1 0 2 5 3 233 4 0 0 1 0 2 5 3 233 4 0 CORRETO 40 0 0 1 0 2 5 3 184 4 0 0 1 0 2 5 3 184 4 0 CORRETO 41 16662272 16662272 16662273 16662272 16662274 16662277 16662275 16662335 16662276 16662272 16662272 1 0 2 5 3 63 4 0 ERRO LEITURA 42 0 0 1 0 2 5 3 96 4 0 0 1 0 2 5 3 96 4 0 CORRETO 43 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -872415232 1 0 2 5 3 82 4 0 ERRO LEITURA 44 0 254 1 0 2 5 3 117 4 0 0 1 0 2 5 3 117 4 0 CORRETO 45 52224 52224 52225 52224 52226 52229 52227 52318 52228 52224 52224 1 0 2 5 3 94 4 0 ERRO LEITURA 46 16646399 16646399 16646145 16646144 16646146 16646149 16646147 16646239 16646148 16646144 16646144 1 0 2 5 3 95 4 0 ERRO -254 47 -25037824 -25037824 -25037823 -25037824 -25037822 -25037819 -25037821 -25037620 -25037820 -25037824 -25037824 1 0 2 5 3 204 4 0 ERRO LEITURA 48 -16777216 -16777216 -16777215 -16777216 -16777214 -16777211 -16777213 -16777106 -16777212 -16777216 -16777216 1 0 2 5 3 110 4 0 ERRO LEITURA 49 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -8,72E+08 -872351744 1 0 2 5 3 127 4 0 ERRO LEITURA 50 1,64E+09 1,64E+09 1,64E+09 1,64E+09 1,64E+09 1,64E+09 1,64E+09 1,64E+09 1,64E+09 1,64E+09 1644295168 1 0 2 5 3 158 4 0 ERRO LEITURA NOMENCLATURA UTILIZADA # REFERÊNCIAS (ERROS) INFORMAÇÕES RECEBIDAS QUE CONTÉM O DADO ENVIADO PELO ROBÔ DADO CORRIGIDOREFERÊNCIA UTILIZADA Quando existe algum erro na comunicação serial, os dois últimos valores recebidos antes do envio dos dados pelo circuito de IHM ao microcomputador, são utilizados como referência para identificar o tipo de erro encontrado e assim corrigí-lo. Abaixo é feita uma breve explicação sobre os três tipos de erros que foram identificados ao longo do desenvolvimento do trabalho. • ERRO LEITURA: esse é o erro mais comum que acontece. Os valores recebidos são somados a um número de referência aleatório do sistema, para corrigir esse erro e obter a informação correta enviada pelo circuito de IHM, basta subtrair os dados recebidos por essa referência. • ERRO ZERO: para corrigir esse erro, é necessário subtrair 1 do valor de referência e esse resultado ser subtraído dos dados recebidos. A nomenclatura utilizada como “ERRO ZERO” é devido ao fato de que se subtrairmos o valor
- 76. 58 da referência pelo primeiro dado enviado pelo circuito de IHM, a diferença encontrada será igual a zero. • ERRO -254: esse é um tipo de erro mais difícil de acontecer, para corrigí-lo, é necessário subtrair 255 do valor de referência e esse resultado ser subtraído dos dados recebidos. Nesse caso, a nomenclatura utilizada como “ERRO -254” é devido ao fato de que se subtrairmos o valor da referência pelo primeiro dado enviado pelo circuito de IHM, a diferença encontrada será de -254. Para poder identificar os dados recebidos no meio dos erros apresentados pela comunicação serial, quando este ocorrer, foi incorporado no protocolo de comunicação entre o circuito de IHM e o microcomputador uma seqüência numérica de 1 a 4, a Figura 6.2 procura ilustrar o que está sendo explicado. 1 1 0 0 1 1 0 0 0 0 0 0 0 0 0 1 X X X X X X X X 0 0 0 0 0 0 1 0 X X X X X X X X 0 0 0 0 0 0 1 1 X X X X X X X X 0 0 0 0 0 1 0 0 Byte de confirmação de início da transmissão 1º Byte (CCh) Seqüência (número 1) 2º Byte (01h) 3º Byte Seqüência (número 2) 4º Byte (02h) Dado 5º Byte Seqüência (número 3) 6º Byte (03h) Dado 7º Byte Seqüência (número 4) 8º Byte (04h) Dado X X X X X X X X Dado 9º Byte FIGURA 6.2 – SEQÜÊNCIA DE DADOS RECEBIDOS PELO PC Sabendo-se que a seqüência de dados será conforme apresentado na Figura 6.2, é possível identificar o momento exato em que o dado está sendo recebido pela porta serial e se este dado possui ou não um dos erros apresentados anteriormente. Maiores detalhes com relação ao protocolo de comunicação utilizado entre o circuito de IHM e o microcomputador, será abordado no Capítulo 7. Na Figura 6.3 é apresentado o fluxograma que procura ilustrar o conceito aplicado na programação para identificar essa seqüência de dados e corrigí-la quando for necessário.
- 77. 59 INÍCIO DO BLOCO DE LEITURA DA PORTA SERIAL E AJUSTE DO ERRO (VR[i-1] := 4) e (VR[i-3] := 3) e (VR[i-5] := 2) e (VR[i-7] := 1) e (VR[i-8] := 204) ? LER DADOS DA PORTA SERIAL i := i + 1 VR[i] := DADO RECEBIDO VR[i-5] + VR[i-3] + VR[i-1] + VR[i-8] -VR[i-7]*4 = 210 ? VR[i-5] + VR[i-3] + VR[i-1] + VR[i-8] -VR[i-7]*4 = 209 ? i := i - 9 j := 0 (VR[i] = 0) ou (VR[i] = 204)? (VR[i] <> 0) e (VR[i+2] - VR[i] = 204) ? VR[i+2] - VR[i] = 0? CONDICAO := ‘CORRETO’ CONDICAO := ‘ERRO LEITURA’ CONDICAO := ‘ERRO ZERO’ CONDICAO := ‘ERRO -254’ FIM DO BLOCO DE LEITURA DA PORTA SERIAL E AJUSTE DO ERRO REFERENCIA = VR[i] VR[i] := VR[i] - REFERENCIA i := i + 1 j := j + 1 CONDICAO = ‘ERRO LEITURA’? VR[i] := VR[i] - REFERENCIA + 1 i := i + 1 CONDICAO = ‘ERRO ZERO’? VR[i] := VR[i] - REFERENCIA + 255 i := i + 1 j = 10? S S S NNN N N N SSS i := i + 1 CONDICAO = ‘CORRETO’? N N N SSS SN FIGURA 6.3 – FLUXOGRAMA DA LEITURA DA PORTA SERIAL E AJUSTE DO ERRO 6.2 PARÂMETROS DE AJUSTE DO ROBÔ Na Figura 6.4, são mostrados os parâmetros que podem ser ajustados para a execução correta dos cálculos e medições com relação aos movimentos executados pelo robô.
- 78. 60 FIGURA 6.4 – PARÂMETROS DE AJUSTE DO ROBÔ Segue abaixo uma breve descrição de cada um desses parâmetros: • Nres: resolução dos sensores, que é o número de pulsos lidos em uma revolução das rodas; • rd e re: são os raios de cada roda; • L: é o comprimento do eixo do robô; • Clock: é a freqüência de oscilação do microcontrolador; • Prescaler: parâmetro de ajuste, caso o cálculo de tempo registrado no microcontrolador não esteja acompanhando o clock do sistema, ou seja, 1:1; • Vel. Som (c): velocidade do som calculada com base na temperatura do ambiente de trabalho (Temp. Amb); • Calibração do robô: ajuste necessário de acordo com o nível de tensão da fonte de alimentação do robô; • Ajuste inicial de velocidade: é possível definir qual a velocidade inicial de rotação para cada um dos motores do robô; • informações mais detalhadas sobre os últimos dois parâmetros, serão abordados no decorrer deste capítulo. Para que a movimentação do robô possa ser mapeada e de uma certa forma, bem controlada, em termos de direção e distância percorrida em relação a um referencial fixo, o conceito utilizado foi o seguinte: • primeiro define-se o ângulo entre o ponto de partida e o ponto de chegada (desejado), considerando a localização e a direção inicial previamente
- 79. 61 conhecidas, utilizando-se dessas informações, o movimento executado pelo robô deve ser circular, de acordo com os valores previamente calculados, com base nos parâmetros de ajustes do robô; • por último a distância entre os pontos é calculada e assim como no caso anterior, o movimento executado pelo robô, neste caso em linha reta, estará de acordo com os valores previamente calculados, com base nos parâmetros de ajustes do robô. Nas Tabelas 6.2 e 6.3 são ilustrados alguns valores de ângulos calculados com base nos parâmetros de ajustes do robô, que são utilizados como referência para a definição do comando a ser enviado para o robô. TABELA 6.2 – ÂNGULO CALCULADO VS. PARÂMETROS DE AJUSTES DO ROBÔ Exemplo #1 Exemplo #2 Exemplo #3 # θ Nd Ne # θ Nd Ne # θ Nd Ne # θ Nd Ne 1 -178 -1 25 26 14 1 -1 1 -178 -1 12 1 -175 -1 16 2 -171 -1 24 27 21 2 -1 2 -165 -1 11 2 -165 -1 15 3 -165 -1 23 28 27 3 -1 3 -151 -1 10 3 -154 -1 14 4 -158 -1 22 29 34 4 -1 4 -137 -1 9 4 -144 -1 13 5 -151 -1 21 30 41 5 -1 5 -123 -1 8 5 -134 -1 12 6 -144 -1 20 31 48 6 -1 6 -110 -1 7 6 -123 -1 11 7 -137 -1 19 32 55 7 -1 7 -96 -1 6 7 -113 -1 10 8 -130 -1 18 33 62 8 -1 8 -82 -1 5 8 -103 -1 9 9 -123 -1 17 34 69 9 -1 9 -69 -1 4 9 -93 -1 8 10 -117 -1 16 35 75 10 -1 10 -55 -1 3 10 -82 -1 7 11 -110 -1 15 36 82 11 -1 11 -41 -1 2 11 -72 -1 6 12 -103 -1 14 37 89 12 -1 12 -27 -1 1 12 -62 -1 5 13 -96 -1 13 38 96 13 -1 13 27 1 -1 13 -51 -1 4 14 -89 -1 12 39 103 14 -1 14 41 2 -1 14 -41 -1 3 15 -82 -1 11 40 110 15 -1 15 55 3 -1 15 -31 -1 2 16 -75 -1 10 41 117 16 -1 16 69 4 -1 16 -21 -1 1 17 -69 -1 9 42 123 17 -1 17 82 5 -1 17 34 1 -1 18 -62 -1 8 43 130 18 -1 18 96 6 -1 18 51 2 -1 19 -55 -1 7 44 137 19 -1 19 110 7 -1 19 69 3 -1 20 -48 -1 6 45 144 20 -1 20 123 8 -1 20 86 4 -1 21 -41 -1 5 46 151 21 -1 21 137 9 -1 21 103 5 -1 22 -34 -1 4 47 158 22 -1 22 151 10 -1 22 120 6 -1 23 -27 -1 3 48 165 23 -1 23 165 11 -1 23 137 7 -1 24 -21 -1 2 49 171 24 -1 24 178 12 -1 24 154 8 -1 25 -14 -1 1 50 178 25 -1 25 171 9 -1
- 80. 62 TABELA 6.3 – ÂNGULO CALCULADO VS. QUANTIDADE DE PULSOS LIDOS 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 0 0 7 14 21 27 34 41 48 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 -1 7 14 21 27 34 41 48 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 -2 14 21 27 34 41 48 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 -3 21 27 34 41 48 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 -4 27 34 41 48 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 -5 34 41 48 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 -6 41 48 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 -7 48 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 -8 55 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 -9 62 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 -10 69 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 -11 75 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 -12 82 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 -13 89 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 -14 96 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 -15 103 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 -16 110 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 -17 117 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 -18 123 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 -19 130 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 309 -20 137 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 309 315 -21 144 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 309 315 322 -22 151 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 309 315 322 329 -23 158 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 309 315 322 329 336 -24 165 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 309 315 322 329 336 343 -25 171 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 309 315 322 329 336 343 350 -26 178 185 192 199 206 213 219 226 233 240 247 254 261 267 274 281 288 295 302 309 315 322 329 336 343 350 357 0 -1 -2 -3 -4 -5 -6 -7 -8 -9 -10 -11 -12 -13 -14 -15 -16 -17 -18 -19 -20 -21 -22 -23 -24 -25 -26 0 0 -7 -14 -21 -27 -34 -41 -48 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 1 -7 -14 -21 -27 -34 -41 -48 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 2 -14 -21 -27 -34 -41 -48 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 3 -21 -27 -34 -41 -48 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 4 -27 -34 -41 -48 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 5 -34 -41 -48 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 6 -41 -48 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 7 -48 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 8 -55 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 9 -62 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 10 -69 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 11 -75 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 12 -82 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 13 -89 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 14 -96 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 15 -103 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 16 -110 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 17 -117 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 18 -123 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 19 -130 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 -309 20 -137 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 -309 -315 21 -144 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 -309 -315 -322 22 -151 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 -309 -315 -322 -329 23 -158 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 -309 -315 -322 -329 -336 24 -165 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 -309 -315 -322 -329 -336 -343 25 -171 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 -309 -315 -322 -329 -336 -343 -350 26 -178 -185 -192 -199 -206 -213 -219 -226 -233 -240 -247 -254 -261 -267 -274 -281 -288 -295 -302 -309 -315 -322 -329 -336 -343 -350 -357 Ne<0 Nd > 0 Nd < 0 Ne>0 Na Tabela 6.2, são apresentados três exemplos de configurações para os parâmetros de ajustes definidos para o robô, que resultam em seqüências diferenciadas de ângulos possíveis que podem ser atingidos no caminho percorrido pelo robô.
- 81. 63 Os valores de Nd e Ne são a quantidade de pulsos lidos pelos sensores de velocidade, localizados nas rodas direita e esquerda respectivamente. Quando o valor de Nd ou Ne apresentado for um número negativo, significa que o sentido de giro do motor é o anti- horário, quando este número for positivo significa o oposto, ou seja, o sentido de giro do motor é o horário. No exemplo #1 da Tabela 6.2, apenas para ilustrar, para que o robô faça um giro de -178º, é necessário que a roda direita gire no sentido anti-horário até que 1 pulso seja detectado pelo sensor de velocidade e a roda esquerda precisa girar no sentido horário até que 25 pulsos sejam detectados pelo sensor de velocidade. A Tabela 6.3 apresenta, de uma maneira mais abrangente, os ângulos possíveis que podem ser atingidos no caminho percorrido pelo robô, considerando os valores de Nd > 0 com Ne < 0 e Nd < 0 com Ne > 0 respectivamente, considerando a aplicação fiel dos parâmetros do robô, ou seja, sem ajustes de calibração, conforme exemplo #1 da Tabela 6.2. O conceito de se manter praticamente uma roda parada e apenas a outra girando para se realizar a movimentação de direcionamento do robô, foi o que apresentou os melhores resultados e menores probabilidades de erro ao longo dos testes realizados, estes que serão apresentados posteriormente, ainda neste capítulo. Um dos conceitos testados que poderia ser utilizado para esta função seria o de rotacionar os dois motores em sentidos opostos, na mesma velocidade e na mesma quantidade de pulsos, entretanto alguns problemas foram encontrados, conforme listado abaixo: • velocidade de rotação dos motores diferenciada; • dificuldade no ajuste de parada do robô (inércia); • calibração variada em função do nível de tensão da bateria de alimentação do robô, dificultando a acertividade do comando executado com relação ao movimento desejado. Ainda analisando a Tabela 6.2, o primeiro exemplo apresenta os valores de ângulos possíveis considerando a aplicação fiel dos parâmetros do robô, o segundo exemplo, apresenta os resultados caso a resolução dos sensores fosse reduzido pela metade, ou seja 6, nesse caso é possível observar que o passo entre os ângulos é o dobro quanto comparado ao exemplo anterior, e por último, o terceiro exemplo que apresenta um ajuste de calibração do robô, necessário devido ao caminho adicional percorrido pelo robô, mesmo após a execução do comando de desligamento dos motores, isso ocorre devido à inércia do robô. Com relação ao fator de calibração do robô, este parâmetro foi obtido através de testes realizados, conforme alguns exemplos apresentados nas Tabelas 6.4 e 6.5.
- 82. 64 TABELA 6.4 – TESTES DE VERIFICAÇÃO DO COMANDO ENVIADO VS. EXECUTADO PELO ROBÔ Nd Ne Nd Ne Nd Ne Nd Ne Nd Ne Nd Ne Nd Ne Nd Ne Nd Ne Nd Ne Nd Ne Nd Ne 1 -1 1 -3 3 1 -1 1 -2 -2 2 -4 6 2 -2 5 -5 -3 3 -5 7 3 -3 9 -5 2 -1 1 -2 2 1 -1 3 -3 -2 2 -4 5 2 -2 5 -4 -3 3 -7 6 3 -3 7 -6 3 -1 1 -1 2 1 -1 2 -4 -2 2 -4 5 2 -2 7 -4 -3 3 -7 5 3 -3 9 -5 4 -1 1 -2 2 1 -1 3 -2 -2 2 -5 5 2 -2 5 -4 -3 3 -5 9 3 -3 10 -6 5 -1 1 -2 1 1 -1 1 -3 -2 2 -5 5 2 -2 5 -5 -3 3 -6 8 3 -3 9 -5 6 -1 1 -2 2 1 -1 3 -2 -2 2 -4 5 2 -2 5 -5 -3 3 -5 7 3 -3 8 -5 7 -1 1 -2 3 1 -1 2 -4 -2 2 -5 6 2 -2 6 -3 -3 3 -6 7 3 -3 9 -7 8 -1 1 -2 2 1 -1 2 -4 -2 2 -4 4 2 -2 7 -4 -3 3 -5 7 3 -3 10 -5 9 -1 1 -4 1 1 -1 3 -3 -2 2 -5 6 2 -2 5 -7 -3 3 -6 7 3 -3 8 -5 10 -1 1 -2 2 1 -1 3 -2 -2 2 -5 4 2 -2 6 -3 -3 3 -5 7 3 -3 10 -6 11 -1 1 -3 2 1 -1 1 -3 -2 2 -4 5 2 -2 5 -3 -3 3 -5 8 3 -3 7 -5 12 -1 1 -1 2 1 -1 2 -2 -2 2 -4 5 2 -2 6 -4 -3 3 -7 7 3 -3 9 -5 13 -1 1 -2 1 1 -1 3 -3 -2 2 -5 6 2 -2 6 -4 -3 3 -6 10 3 -3 11 -6 14 -1 1 -3 2 1 -1 3 -2 -2 2 -4 4 2 -2 7 -6 -3 3 -6 6 3 -3 8 -4 15 -1 1 -1 2 1 -1 1 -3 -2 2 -5 6 2 -2 6 -5 -3 3 -6 7 3 -3 7 -6 16 -1 1 -3 2 1 -1 4 -2 -2 2 -5 6 2 -2 4 -3 -3 3 -6 7 3 -3 8 -6 17 -1 1 -2 2 1 -1 2 -2 -2 2 -4 5 2 -2 7 -4 -3 3 -6 8 3 -3 10 -4 18 -1 1 -2 2 1 -1 1 -2 -2 2 -4 6 2 -2 6 -5 -3 3 -5 7 3 -3 8 -5 19 -1 1 -2 1 1 -1 3 -2 -2 2 -5 4 2 -2 6 -4 -3 3 -6 9 3 -3 9 -5 20 -1 1 -3 1 1 -1 2 -2 -2 2 -5 5 2 -2 7 -3 -3 3 -6 8 3 -3 7 -5 21 -1 1 -2 1 1 -1 2 -4 -2 2 -4 6 2 -2 5 -4 -3 3 -6 7 3 -3 9 -6 22 -1 1 -2 1 1 -1 3 -3 -2 2 -4 6 2 -2 4 -6 -3 3 -5 7 3 -3 8 -6 23 -1 1 -1 2 1 -1 3 -3 -2 2 -5 7 2 -2 4 -3 -3 3 -6 7 3 -3 9 -4 24 -1 1 -3 1 1 -1 2 -4 -2 2 -4 4 2 -2 6 -4 -3 3 -6 7 3 -3 8 -6 25 -1 1 -2 2 1 -1 3 -2 -2 2 -5 6 2 -2 6 -4 -3 3 -6 9 3 -3 9 -6 Média -2,2 1,8 Média 2,3 -2,7 Média -4,5 5,3 Média 5,6 -4,2 Média -5,8 7,4 Média 8,6 -5,4 Enviado RecebidoEnviado Recebido Enviado RecebidoEnviado RecebidoEnviado Recebido Enviado Recebido -4 -3 -2 -1 0 0 1 2 3 4 0 5 10 15 20 25 Ne Nd -6 -5 -4 -3 -2 3 4 5 6 7 0 5 10 15 20 25 Ne Nd -8 -7 -6 -5 -4 5 6 7 8 9 0 5 10 15 20 25 Ne Nd Foi solicitado ao robô que ele executasse 25 vezes o mesmo comando, e que esta seqüência de repetições acontecesse para 6 comandos diferentes. O objetivo dos testes apresentados na Tabela 6.4 foi o de verificar se o comando executado pelo robô, independentemente de qual fosse, apresentasse um resultado constante. Nos três casos apresentados graficamente, existem pequenas dispersões em torno da média dos resultados obtidos, porém a maior incidência de resultados obtidos está na própria média. Conclui-se portanto, apenas como exemplo, que quando se desejar que o robô realize um giro de 27º, o comando que deve ser enviado para que ele execute algo próximo disso, deve ser o de Nd = -1 e Ne = 1, sendo que o resultado obtido será algo em torno de Nd = -2 e Ne = 2, equivalente a um ângulo de giro de 27º, conforme dados apresentados na Tabela 6.3. Na Tabela 6.5, são apresentados os resultados de alguns testes que tiveram como objetivo confrontar o comando enviado para o robô versus o resultado do comando executado
- 83. 65 pelo robô, versus o caminho real percorrido pelo robô. Para isso, o robô foi inicialmente posicionado sempre em uma mesma direção e comandos iguais foram enviados ao robô até que este completasse um giro de 360º, ou algo próximo disso. TABELA 6.5 – TESTES DO COMANDO ENVIADO VS. EXECUTADO PELO ROBÔ (ÂNGULO DE GIRO) Real Real Real Nd Ne θ Nd Ne θ θ Nd Ne θ Nd Ne θ θ Nd Ne θ Nd Ne θ θ 2 -1 21 4 -2 41 30 3 -1 27 6 -2 55 43 4 -1 34 7 -4 75 61 2 -1 21 4 -2 41 30 3 -1 27 6 -2 55 43 4 -1 34 9 -2 75 61 2 -1 21 4 -3 48 35 3 -1 27 5 -3 55 43 4 -1 34 8 -1 62 51 2 -1 21 4 -1 34 25 3 -1 27 6 -1 48 37 4 -1 34 8 -3 75 61 2 -1 21 4 -2 41 30 3 -1 27 5 -2 48 37 4 -1 34 7 -2 62 51 2 -1 21 4 -2 41 30 3 -1 27 6 -2 54 42 4 -1 34 7 -2 62 51 2 -1 21 3 -2 34 25 3 -1 27 7 -2 62 48 4 -1 34 7 -1 55 45 2 -1 21 3 -2 34 25 3 -1 27 7 -2 62 48 Total 238 Total 466 380 2 -1 21 4 -2 41 30 3 -1 27 6 -1 48 37 Média 34 Média 67 54 2 -1 21 5 -1 41 30 Total 243 Total 487 380 2 -1 21 4 -2 41 30 Média 27 Média 54 42 196% 82% 2 -1 21 5 -1 41 30 Total 252 Total 478 350 200% 78% Média 21 Média 40 29 190% 73% Real Real Real Nd Ne θ Nd Ne θ θ Nd Ne θ Nd Ne θ θ Nd Ne θ Nd Ne θ θ 5 -1 41 10 -1 75 61 6 -1 48 11 -1 82 72 7 -1 55 12 -2 96 78 5 -1 41 9 -2 76 62 6 -1 48 12 -2 96 84 7 -1 55 11 -3 96 78 5 -1 41 9 -2 75 61 6 -1 48 11 -2 89 78 7 -1 55 12 -4 110 90 5 -1 41 10 -3 89 73 6 -1 48 10 -3 89 78 7 -1 55 10 -1 75 61 5 -1 41 9 -2 76 62 6 -1 48 11 -2 89 78 7 -1 55 11 -2 89 73 5 -1 41 9 -2 75 61 Total 240 Total 445 390 Total 275 Total 466 380 Total 246 Total 466 380 Média 48 Média 89 78 Média 55 Média 93 76 Média 41 Média 78 63 185% 88% 169% 82% 189% 82% Teste #4 Teste #5 Teste #6 Teste #3Teste #2Teste #1 Enviado RecebidoEnviado Recebido Enviado Recebido Enviado Recebido Enviado Recebido Enviado Recebido Pegando como exemplo o teste número 4, pode-se observar que o comando enviado pelo computador ao robô, deveria resultar em um ângulo de giro do robô próximo de 246º, porém o resultado recebido do robô apresenta que o ângulo de giro do robô foi de 466º, isso equivale a 189% acima do valor esperado, além do mais é possível observar que apesar do valor recebido apontar um valor de 466º, o ângulo real de giro do robô foi aproximadamente 380º, isso equivale a 82% do valor recebido do robô. É possível obsevar pelos demais testes apresentados nessa tabela, que essas diferenças não diferem muito de um comando para outro, mostrando uma certa precisão se utilizarmos esses parâmetros de ajustes ao enviar os dados para o robô.
- 84. 66 Apesar de diversos outros testes terem sido executados, apenas 6 deles foram apresentados na Tabela 6.5, porém isso não interfere na conclusão final obtida, pois os resultados obtidos foram muito semelhantes. Na Tabela 6.6 são apresentadas as distâncias calculadas em relação à quantidade de pulsos lidos pelo microcontrolador, com base na leitura dos sensores de velocidade. TABELA 6.6 – DISTÂNCIA CALCULADA VS. QUANTIDADE DE PULSOS LIDOS 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 0 0 1 2 3 3 4 5 6 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 1 1 2 3 3 4 5 6 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 2 2 3 3 4 5 6 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 3 3 3 4 5 6 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 4 3 4 5 6 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 5 4 5 6 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 6 5 6 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 7 6 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 8 7 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 9 8 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 10 8 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 11 9 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 12 10 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 13 11 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 14 12 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 15 13 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 16 13 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 17 14 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 18 15 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 19 16 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 38 20 17 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 38 39 21 18 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 38 39 39 22 18 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 38 39 39 40 23 19 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 38 39 39 40 41 24 20 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 38 39 39 40 41 42 25 21 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 38 39 39 40 41 42 43 26 22 23 23 24 25 26 27 28 28 29 30 31 32 33 34 34 35 36 37 38 39 39 40 41 42 43 44 Nd > 0 Ne>0 Para que robô percorra um caminho em linha reta, é necessário que o giro dos motores esquerdo e direito sejam iguais, ou seja, a quantidade de pulsos lidos pelos sensores de ambos os lados deve ser igual (Nd = Ne). Um dos problemas identificados é que ao mandar o robô percorrer um caminho em linha reta, quando os motores são desligados, o motor direito demora mais tempo para parar do que o do lado esquerdo, isso faz com que o robô tenha um ângulo de giro em relação ao ponto de partida. A Tabela 6.7, apresenta alguns testes realizados, com o objetivo de fazer com que o robô percorra um caminho em linha reta. Os testes 1 e 2 mostram as distâncias calculadas versus a distância percorrida e medida pelo robô, versus a distância real percorrida pelo robô. Foram feitas 10 medições para cada comando, a primeira com Nd = Ne = 20 pulsos e a segunda com Nd = Ne = 35 pulsos.
- 85. 67 TABELA 6.7 – TESTES DO COMANDO ENVIADO VS. EXECUTADO PELO ROBÔ (LINHA RETA) Real Real Nd Ne θ Dist. Nd Ne θ Dist. Dist. Nd Ne θ Dist. Nd Ne θ Dist. Dist. 20 20 0 34 45 37 55 69 67 35 35 0 59 60 53 48 95 93 20 20 0 34 41 35 41 64 61 35 35 0 59 56 51 34 90 89 20 20 0 34 46 37 62 70 67 35 35 0 59 59 52 48 93 90 20 20 0 34 41 35 41 64 63 35 35 0 59 56 50 41 89 87 20 20 0 34 42 35 48 65 63 35 35 0 59 61 50 75 93 91 20 20 0 34 40 35 34 63 61 35 35 0 59 61 50 75 93 89 20 20 0 34 42 35 48 65 63 35 35 0 59 61 50 75 93 89 20 20 0 34 44 36 55 67 65 35 35 0 59 59 49 69 90 87 20 20 0 34 42 36 41 65 65 35 35 0 59 59 51 55 92 89 20 20 0 34 40 34 41 62 62 35 35 0 59 54 49 34 86 85 Média 34 Média 47 65 63 Média 59 Média 55 91 89 Diferença 31 97% Diferença 32 97% Real Real Nd Ne θ Dist. Nd Ne θ Dist. Dist. Nd Ne θ Dist. Nd Ne θ Dist. Dist. 10 20 -69 25 29 29 0 49 47 25 35 -69 50 48 46 14 79 77 10 20 -69 25 33 30 21 53 53 25 35 -69 50 49 45 27 79 77 10 20 -69 25 32 30 14 52 50 25 35 -69 50 49 46 21 80 79 10 20 -69 25 30 29 7 49 47 25 35 -69 50 49 46 21 80 79 10 20 -69 25 30 29 7 49 48 25 35 -69 50 47 46 7 78 76 10 20 -69 25 29 28 7 48 47 25 35 -69 50 47 45 14 77 75 10 20 -69 25 33 29 27 52 50 25 35 -69 50 46 45 7 76 75 10 20 -69 25 30 29 7 49 47 25 35 -69 50 46 45 7 76 74 10 20 -69 25 31 29 14 50 50 25 35 -69 50 46 44 14 75 75 10 20 -69 25 28 28 0 47 45 25 35 -69 50 47 45 14 77 76 Média 25 Média 10 50 48 Média 50 Média 15 78 76 Diferença 25 97% Diferença 28 98% Recebido Recebido Teste #1 Teste #2 Teste #3 Teste #4 Enviado Recebido Enviado Enviado Recebido Enviado Analisando os resultados dos testes 1 e 2, é possível observar que independentemente da distância solicitada que o robô percorresse, quando Nd for igual a Ne, a diferença é de aproximadamente 31cm a mais do que o desejado, para valores de Nd e Ne abaixo de 20 pulsos, essa diferença tende a diminuir devido a diminuição da força de inércia. A diferença entre o valor real medido e o valor calculado com base na leitura dos pulsos foi extremamente pequena, de apenas 2cm, essa diferença se mostrou constante em praticamente todos os testes realizados. As principais causas para essa diferença podem ser: • leitura adicional de um pulso pelos sensores de velocidade; • erro devido a resolução de leitura dos pulsos (apenas 12 ímãs); • diferenças entre os valores considerados para os cálculos versus as medidas reais, como por exemplo, raio das rodas.
- 86. 68 As Figuras 6.5, 6.6, 6.7 e 6.8 mostram a imagem dos caminhos percorridos pelo robô, os 10 pontos de chegada, e a direção final do robô dos testes 1, 2, 3 e 4 respectivamente. FIGURA 6.5 – TESTE #1 RELACIONADO AOS DADOS DA TABELA 6.7 (ESCALA 1:4,8) FIGURA 6.6 – TESTE #2 RELACIONADO AOS DADOS DA TABELA 6.7 (ESCALA 1:6,6)
- 87. 69 FIGURA 6.7 – TESTE #3 RELACIONADO AOS DADOS DA TABELA 6.7 (ESCALA 1:3,8) FIGURA 6.8 – TESTE #4 RELACIONADO AOS DADOS DA TABELA 6.7 (ESCALA 1:5,7) Nas Figuras 6.5 e 6.6, o importante é observar que o problema não se encontra na distância percorrida, mas sim na direção final do robô.
- 88. 70 Para minimizar esse erro, foram feitos alguns testes adicionais como os testes 3 e 4 apresentados na Tabela 6.7. A idéia foi a de reduzir a quantidade de giros que o motor direito deve executar em relação a quantidade de giros do motor esquerdo, e também, considerar uma velocidade inicial para o motor direito de 90% do total, ou seja, 10% mais lento que a velocidade do motor esquerdo. Essa alternativa resultou em uma média de ângulo de giro bem menor quando comparada com a dos testes 1 e 2, conforme pode ser observado nas Figuras 6.7 e 6.8. 6.3 CONTROLE DOS MOTORES 6.3.1 Controle da Velocidade Antes de explicar o conceito aplicado para melhorar a performance do robô com relação ao caminho percorrido em linha reta, cabe aqui uma breve explicação do conceito utilizado com relação à forma de controle de velocidade dos motores. A velocidade de um motor de corrente contínua, pode ser controlada por meio do ajuste da sua tensão de armadura. Em vez de um sinal contínuo ser utilizado para realizar esse controle, pode ser utilizado um sinal PWM (Pulse Width Modulation) onde a largura dos pulsos controla a potência fornecida ao motor e por sua vez a velocidade de rotação. A modulação PWM, consiste basicamente em aplicar uma onda quadrada de amplitude Vcc e freqüência alta (entre 10KHz e 20KHz)(41) no lugar da tensão contínua (Vcc). A tensão média varia em função do tempo que a onda fica em nível alto (Vcc) e do tempo que a onda fica em nível baixo (0V). A relação entre o tempo que a onda fica em nível alto e o período total é conhecido como “Duty Cycle” (Ciclo de Trabalho). O Duty Cycle é normalmente expresso em porcentagem, ou seja, para uma modulação PWM com Duty Cycle igual a 50%, metade do tempo a tensão fica em nível alto (Vcc) e metade em nível baixo (0V). Uma modulação PWM de amplitude 12V e Duty Cycle de 50% produz o mesmo efeito de uma tensão contínua de amplitude 6V, isto porque a tensão média nos dois casos é 6V. A Figura 6.9, explica graficamente o que foi comentado. 41 FONTE: http://en.wikipedia.org/wiki/Pulse-width_modulation
- 89. 71 Contador Valor de Referência Saída do PWM FIGURA 6.9 – VARIAÇÃO DO SINAL PWM Neste projeto o PWM é gerado pelo próprio microcontrolador, onde um contador é incrementado de acordo com o clock adotado para o sistema (4MHz) e é resetado no final de cada período do PWM. Quando o valor do contador é maior que o valor da referência, a saída do PWM muda o estado de alto para baixo [25]. A resolução do PWM adotada é de 8 bits, o que significa um valor máximo de 255 em decimal (FFh) e a freqüência de operação é de: KHz MHzf Freqüência TCK 843,7 510 4 510 === A Figura 6.10 apresenta um exemplo de ciclo de trabalho, considerando um valor de referência igual 50% do total (127,5 em decimal). Ciclo de Trabalho = 50% Velocidade = 50% 127,5 (referência) fTCK/510 FIGURA 6.10 – EXEMPLO DE VARIAÇÃO DO SINAL PWM (50% DE CICLO DE TRABALHO) 6.3.2 Controle da Quantidade de Rotações Como explicado anteriormente, os valores de Nd e Ne são a quantidade de pulsos lidos pelos sensores de velocidade, localizados nas rodas direita e esquerda respectivamente. Com base nos valores de Nd e Ne, o microcontrolador consegue definir o momento exato em que o motor deve ser desligado. O sinal recebido dos sensores de velocidade incrementam dois
- 90. 72 contadores no microcontrolador que ele utiliza como referência para comparar com os valores recebidos de Nd e Ne. A Figura 6.11, procura ilustrar o diagrama de estados baseado na lógica de programação utilizada para identificar a mudança de estado nas portas do microcontrolador, por onde o sinal dos sensores de velocidade será recebido. PB6L e PB7L PB6L e PB7H Incrementa Variável 1 Incrementa Variável 2 PB6H e PB7H PB7 PB6H e PB7L Incrementa Variável 2 Incrementa Variável 1 PB6 PB6 PB7 PB6 PB7 PB6 PB7 Legenda: PB6L = Pino 6 da porta B do microcontrolador está em nível baixo; PB6H = Pino 6 da porta B do microcontrolador está em nível alto; PB6 = Mudança de estado do pino 6 da porta B de nível alto para nível baixo; PB6 = Mudança de estado do pino 6 da porta B de nível baixo para nível alto; PB7L = Pino 7 da porta B do microcontrolador está em nível baixo; PB7H = Pino 7 da porta B do microcontrolador está em nível alto; PB7 = Mudança de estado do pino 7 da porta B de nível alto para nível baixo; PB7 = Mudança de estado do pino 7 da porta B de nível baixo para nível alto. FIGURA 6.11 – DIAGRAMA DE ESTADOS (SINAL DOS SENSORES DE VELOCIDADE) 6.3.3 Compensação da Velocidade Para melhorar a performance do robô, com relação ao caminho percorrido em linha reta, foi incorporado na lógica de programação do microcontrolador um sistema de compensação de velocidade.
- 91. 73 A Figura 6.12 apresenta o fluxograma dessa programação, onde é possível entender o conceito utilizado. FIGURA 6.12 – FLUXOGRAMA DA LÓGICA DE COMPENSAÇÃO DE VELOCIDADE Um conceito interessante que também poderia ser aplicado no controle de velocidade, é através do desenvolvimento de um algoritmo de controle PI (Proporcional Integral) no microcontrolador para garantir uma melhor precisão no controle de velocidade dos motores de corrente contínua, conforme apresentado no artigo [35]. Com o objetivo de ilustrar o conceito explicado no fluxograma acima, foram realizados oito testes, sendo quatro sem utilizar o sistema de compensação de velocidade e quatro utilizando-o. A Tabela 6.8, apresenta os resultados dos quatro testes sem a utilização do sistema de compensação de velocidade e a Figura 6.13, mostra a imagem dos caminhos percorridos pelo robô, relacionados com estes testes. Já a Tabela 6.9 e a Figura 6.14, apresentam os resultados dos quatro testes utilizando o sistema de compensação de velocidade.
- 92. 74 TABELA 6.8 – TESTES DE DESEMPENHO SEM SISTEMA DE COMPENSAÇÃO DE VELOCIDADE Real Real Nd Ne θ Dist. Nd Ne θ Dist. Dist. Nd Ne θ Dist. Nd Ne θ Dist. Dist. 20 20 0 34 53 43 69 80 76 10 20 -69 25 40 34 41 62 61 20 20 0 34 52 42 68 79 75 10 20 -69 25 40 34 41 62 62 20 20 0 34 52 41 76 78 75 10 20 -69 25 39 33 41 60 60 20 20 0 34 52 41 75 78 75 10 20 -69 25 39 33 42 60 59 20 20 0 34 49 40 62 75 71 10 20 -69 25 40 33 48 61 60 Média 34 Média 70 78 74 Média 25 Média 43 61 60 Diferença 44 95% Diferença 36 98% Real Real Nd Ne θ Dist. Nd Ne θ Dist. Dist. Nd Ne θ Dist. Nd Ne θ Dist. Dist. 45 45 0 75 79 66 89 121 115 35 45 -69 67 76 64 82 117 114 45 45 0 75 80 66 96 122 116 35 45 -69 67 75 65 69 117 114 45 45 0 75 80 67 89 123 117 35 45 -69 67 74 64 68 116 111 45 45 0 75 79 66 89 121 114 35 45 -69 67 73 63 69 114 110 45 45 0 75 78 66 83 121 115 35 45 -69 67 75 63 82 116 112 Média 75 Média 89 122 115 Média 67 Média 74 116 112 Diferença 47 95% Diferença 49 97% Teste #3 Teste #4 Enviado Recebido Enviado Recebido Teste #1 Teste #2 Enviado Recebido Enviado Recebido FIGURA 6.13 – TESTE RELACIONADO AOS DADOS DA TABELA 6.8 (ESCALA 1:7,6)
- 93. 75 TABELA 6.9 – TESTES DE DESEMPENHO COM SISTEMA DE COMPENSAÇÃO DE VELOCIDADE Real Real Nd Ne θ Dist. Nd Ne θ Dist. Dist. Nd Ne θ Dist. Nd Ne θ Dist. Dist. 20 20 0 34 41 32 62 61 61 10 20 -69 25 34 32 14 55 54 20 20 0 34 40 34 41 62 61 10 20 -69 25 30 30 0 50 48 20 20 0 34 39 33 41 60 60 10 20 -69 25 29 30 -7 49 49 20 20 0 34 37 33 27 59 57 10 20 -69 25 31 30 7 51 50 20 20 0 34 35 32 21 56 55 10 20 -69 25 29 29 0 49 48 Média 34 Média 38 60 58 Média 25 Média 3 51 50 Diferença 26 98% Diferença 26 98% Real Real Nd Ne θ Dist. Nd Ne θ Dist. Dist. Nd Ne θ Dist. Nd Ne θ Dist. Dist. 45 45 0 75 70 63 48 111 107 35 45 -69 67 67 62 34 108 107 45 45 0 75 69 61 55 109 106 35 45 -69 67 60 54 41 96 94 45 45 0 75 69 62 48 110 107 35 45 -69 67 62 60 14 102 101 45 45 0 75 71 63 55 112 109 35 45 -69 67 61 53 55 96 93 45 45 0 75 71 62 61 111 108 35 45 -69 67 65 60 34 105 103 Média 75 Média 53 111 107 Média 67 Média 36 101 99 Diferença 36 97% Diferença 34 98% Teste #3 Teste #4 Enviado Recebido Enviado Recebido Teste #1 Teste #2 Enviado Recebido Enviado Recebido FIGURA 6.14 – TESTE RELACIONADO AOS DADOS DA TABELA 6.9 (ESCALA 1:7,7)
- 94. 76 Comparando os resultados apresentados nas Tabelas 6.8 e 6.9, e analisando as imagens apresentadas nas Figuras 6.13 e 6.14, é possível concluir uma grande melhora em relação ao caminho percorrido, entretanto ainda existe um pequeno ângulo de giro no final do percurso. Esse erro pode ser compensado descontando essa diferença do próximo comando a ser enviado ao robô. 6.4 INTERFACE GRÁFICA Conforme já comentado anteriormente, a Figura 6.1, apresenta a tela do programa de controle em execução. É possível observar nessa imagem, que existe uma área gráfica onde é possível desenhar o caminho que se deseja que o robô percorra. Após desenhado o caminho que o robô deve percorrer, essa informação gráfica, precisa ser convertida em valores de Nd e Ne, que é a linguagem de comando de movimentação do robô. Para se definir os valores de Nd e Ne, é necessário saber qual a direção do caminho desenhado, em outras palavras, qual o ângulo de giro do robô em relação a posição anterior que ele se encontrava. A definição desse ângulo, depende da direção que o robô se encontrava anteriormente, dependendo dessa posição, o cálculo para a definição do comando correto a ser escolhido pode variar. Ao longo do desenvolvimento do projeto, observou-se que existem 81 possibilidades diferentes que precisam ser consideradas no cálculo para a definição do ângulo de giro do robô. Para facilitar o entendimento, a Figura 6.15 apresenta algumas situações possíveis de movimentação do robô, onde cada cor representa um caminho simulado. Partindo-se do princípio de que o ponto de origem nesse gráfico é realmente o ponto de partida do robô, e que o ângulo inicial considerado é igual a 0º, ou seja, a direção inicial do robô é no sentido do eixo x > 0, na Figura 6.16 é possível observar o resultado dos cálculos que teoricamente devem ser considerados no caminho a ser percorrido pelo robô.
- 95. 77 0 46 48 5038 40 42 4430 32 34 3622 24 26 2814 16 18 206 8 10 12 4 2 2 4 12 10 8 6 20 18 16 14 28 26 24 22 36 34 32 30 50 48 46 44 42 40 38 FIGURA 6.15 – SIMULAÇÃO DE CAMINHOS POSSÍVEIS A SEREM PERCORRIDOS PELO ROBÔ x y Dx Dy α θ x y Dx Dy α θ x y Dx Dy α θ x>0 y>0 14 10 14 10 36 x>0 y>0 10 48 14 10 78 x>0 y>0 14 34 14 10 68 x>0 y>0 20 20 6 10 59 23 x>0 y<0 32 44 22 -4 -10 -89 x=0 y>0 14 40 0 6 90 22 x>0 y>0 30 24 10 4 22 -37 x>0 y<0 41 38 9 -6 -34 -23 x<0 y>0 11 46 -3 6 -63 27 x>0 y<0 38 16 8 -8 -45 -67 x<0 y<0 27 29 -14 -9 33 -114 x>0 y>0 17 46 3 6 63 -27 x<0 y<0 33 4 -5 -12 67 -68 x<0 y<0 25 25 -2 -4 63 31 x<0 y<0 11 34 -3 -6 63 153 x<0 y>0 25 5 -8 1 -7 -75 x<0 y<0 12 20 -13 -5 21 -42 x>0 y<0 17 34 3 -6 -63 -153 x<0 y>0 0 0 -25 -5 11 18 x>0 y>0 32 44 20 24 50 -151 x y Dx Dy α θ x y Dx Dy α θ x>0 y>0 37 11 14 10 17 x>0 y>0 49 20 14 10 22 x>0 y<0 43 8 6 -3 -27 -43 x<0 y>0 41 30 -8 10 -51 106 x>0 y>0 47 13 4 5 51 78 x<0 y>0 34 32 -7 2 -16 35 x<0 y<0 39 11 -8 -2 14 143 x<0 y<0 31 26 -3 -6 63 79 x>0 y<0 47 9 8 -2 -14 152 x<0 y>0 29 28 -2 2 -45 -108 x<0 y>0 41 15 -6 6 -45 149 x>0 y>0 46 34 17 6 19 -116 x>0 y<0 50 12 9 -3 -18 207 x<0 y<0 37 22 -9 -12 53 -146 x>0 y<0 49 20 12 -2 -9 117 FIGURA 6.16 – RESULTADO DOS CÁLCULOS BASEADOS NOS CAMINHOS DA FIGURA 6.15
- 96. 78 Na Figura 6.16, é possível observar o ponto de chegada do robô (x e y), a distância percorrida pelo robô pode ser calculada, com base nos valores de Dx e Dy ( ( ) ( )22 yx DDD += ), o ângulo α, que é o ângulo de giro do robô, considerando o eixo x e y fixo e o ângulo θ, que é o ângulo de giro do robô, considerando no cálculo a direção anterior. Os resultados apresentados na Figura 6.16, demonstram que o cálculo do ângulo θ, pode variar dependendo da direção que o robô se encontrava no instante anterior. Abaixo são listados alguns exemplos de calculos possíveis, dependendo da direção do robô no instante anterior ao do novo comando: Situação 1: Estado anterior: x ≥ 0 e y ≥ 0 Estado novo: x > 0 e y > 0 anterior anteriorxx anterioryy _ _ _ arctan ααθ α −= − − = Situação 2: Estado anterior: x < 0 e y > 0 Estado novo: x > 0 e y > 0 anterior anteriorxx anterioryy _180 _ _ arctan ααθ α −+°−= − − = Situação 3: Estado anterior: x > 0 e y > 0 Estado novo: x < 0 e y > 0 anterior anteriorxx anterioryy _180 _ _ arctan ααθ α −+°= − − = Situação 4: Estado anterior: x > 0 e y > 0 Estado novo: x = 0 e y > 0 anterior_ 90 ααθ α −= °= Situação 5: Estado anterior: x > 0 e y > 0
- 97. 79 Estado novo: x = 0 e y < 0 anterior_ 90 ααθ α −= °−= Situação 6: Estado anterior: x = 0 e y > 0 Estado novo: x < 0 e y > 0 anterior anteriorxx anterioryy _ _ _ arctan ααθ α += − − = A Figura 6.17, apresenta as 81 situações possíveis identificadas, que devem ser consideradas no cálculo para a definição do ângulo de giro do robô. As situações destacadas em cinza, são as situações mais prováveis de acontecer e que foram introduzidas na lógica de programação do software de controle do robô. Estado anterior x>0 y>0 x<0 y>0 x>0 y>0 x<0 y>0 x>0 y>0 x<0 y>0 x=0 y>0 x=0 y>0 x=0 y>0 Estado novo x>0 y>0 x<0 y>0 x<0 y>0 x>0 y>0 x=0 y>0 x=0 y>0 x<0 y>0 x>0 y>0 x=0 y>0 Estado anterior x>0 y>0 x<0 y>0 x>0 y>0 x<0 y>0 x>0 y>0 x<0 y>0 x=0 y>0 x=0 y>0 x=0 y>0 Estado novo x>0 y<0 x<0 y<0 x<0 y<0 x>0 y<0 x=0 y<0 x=0 y<0 x<0 y<0 x>0 y<0 x=0 y<0 Estado anterior x>0 y<0 x<0 y<0 x>0 y<0 x<0 y<0 x>0 y<0 x<0 y<0 x=0 y<0 x=0 y<0 x=0 y<0 Estado novo x>0 y<0 x<0 y<0 x<0 y<0 x>0 y<0 x=0 y<0 x=0 y<0 x<0 y<0 x>0 y<0 x=0 y<0 Estado anterior x>0 y<0 x<0 y<0 x>0 y<0 x<0 y<0 x>0 y<0 x<0 y<0 x=0 y<0 x=0 y<0 x=0 y<0 Estado novo x>0 y>0 x<0 y>0 x<0 y>0 x>0 y>0 x=0 y>0 x=0 y>0 x<0 y>0 x>0 y>0 x=0 y>0 Estado anterior x>0 y>0 x<0 y>0 x>0 y>0 x<0 y>0 x>0 y>0 x<0 y>0 x=0 y>0 x=0 y>0 x=0 y>0 Estado novo x>0 y=0 x<0 y=0 x<0 y=0 x>0 y=0 x=0 y=0 x=0 y=0 x<0 y=0 x>0 y=0 x=0 y=0 Estado anterior x>0 y<0 x<0 y<0 x>0 y<0 x<0 y<0 x>0 y<0 x<0 y<0 x=0 y<0 x=0 y<0 x=0 y<0 Estado novo x>0 y=0 x<0 y=0 x<0 y=0 x>0 y=0 x=0 y=0 x=0 y=0 x<0 y=0 x>0 y=0 x=0 y=0 Estado anterior x>0 y=0 x<0 y=0 x>0 y=0 x<0 y=0 x>0 y=0 x<0 y=0 x=0 y=0 x=0 y=0 x=0 y=0 Estado novo x>0 y>0 x<0 y>0 x<0 y>0 x>0 y>0 x=0 y>0 x=0 y>0 x<0 y>0 x>0 y>0 x=0 y>0 Estado anterior x>0 y=0 x<0 y=0 x>0 y=0 x<0 y=0 x>0 y=0 x<0 y=0 x=0 y=0 x=0 y=0 x=0 y=0 Estado novo x>0 y<0 x<0 y<0 x<0 y<0 x>0 y<0 x=0 y<0 x=0 y<0 x<0 y<0 x>0 y<0 x=0 y<0 Estado anterior x>0 y=0 x<0 y=0 x>0 y=0 x<0 y=0 x>0 y=0 x<0 y=0 x=0 y=0 x=0 y=0 x=0 y=0 Estado novo x>0 y=0 x<0 y=0 x<0 y=0 x>0 y=0 x=0 y=0 x=0 y=0 x<0 y=0 x>0 y=0 x=0 y=0 FIGURA 6.17 – SITUAÇÕES POSSÍVEIS PARA O CÁLCULO DO ÂNGULO DE GIRO DO ROBÔ A seguir serão apresentados os resultados de alguns testes realizados, utilizando-se da interface gráfica do software de controle do robô. Para facilitar o desenvolvimento do trabalho e análise dos resultados dos testes, criou- se no software de controle, 10 caminhos pré-definidos para que o robô percorra.
- 98. 80 A Figura 6.18, apresenta a tela do software de controle, com o resultado do primeiro teste executado e a Figura 6.19, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.18 – TESTE #01 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.19 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #01) (ESCALA 1:7,8) Legenda: Caminho Desejado — Caminho Real — Caminho Aproximado — Dados Recebidos Comandos Enviados Obstáculos detectados Caminho Selecionado Comandos Enviados
- 99. 81 A Figura 6.20, apresenta a tela do software de controle, com o resultado do segundo teste executado e a Figura 6.21, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.20 – TESTE #02 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.21 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #02) (ESCALA 1:10,4)
- 100. 82 A Figura 6.22, apresenta a tela do software de controle, com o resultado do terceiro teste executado e a Figura 6.23, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.22 – TESTE #03 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.23 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #03) (ESCALA 1:8,15)
- 101. 83 A Figura 6.24, apresenta a tela do software de controle, com o resultado do quarto teste executado e a Figura 6.25, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.24 – TESTE #04 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.25 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #04) (ESCALA 1:6,54)
- 102. 84 A Figura 6.26, apresenta a tela do software de controle, com o resultado do quinto teste executado e a Figura 6.27, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.26 – TESTE #05 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.27 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #05) (ESCALA 1:6,82)
- 103. 85 A Figura 6.28, apresenta a tela do software de controle, com o resultado do sexto teste executado e a Figura 6.29, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.28 – TESTE #06 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.29 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #06) (ESCALA 1:8,37)
- 104. 86 A Figura 6.30, apresenta a tela do software de controle, com o resultado do sétimo teste executado e a Figura 6.31, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.30 – TESTE #07 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.31 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #07) (ESCALA 1:13,33)
- 105. 87 A Figura 6.32, apresenta a tela do software de controle, com o resultado do oitavo teste executado e a Figura 6.33, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.32 – TESTE #08 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.33 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #08) (ESCALA 1:9,5)
- 106. 88 A Figura 6.34, apresenta a tela do software de controle, com o resultado do nono teste executado e a Figura 6.35, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.34 – TESTE #09 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.35 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #09) (ESCALA 1:7,32)
- 107. 89 A Figura 6.36, apresenta a tela do software de controle, com o resultado do décimo teste executado e a Figura 6.37, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.36 – TESTE #10 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.37 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #10) (ESCALA 1:7,02)
- 108. 90 A Figura 6.38, apresenta a tela do software de controle, com o resultado do último teste executado e a Figura 6.39, apresenta uma foto do caminho real percorrido pelo robô. FIGURA 6.38 – TESTE #11 UTILIZANDO-SE A INTERFACE GRÁFICA FIGURA 6.39 – CAMINHO REAL PERCORRIDO PELO ROBÔ (TESTE #11) (ESCALA 1:12,76)
- 109. 91 A diferença entre este último teste e os demais testes apresentados anteriormente, está nos obstáculos adicionais incluídos no caminho do robô, com o objetivo de ilustrar o obstáculo detectado comparando os valores de distância calculados com base nos valores recebidos do robô, versus a distância real que o obstáculo se encontrava do robô (valores apresentados em vermelho na Figura 6.39). 6.5 PROGRAMAÇÃO DOS MICROCONTROLADORES Apesar de algumas partes da lógica de programação utilizada nos microcontroladores já terem sido abordadas anteriormente, esta seção tem por objetivo sumarizar a lógica de programação utilizada tanto no circuito de IHM, quanto no circuito de controle do robô. As Figuras 6.40 e 6.41, apresentam os fluxogramas correspondentes à lógica de programação do circuito de IHM e do robô respectivamente. FIGURA 6.40 – FLUXOGRAMA DA LÓGICA DE PROGRAMAÇÃO DO CIRCUITO DE IHM
- 110. 92 FIGURA 6.41 – FLUXOGRAMA DA LÓGICA DE PROGRAMAÇÃO DO CIRCUITO DO ROBÔ Para maiores detalhes, os Anexos 10.1.13 e 10.1.14, apresentam a listagem final dos programas utilizados nos microcontroladores do circuito de IHM e do robô respectivamente.
- 111. 93 7 SISTEMA DE COMUNICAÇÃO O sistema de comunicação desenvolvido e utilizado no projeto pode ser dividido em duas partes: 1. comunicação serial: entre a Interface Homem-Máquina (IHM), computador pessoal, e o circuito de IHM (com os módulos de comunicação por meio de radiofreqüência); 2. comunicação bidirecional por meio de radiofreqüência: é a comunicação utilizada entre o circuito de interface homem-máquina e o robô. Basicamente, pode-se dizer que apenas duas informações trafegam entre o computador pessoal e o robô, são elas: 1. comandos enviados pelo computador pessoal para a movimentação do robô, ou para a leitura do sensor de ultrasom; 2. dados lidos pelos sensores que são enviados pelo robô ao computador pessoal, para o processamento desses dados. 7.1 COMUNICAÇÃO SERIAL Como explicado anteriormente, a comunicação realizada entre o computador pessoal e o circuito de IHM é serial. A taxa de transmissão utilizada é de 2.400 bits por segundo. Nessa comunicação não houve preocupação em utilizar nenhum tipo de codificação que evitasse qualquer tipo de erro no envio/ recebimento dos dados. Apesar de alguns problemas de recepção de dados, conforme já abordado no capítulo anterior, existe sempre um padrão na informação recebida que pode ser identificado e o dado correto que deve ser considerado é possível de ser extraído. Outros testes realizados também com a comunicação serial, serão apresentados no final deste Capítulo.
- 112. 94 7.1.1 Protocolo de Comunicação (PC ↔ Circuito de IHM) A seguir, será dada uma breve explicação do protocolo de comunicação utilizado na comunicação serial entre o computador pessoal e o circuito de IHM. 7.1.1.1 Sentido do fluxo de dados (PC → Circuito de IHM) Um total de sete bytes são enviados ao circuito de IHM através do computador pessoal. Os dois primeiros bytes, CCh (11001100 em binário), são utilizados para identificar o início da comunicação entre o computador pessoal e o circuito de IHM. O nibble menos significativo do terceiro byte é utilizado para a definição do sentido de rotação dos motores, mais precisamente, os bits 0 e 1 definem o sentido de rotação do motor 1 (esquerdo) e os bits 2 e 3 definem o sentido de rotação do motor 2 (direito). A Tabela 7.1 apresenta as possibilidades de movimentação do robô de acordo com os valores definidos por esses quatro bits e a Figura 7.1, procura ilustrar de uma maneira geral o explicado na tabela. TABELA 7.1 – AÇÃO DOS MOTORES/ ROBÔ DE ACORDO COM O COMANDO RECEBIDO Bits 7 6 5 4 3 2 1 0 Motor 1 (Esquerdo) Motor 2 (Direito) Movimento do Robô(42) X X X X 0 0 0 0 Parado Parado Parado X X X X 0 0 0 1 Sentido horário Parado Gira para Esquerda X X X X 0 0 1 0 Sentido anti-horário Parado Gira para Direita X X X X 0 0 1 1 Parado Parado Parado X X X X 0 1 0 0 Parado Sentido horário Gira para Esquerda X X X X 0 1 0 1 Sentido horário Sentido horário Gira para Esquerda X X X X 0 1 1 0 Sentido anti-horário Sentido horário Frente X X X X 0 1 1 1 Parado Sentido horário Gira para Esquerda X X X X 1 0 0 0 Parado Sentido anti-horário Gira para Direita X X X X 1 0 0 1 Sentido horário Sentido anti-horário Trás X X X X 1 0 1 0 Sentido anti-horário Sentido anti-horário Gira para Direita X X X X 1 0 1 1 Parado Sentido anti-horário Gira para Direita 42 Considerando a mesma velocidade de rotação dos motores 1 e 2
- 113. 95 Bits 7 6 5 4 3 2 1 0 Motor 1 (Esquerdo) Motor 2 (Direito) Movimento do Robô (42) X X X X 1 1 0 0 Parado Parado Parado X X X X 1 1 0 1 Sentido horário Parado Gira para Esquerda X X X X 1 1 1 0 Sentido anti-horário Parado Gira para Direita X X X X 1 1 1 1 Parado Parado Parado Pelo fato de existir três estados possíveis para o motor (parado, girando no sentido horário ou girando no sentido anti-horário), leva-se à necessidade da utilização de pelo menos dois bits para cada motor, por essa razão é necessário o uso de pelo menos 4 bits para a definição correta do movimento a ser executado pelo robô. FIGURA 7.1 – AÇÃO DOS MOTORES/ ROBÔ DE ACORDO COM O COMANDO RECEBIDO
- 114. 96 O quarto e quinto bytes definem a velocidade de rotação dos motores 1 e 2 respectivamente e o sexto e sétimo bytes, definem a quantidade de pulsos que os sensores de velocidade localizados próximo às rodas devem detectar. Depois de confirmado o início da recepção (byte CChx2 reconhecido), o microcontrolador irá armazenar os cinco próximos bytes enviados pelo computador pessoal. A Figura 7.2 ilustra o pacote de informações transmitido do computador pessoal ao circuito de interface homem-máquina. FIGURA 7.2 – PACOTE DE DADOS TRANSMITIDO DO PC AO CIRCUITO DE IHM (PADRÃO #01) Além desse padrão de dados a serem transmitidos entre o computador pessoal e o circuito de IHM, existem outros dois padrões definidos, sendo: 1. leitura do sensor de ultrasom, utilizado para confirmar a distância que o obstáculo está do robô. A Figura 7.3 ilustra o protocolo de comunicação utilizado; 2. para que seja solicitado ao robô o reenvio do último dado transmitido por ele, este que tem como objetivo confirmar os dados recebidos anteriormente, ou que por algum motivo, não foram detectados pelo circuito de recepção do módulo de IHM. A Figura 7.4 ilustra neste caso, o protocolo de comunicação utilizado. Pela Figura 7.3, é possível observar que o padrão utilizado para solicitar ao robô a leitura do sensor de ultrasom é através de uma seqüência de 5 bytes iguais à FF em hexadecimal, ou seja, 255 em decimal.
- 115. 97 Pela Figura 7.4, é possível observar que o padrão utilizado para solicitar ao robô o reenvio do último dado transmitido por ele, é através de uma seqüência de 5 bytes iguais à 00 em hexadecimal, ou seja, 0 em decimal. FIGURA 7.3 – PACOTE DE DADOS TRANSMITIDO DO PC AO CIRCUITO DE IHM (PADRÃO #02) FIGURA 7.4 – PACOTE DE DADOS TRANSMITIDO DO PC AO CIRCUITO DE IHM (PADRÃO #03) 7.1.1.2 Sentido do fluxo de dados (PC ← Circuito de IHM) Nesse caso, um total de nove bytes são enviados ao computador pessoal. O primeiro byte é utilizado para identificar o início da transmissão entre o computador pessoal e o circuito de interface homem-máquina. O segundo, quarto, sexto e oitavo bytes, são os números 1, 2, 3 e 4 respectivamente, pois conforme já explicado no capítulo anterior, essa seqüência numérica é importante para identificar o dado correto enviado pelo circuito de IHM, quando existe alguma falha durante a comunicação serial entre este circuito e o microcomputador.
- 116. 98 O terceiro e quinto bytes estão relacionados com a quantidade de pulsos lidos pelos sensores de velocidade localizados próximos aos motores 1 e 2 respectivamente. O sétimo e nono bytes, contemplam respectivamente o valor do byte mais e menos significativo do registrador de 16 bits, com o tempo medido pelo microcontrolador, referente ao “tempo de vôo” da onda sonora emitida pelo sensor de ultrasom. A Figura 7.5 ilustra o pacote de informações transmitido do circuito de interface homem-máquina ao computador pessoal. FIGURA 7.5 – PACOTE DE DADOS TRANSMITIDO DO CIRCUITO DE IHM AO PC 7.2 COMUNICAÇÃO BIDIRECIONAL VIA RF Nessa comunicação, apesar da freqüência de trabalho dos módulos de comunicação ser alta, 433,92MHz, o que proporciona uma boa imunidade a ruídos e interferências, constatou- se que o envio de dados com seqüências de bits 1 ou 0, maior do que 4 bits apresentavam uma grande quantidade de erro na recepção dos dados. Com o intuito de minimizar esse erro, utilizou-se uma técnica de codificação dos dados conforme apresentado na Tabela 7.2. TABELA 7.2 – RELAÇÃO ENTRE BITS DE DADOS ORIGINAIS E CODIFICADOS Bit Original Bit Codificado 0 10 1 01 Pode ser observado que um bit 0 é substituído por dois bits 10 e um bit 1 é substituído por dois bits 01, logo é possível observar que a quantidade de bits a ser enviado é duplicada.
- 117. 99 Esse tipo de codificação é bem semelhante ao método de codificação de dados do tipo Manchester(43) , muito utilizado na comunicação de dados. Na codificação Manchester, cada bit é dividido em dois intervalos. Um bit 1 é codificado utilizando uma transição no meio do intervalo, iniciando com nível alto e, após a transição, nível baixo. Na codificação do bit 0 ocorre o inverso, iniciando com nível baixo e, após a transição, nível alto. Esse esquema garante que todo bit tenha uma transição no meio do intervalo total, tornando fácil à estação receptora a sincronização com a estação transmissora. A Figura 7.6, exemplifica a codificação conforme explicado anteriormente. FIGURA 7.6 – EXEMPLO DE CODIFICAÇÃO DOS DADOS É possível observar que utilizando-se essa técnica de codificação a maior seqüência possível de bits 0’s ou 1’s é igual a 2, dessa forma, o problema identificado anteriormente na comunicação devido a seqüências de bits iguais maiores do que 4 bits deixam de existir. Na Tabela 7.3, é possível observar a relação entre todos os valores codificados e decodificados, ou seja, em sua forma original. A Figura 7.7, tem como objetivo ilustrar o processo de codificação e decodificação (número 8 como exemplo), adotado na lógica de programação dos microcontroladores, tanto do circuito do robô, quanto do circuito de IHM. Neste exemplo, é possível observar a transição do valor inicial em sua forma original, para a forma final codificada e vice-versa. 43 FONTE: http://en.wikipedia.org/wiki/Manchester_code
- 118. 100 TABELA 7.3 – VALORES CODIFICADOS VS. VALORES DECODIFICADOS Comando Assembler Variável BIN HEX DEC Comando Assembler Variável BIN HEX DEC temp = 0 0 0 0 1 0 0 0 8 8 ld temp,X temp = 0 1 1 0 1 0 1 0 6A 106 andi temp,0x0F temp = 0 0 0 0 1 0 0 0 08 8 clr final final = 0 0 0 0 0 0 0 0 00 0 mov temp1,temp temp1 = 0 1 1 0 1 0 1 0 6A 106 clr final final = 0 0 0 0 0 0 0 0 00 0 andi temp,0x01 temp = 0 0 0 0 0 0 0 0 00 0 mov temp1,temp temp1 = 0 0 0 0 1 0 0 0 08 8 add final,temp final = 0 0 0 0 0 0 0 0 00 0 com temp temp = 1 1 1 1 0 1 1 1 F7 247 lsr temp1 temp1 = 0 0 1 1 0 1 0 1 35 53 mov temp,temp1 temp = 0 0 1 1 0 1 0 1 35 53 lsl temp temp = 1 1 1 0 1 1 1 0 EE 238 andi temp,0x02 temp = 0 0 0 0 0 0 0 0 00 0 mov desloc,temp desloc = 1 1 1 0 1 1 1 0 EE 238 add final,temp final = 0 0 0 0 0 0 0 0 00 0 mov desloc1,temp1 desloc1 = 0 0 0 0 1 0 0 0 08 8 lsr temp1 temp1 = 0 0 0 1 1 0 1 0 1A 26 andi desloc1,0x01 desloc1 = 0 0 0 0 0 0 0 0 00 0 mov temp,temp1 temp = 0 0 0 1 1 0 1 0 1A 26 andi desloc,0x02 desloc = 0 0 0 0 0 0 1 0 02 2 andi temp,0x04 temp = 0 0 0 0 0 0 0 0 00 0 add desloc,desloc1 desloc = 0 0 0 0 0 0 1 0 02 2 add final,temp final = 0 0 0 0 0 0 0 0 00 0 add final,desloc final = 0 0 0 0 0 0 1 0 02 2 lsr temp1 temp1 = 0 0 0 0 1 1 0 1 0D 13 mov temp,temp1 temp = 0 0 0 0 1 1 0 1 0D 13 lsl temp temp = 1 1 0 1 1 1 0 0 DC 220 andi temp,0x08 temp = 0 0 0 0 1 0 0 0 08 8 lsl temp1 temp1 = 0 0 0 1 0 0 0 0 10 16 add final,temp final = 0 0 0 0 1 0 0 0 08 8 mov desloc,temp desloc = 1 1 0 1 1 1 0 0 DC 220 mov desloc1,temp1 desloc1 = 0 0 0 1 0 0 0 0 10 16 andi desloc1,0x04 desloc1 = 0 0 0 0 0 0 0 0 00 0 andi desloc,0x08 desloc = 0 0 0 0 1 0 0 0 08 8 add desloc,desloc1 desloc = 0 0 0 0 1 0 0 0 08 8 add final,desloc final = 0 0 0 0 1 0 1 0 0A 10 lsl temp temp = 1 0 1 1 1 0 0 0 B8 184 lsl temp1 temp1 = 0 0 1 0 0 0 0 0 20 32 mov desloc,temp desloc = 1 0 1 1 1 0 0 0 B8 184 mov desloc1,temp1 desloc1 = 0 0 1 0 0 0 0 0 20 32 andi desloc1,0x10 desloc1 = 0 0 0 0 0 0 0 0 00 0 andi desloc,0x20 desloc = 0 0 1 0 0 0 0 0 20 32 add desloc,desloc1 desloc = 0 0 1 0 0 0 0 0 20 32 add final,desloc final = 0 0 1 0 1 0 1 0 2A 42 lsl temp temp = 0 1 1 1 0 0 0 0 70 112 lsl temp1 temp1 = 0 1 0 0 0 0 0 0 40 64 mov desloc,temp desloc = 0 1 1 1 0 0 0 0 70 112 mov desloc1,temp1 desloc1 = 0 1 0 0 0 0 0 0 40 64 andi desloc1,0x40 desloc1 = 0 1 0 0 0 0 0 0 40 64 andi desloc,0x80 desloc = 0 0 0 0 0 0 0 0 00 0 add desloc,desloc1 desloc = 0 1 0 0 0 0 0 0 40 64 add final,desloc final = 0 1 1 0 1 0 1 0 6A 106 PROCESSO DE CODIFICAÇÃO PROCESSO DE DECODIFICAÇÃO FIGURA 7.7 – PROCESSO DE CODIFICAÇÃO E DECODIFICAÇÃO DOS DADOS
- 119. 101 7.2.1 Protocolo de Comunicação (Circuito de IHM ↔ Robô) A seguir, será dada uma breve explicação do protocolo de comunicação utilizado na comunicação RF entre o circuito de interface homem-máquina e o robô. 7.2.1.1 Sentido do fluxo de dados (Circuito de IHM → Robô) Além do processo de codificação aplicado no dado trafegado por meio de radiofreqüência, para evitar que o robô executasse algum comando que não fosse exatamente o comando requisitado pelo circuito de IHM, foi adicionado à lógica de programação do robô um sistema “checksum” (44) . O conceito é o seguinte: 1. O circuito de IHM envia o comando para o robô no mínimo duas vezes; 2. Após o primeiro pacote de dados ser recebido pelo robô, os valores são somados e armazenados em uma variável; 3. Após o segundo pacote de dados ser recebido pelo robô, da mesma forma como anteriormente os valores são somados e posteriormente comparados com o resultado da soma do primeiro pacote. 4. Caso o resultado da comparação seja de valores iguais o robô executa o comando recebido, caso contrário, aguarda uma nova seqüência de dados do circuito de IHM. No fluxo de dados do circuito de IHM para o robô, um total de doze bytes codificados são enviados ao robô. Os dois primeiros bytes, CCh (11001100 em binário), são utilizados para identificar o início da comunicação entre o circuito de IHM e o robô. O terceiro e o quarto bytes, são utilizados para a definição do sentido de rotação dos motores, mais precisamente, o nibble menos significativo do terceiro byte define o sentido de rotação do motor 1 (direito) e o nibble mais significativo define o sentido de rotação do motor 2 (esquerdo). 44 FONTE: http://en.wikipedia.org/wiki/Checksum (O termo checksum é geralmente utilizado, quando pretende se referir a algum tipo de cheque redundante.
- 120. 102 O quinto e sexto bytes, definem a velocidade de rotação do motor 1, enquanto que o sétimo e oitavo bytes definem a velocidade de rotação do motor 2. O nono e décimo bytes, definem o valor de Nd, ou seja, a quantidade de variações (ímãs detectados) que o sensor do lado direito deve detectar para que em seguida, o comando de parada do motor direito seja executado. Os dois últimos bytes, definem o valor de Ne, ou seja, a quantidade de variações (ímãs detectados) que o sensor do lado esquerdo deve detectar para que em seguida, o comando de parada do motor esquerdo seja executado. Depois de confirmado o início da recepção (byte CCh reconhecido) e o processo de checksum, os dados recebidos serão decodificados. A Figura 7.8 ilustra o pacote de informações original recebido do PC e o correspondente pacote de informações codificado a ser transmitido do circuito de interface homem-máquina ao circuito de comunicação do robô. FIGURA 7.8 – PACOTE DE DADOS TRANSMITIDO DO CIRCUITO DE IHM AO ROBÔ (PADRÃO #01) Da mesma forma que na trasmissão de dados entre o PC e o circuito de IHM, além desse padrão de dados a serem transmitidos, existem outros dois padrões definidos, sendo: 1. leitura do sensor de ultrasom, na qual a Figura 7.9, procura ilustrar os dados trafegados nessa situação, tanto em sua forma original, quanto codificados. 2. reenvio dos dados pelo robô, apresentados pela Figura 7.10.
- 121. 103 FIGURA 7.9 – PACOTE DE DADOS TRANSMITIDO DO CIRCUITO DE IHM AO ROBÔ (PADRÃO #02) FIGURA 7.10 – PACOTE DE DADOS TRANSMITIDO DO CIRCUITO DE IHM AO ROBÔ (PADRÃO #03) 7.2.1.2 Sentido do fluxo de dados (Circuito de IHM ← Robô) Um total de dez bytes codificados são enviados ao circuito de interface homem- máquina. Os dois primeiros bytes, CCh (11001100 em binário), são utilizados para identificar o início da comunicação entre o circuito de IHM e o robô. O terceiro e o quarto bytes estão relacionados com a quantidade de pulsos, ímãs detectados, pelo sensor de velocidade do lado direito, assim como o quinto e sexto bytes estão relacionados com o sensor do lado esquerdo. O sétimo e oitavo bytes contemplam o valor do byte mais significativo do registrador de 16 bits, assim como o nono e décimo bytes contemplam o valor do byte menos significativo do registrador de 16 bits, este que possui o tempo medido pelo microcontrolador, referente ao “tempo de vôo” da onda sonora emitida pelo sensor de ultrasom.
- 122. 104 A Figura 7.11 ilustra o pacote de informações original e o correspondente pacote de informações codificado a ser transmitido do circuito de transmissão do robô ao circuito de interface homem-máquina. FIGURA 7.11 – PACOTE DE DADOS TRANSMITIDO DO ROBÔ AO CIRCUITO DE IHM É importante esclarecer que o byte CCh (11001100 em binário, ou 204 em decimal), está sendo utilizado para o reconhecimento do pacote de dados, pois não existe a possibilidade de se ter um caractere codificado igual ao caractere CCh, além de que a seqüência máxima de bits 0’s ou 1’s nesse byte é igual a 2. Será possível observar que após diversos testes realizados e apresentados no final deste Capítulo, enviando uma seqüência de dois bytes igual a CCh para identificar o início da transmissão de dados entre os módulos de comunicação RF, e aplicando a codificação nos demais bytes, conforme explicado anteriormente, é mais do que suficiente para garantir uma comunicação por meio de radiofreqüência confiável. Para se ter uma visão geral de todo o sistema de comunicação, a Figura 7.12 procura ilustrar o fluxo de dados trafegados entre o computador pessoal, o circuito de interface homem-máquina e o robô.
- 123. 105 FIGURA 7.12 – VISÃO GERAL DO FLUXO DE DADOS TRAFEGADOS NO SISTEMA 7.3 ALGUNS TESTES DE COMUNICAÇÃO REALIZADOS 7.3.1 Comunicação Serial (Parte 1) O objetivo principal desse teste foi o de confirmar o funcionamento do circuito elétrico proposto e da porta serial do computador, para tornar possível a comunicação entre o microcontrolador do circuito de transmissão/ recepção de dados para o robô e o computador pessoal (IHM). O teste foi realizado, utilizando-se o Software RComSerial v1.1, obtido na Internet(45) , a Figura 7.13, apresenta o software utilizado, assim como o resultado do teste executado. 45 FONTE: http://www.rogercom.com (Freeware)
- 124. 106 FIGURA 7.13 – TELA DO SOFTWARE RCOMSERIAL V1.1 E O RESULTADO OBTIDO (PARTE 1) A Figura 7.14 apresenta o circuito elétrico correspondente ao teste realizado. Nesse teste, não foi necessário nenhum tipo de desenvolvimento lógico, a nível de programação. Adotou-se o conceito de que o caractere a ser enviado, deveria ser o mesmo a ser recebido. O resultado obtido foi satisfatório e conforme o esperado. FIGURA 7.14 – DIAGRAMA ELÉTRICO DO CIRCUITO TESTE DA COMUNICAÇÃO SERIAL (PARTE 1)
- 125. 107 7.3.2 Comunicação Serial (Parte 2) O objetivo principal desse teste foi o de confirmar o funcionamento do circuito elétrico proposto e da lógica de programação desenvolvida para o microcontrolador, tornando possível a comunicação entre o microcontrolador do circuito de transmissão/ recepção de dados para o robô e o computador pessoal (IHM). O teste foi realizado, utilizando-se o software RComSerial v1.1, o mesmo utilizado no teste anterior. A Figura 7.15, apresenta o software utilizado, assim como o resultado do teste executado. FIGURA 7.15 – TELA DO SOFTWARE RCOMSERIAL V1.1 E O RESULTADO OBTIDO (PARTE 2) A Figura 7.16 apresenta o circuito elétrico correspondente ao teste realizado, assim como na Figura 7.17 é apresentado o fluxograma correspondente à lógica de programação utilizada no teste executado. Através do fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.1. - !#$%'()*+,- ./0123456789:;=?@ABCDEFGH IJKLMNOPQRSTUVWXYZ[]^_` abcdefghijklmnopqrstuvwxyz{|}~ €‚ƒ„…†‡ˆ‰Š‹ŒŽ‘’“”•–— ˜™š›œžŸ ¡¢£¤¥¦§¨©ª«¬- ®¯ °±²³´µ¶·¸¹º»¼½¾¿ÀÁÂÃÄÅÆÇ ÈÉÊËÌÍÎÏÐÑÒÓÔÕÖ×ØÙÚÛÜÝÞ ßàáâãäåæçèéêëìíîïðñòóôõö÷øùúûüý þÿ
- 126. 108 FIGURA 7.16 – DIAGRAMA ELÉTRICO DO CIRCUITO TESTE DA COMUNICAÇÃO SERIAL (PARTE 2) FIGURA 7.17 – FLUXOGRAMA DA LÓGICA UTILIZADA NA COMUNICAÇÃO SERIAL (PARTE 2) Nesse teste, foi desenvolvida a primeira parte da lógica de programação do circuito de interface com o usuário, é através dessa comunicação serial, que o computador pessoal receberá os dados dos sensores do robô, para que essas informações sejam processadas e novos dados enviados ao robô para que ele realize determinada ação. O resultado obtido foi satisfatório e conforme o esperado.
- 127. 109 7.3.3 Comunicação Serial (Parte 3) O objetivo principal desse teste foi o de confirmar o funcionamento da lógica de programação desenvolvida em Delphi® para o computador pessoal, para tornar possível a visualização e confirmação dos dados enviados pelo microcontrolador. O circuito elétrico e a lógica de programação desenvolvida para o microcontrolador não sofreram alteração em relação ao teste apresentado anteriormente (Comunicação Serial – Parte 2). A Figura 7.18 apresenta o fluxograma correspondente à lógica de programação utilizada no teste executado. A Figura 7.19 ilustra a tela do programa em execução. No fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.2. FIGURA 7.18 – FLUXOGRAMA DA LÓGICA UTILIZADA NA COMUNICAÇÃO SERIAL (PARTE 3)
- 128. 110 FIGURA 7.19 – TELA EM EXECUÇÃO DO PROGRAMA DESENVOLVIDO Esse teste foi importante para confirmar que os dados que estavam sendo enviados pelo microcontrolador seriam apresentados fielmente ao usuário. A lógica de programação desenvolvida no Delphi® apresentou um resultado satisfatório e conforme o esperado. 7.3.4 Comunicação Unidirecional Via RF (Parte 1) Esse teste teve como objetivo, a confirmação do funcionamento da transmissão de dados entre os módulos de comunicação. Inicialmente, utilizando-se um gerador de funções, uma onda quadrada foi transmitida pelo módulo de transmissão e recebida pelo módulo de recepção. A onda quadrada transmitida, juntamente com a onda quadrada recebida, pode ser verificada pelo uso de um osciloscópio, conforme ilustrado na Figura 7.20. FIGURA 7.20 – ONDA QUADRADA TRANSMITIDA (CH1) VS. ONDA QUADRADA RECEBIDA (CH2)
- 129. 111 A Figura 7.21 apresenta o circuito elétrico correspondente ao teste realizado. FIGURA 7.21 – DIAGRAMA ELÉTRICO DO CIRCUITO COMUNICAÇÃO UNIDIRECIONAL (PARTE 1) Foram realizados alguns testes com esse sistema e a Figura 7.20 apresenta as duas principais medições realizadas, uma onda quadrada na freqüência de 5,0MHz foi enviada pelo módulo de transmissão e perfeitamente recebida pelo módulo de recepção, assim como uma onda quadrada na freqüência de aproximadamente 2,5MHz foi enviada pelo módulo de transmissão e perfeitamente recebida pelo módulo de recepção. Portanto, o resultado obtido foi satisfatório e conforme o esperado. 7.3.5 Comunicação Unidirecional Via RF (Parte 2) Esse teste teve como objetivo, a confirmação do funcionamento da transmissão de dados entre os módulos de comunicação e das lógicas de programação desenvolvidas para cada um dos módulos. A Figura 7.22 apresenta o circuito elétrico dos dois módulos (receptor e transmissor) que correspondem ao teste realizado e a Figura 7.23 apresenta o fluxograma correspondente à lógica de programação utilizada no microcontrolador do módulo do transmissor. Através do fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.3.
- 130. 112 FIGURA 7.22 – DIAGRAMA ELÉTRICO DO CIRCUITO COMUNICAÇÃO UNIDIRECIONAL (PARTE 2) FIGURA 7.23 – FLUXOGRAMA DA LÓGICA UTILIZADA PARA O MÓDULO DO TRANSMISSOR
- 131. 113 A Figura 7.24 apresenta o fluxograma correspondente à lógica de programação utilizada no microcontrolador do módulo do receptor. No fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.4. FIGURA 7.24 – FLUXOGRAMA DA LÓGICA UTILIZADA PARA O MÓDULO DO RECEPTOR
- 132. 114 A lógica de programação desenvolvida para a interface com o usuário, praticamente não sofreu alteração em relação ao teste apresentado anteriormente (Comunicação Serial – Parte 3). A Figura 7.25 ilustra a tela do programa em execução. FIGURA 7.25 – TELA DO PROGRAMA DESENVOLVIDO EM EXECUÇÃO Inicialmente estava-se encontrando bastante dificuldade para obter êxito no resultado desse teste. A comunicação não constante entre os módulos de transmissão e recepção, sem que haja um protocolo de comunicação entre eles torna quase impossível de comprovar o recebimento exato da mensagem que está sendo transmitida pelo transmissor. A simulação apresentava os resultados conforme o esperado, mas o teste real falhava. Dessa forma, esse teste foi dividido em duas partes, a primeira parte, focando em testar fisicamente a lógica de programação desenvolvida para cada um dos módulos, ignorando assim os módulos de comunicação, ou seja, o circuito elétrico anteriormente apresentado na Figura 7.22, foi concebido inicialmente, conforme apresentado na Figura 7.26. Após os ajustes necessários na lógica de programação, essa parte do teste passou a apresentar o funcionamento correto, portanto, deu-se prosseguimento ao objetivo principal do teste, que após mais alguns ajustes no protocolo de comunicação (conforme explicado anteriormente neste Capítulo), o resultado obtido foi satisfatório e conforme o esperado.
- 133. 115 FIGURA 7.26 – DIAGRAMA ELÉTRICO DO TESTE DE COMUNICAÇÃO POR MEIO DE UART 7.3.6 Acionamento dos Motores (Parte 1) Esse teste teve como objetivo, a verificação do funcionamento dos motores, assim como das lógicas de programação desenvolvidas (módulos de transmissão/ recepção), para que os motores pudessem ser precisamente controlados através do computador pessoal. A Figura 7.27 apresenta o circuito elétrico dos dois módulos (receptor e transmissor) que correspondem ao teste realizado. FIGURA 7.27 – DIAGRAMA ELÉTRICO DO CIRCUITO ACIONAMENTO DOS MOTORES (PARTE 1)
- 134. 116 A Figura 7.28 apresenta o fluxograma correspondente à lógica de programação utilizada no microcontrolador do módulo do transmissor. Através do fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.6. FIGURA 7.28 – FLUXOGRAMA DA LÓGICA UTILIZADA PARA O MÓDULO DO TRANSMISSOR A Figura 7.29 apresenta o fluxograma correspondente à lógica de programação utilizada no microcontrolador do módulo do receptor. No fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.7.
- 135. 117 FIGURA 7.29 – FLUXOGRAMA DA LÓGICA UTILIZADA PARA O MÓDULO DO RECEPTOR A lógica de programação desenvolvida para a interface com o usuário, sofreu algumas alterações em relação ao teste apresentado anteriormente (Comunicação Serial – Parte 3). Foram adicionados os comandos necessários que permitissem o controle preciso dos motores. A Figura 7.30 ilustra a tela do programa em execução. Para maiores detalhes, a listagem do programa teste (apenas o adicional em relação ao apresentado no Anexo 10.1.2), pode ser encontrada no Anexo 10.1.8.
- 136. 118 FIGURA 7.30 – TELA DO PROGRAMA DESENVOLVIDO EM EXECUÇÃO Utilizando como exemplo, os comandos apresentados na Figura 7.30, o conceito da lógica de comunicação adotada, é ilustrado nas Figuras 7.31 e 7.32. FIGURA 7.31 – PACOTE DE DADOS ENVIADO PELO PC AO CIRCUITO DE TRANSMISSÃO FIGURA 7.32 – PACOTE DE DADOS ORIGINAL E CODIFICADO
- 137. 119 É possível observar que o pacote de dados original, enviado pelo PC ao circuito de transmissão, contempla primeiramente dois bytes de reconhecimento de envio dos dados, um terceiro byte que contém os comandos necessários que vão dar o sentido de rotação de cada motor, e por último dois bytes cada um responsável pela velocidade de rotação dos motores 1 e 2. Nessa fase, não é aplicada codificação para o envio dos dados. Quanto ao envio dos dados do circuito de transmissão ao circuito de acionamento dos motores, os dois primeiros bytes de reconhecimento do pacote, não sofrem nenhum tipo de codificação (não existe a possibilidade de se ter um caractere codificado igual ao caractere CCh, esse é um dos motivos pelo qual esse caractere foi utilizado para o reconhecimento do pacote, conforme detalhes abordados anteriormente neste Capítulo); já os demais caracteres, 3º byte (C8h), 4º byte (00h) e 5º byte (00h), são codificados de acordo com a Tabela 7.3. Por fim, para que esse teste funcionasse corretamente, foi necessário fazer a correlação entre os motores 1 e 2, esquerdo e direito respectivamente, com os comandos necessários para que o movimento do conjunto ocorresse da forma desejada. A Tabela 7.4, apresenta essa correlação, semelhante ao já apresentado na Tabela 7.1. TABELA 7.4 – RELAÇÃO ENTRE OS COMANDOS E OS MOVIMENTOS DOS MOTORES BIN HEX DEC Motor 1 Motor 2 Conjunto 11000000 C0 192 Parado Parado Parado 11000001 C1 193 Trás Parado Gira para esquerda 11000010 C2 194 Frente Parado Gira para direita 11000011 C3 195 Parado Parado Parado 11000100 C4 196 Parado Frente Gira para esquerda 11000101 C5 197 Trás Frente Gira para esquerda 11000110 C6 198 Frente Frente Frente 11000111 C7 199 Parado Frente Gira para esquerda 11001000 C8 200 Parado Trás Gira para direita 11001001 C9 201 Trás Trás Trás 11001010 CA 202 Frente Trás Gira para direita 11001011 CB 203 Parado Trás Gira para direita 11001100 CC 204 Parado Parado Parado 11001101 CD 205 Trás Parado Gira para esquerda 11001110 CE 206 Frente Parado Gira para direita 11001111 CF 207 Parado Parado Parado Após diversos testes e ajustes, conseguiu-se o desempenho desejado e o sistema passou a funcionar corretamente.
- 138. 120 7.3.7 Acionamento dos Motores (Parte 2) Esse teste é muito semelhante ao apresentado anteriormente, a diferença entre eles está no fato de que os comandos para o acionamento dos motores serão feitos por meio de radiofreqüência, ou seja, o objetivo desse teste é o de verificar o funcionamento dos motores, através de dados enviados a longa distância. A Figura 7.33 apresenta o circuito elétrico dos dois módulos (receptor e transmissor) que correspondem ao teste realizado. FIGURA 7.33 – DIAGRAMA ELÉTRICO DO CIRCUITO ACIONAMENTO DOS MOTORES (PARTE 2) Nesse teste, não foi necessário nenhum tipo de desenvolvimento lógico, em nível de programação. O protocolo de comunicação utilizado no teste anterior funcionou perfeitamente na comunicação sem fio. Portanto, os programas utilizados nos microcontroladores, tanto no circuito de transmissão, quanto no circuito de acionamento dos motores, não sofreram nenhuma alteração em relação ao teste anterior. O sistema apresentou um resultado muito semelhante ao anterior (comunicação direta entre os microcontroladores), exceto quando a carga da bateria de alimentação do circuito de acionamento dos motores estava baixa, onde os motores não respondiam a todos os comandos do circuito de transmissão.
- 139. 121 7.3.8 Comunicação Bidirecional Via RF Esse teste teve como objetivo testar o funcionamento da comunicação bidirecional por meio de RF entre o circuito de IHM e o circuito do robô. Nesse teste, preocupou-se apenas em garantir que a informação recebida pelo circuito de recepção da IHM, provinda do robô e transmitida ao PC fosse correta. A Figura 7.34 apresenta o circuito elétrico dos dois módulos (IHM e robô) que correspondem ao teste realizado. FIGURA 7.34 – DIAGRAMA ELÉTRICO DO CIRCUITO DE COMUNICAÇÃO BIDIRECIONAL VIA RF
- 140. 122 A Figura 7.35 apresenta o fluxograma correspondente à lógica de programação utilizada no microcontrolador do módulo da IHM. Através do fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.9. FIGURA 7.35 – FLUXOGRAMA DA LÓGICA UTILIZADA PARA O MÓDULO DA IHM A Figura 7.36 apresenta o fluxograma correspondente à lógica de programação utilizada no microcontrolador do módulo do robô. No fluxograma, é possível observar o conceito adotado na programação. Para maiores detalhes, a listagem completa desse programa teste pode ser encontrada no Anexo 10.1.10.
- 141. 123 FIGURA 7.36 – FLUXOGRAMA DA LÓGICA UTILIZADA PARA O MÓDULO DO ROBÔ A lógica de programação utilizada para a interface com o usuário, é a mesma da apresentada anteriormente (Acionamento dos Motores – Parte 1). A Figura 7.37 ilustra a tela do programa em execução. FIGURA 7.37 – TELA DO PROGRAMA DESENVOLVIDO EM EXECUÇÃO É possível também observar na Figura 7.37 a seqüência de números recebidos pelo módulo de IHM, informação enviada pelo módulo de transmissão do robô. Seqüência de números Byte de identificação dos dados (CCh)
- 142. 124 O pacote de dados original, enviado pelo PC ao circuito de IHM, é o mesmo que o já demonstrado nas Figuras 7.31 e 7.32, assim como esses dados que são codificados e transmitidos ao módulo de recepção do robô. Quando os dados são recebidos e reconhecidos pelo módulo do robô, o microcontrolador deste módulo armazena uma seqüência de 1 a 3 na memória, codifica esses dados e envia essa seqüência de números, juntamente com os dois primeiros bytes de identificação de início de pacote (CCh), através do módulo de transmissão do robô, para o módulo de recepção da IHM. Quando os dados são recebidos e reconhecidos pelo módulo de IHM, esses dados são decodificados e enviados por meio de comunicação serial ao PC, para que o usuário possa visualizar os dados transmitidos pelo robô. Para que esse teste funcionasse corretamente, no caso do módulo de IHM, que pode receber ou transmitir dados, tanto do PC, quanto dos módulos de comunicação RF, foi necessário estabelecer uma espécie de chave de seleção para uma comunicação isolada entre o microcontrolador e os módulos de comunicação RF e o PC. Para isso, foi utilizado um buffer de três estados, possibilitando dessa forma, o controle do fluxo de dados recebidos e transmitidos. A Figura 7.38, ilustra o conceito adotado. FIGURA 7.38 – CONCEITO SELETIVO ADOTADO PARA A COMUNICAÇÃO BIDIRECIONAL É possível observar pela Figura 7.38, que os pinos 1 e 2 do microcontrolador é que definirão de qual módulo o sistema irá receber ou transmitir os dados. No caso, quando o pino 1 do AVR é colocado em nível baixo, a recepção com o robô e a transmissão com o PC são habilitadas, quando o pino 2 do AVR é colocado em nível baixo, a recepção com o PC e a transmissão com o robô são habilitadas.
- 143. 125 Após adotar esse conceito de seleção chaveado, a comunicação bidirecional entre os módulos funcionou perfeitamente.
- 144. 126 8 INFORMAÇÕES ADICIONAIS 8.1 CIRCUITO DE GRAVAÇÃO DO MICROCONTROLADOR Inicialmente, juntamente com o circuito de interface com o usuário, encontrava-se o circuito utilizado para realizar a gravação dos dados no microcontrolador. A Figura 8.1 apresenta o diagrama elétrico desse circuito. Essa prática ajudou muito no desenvolvimento do sistema, evitando gastos com circuitos disponíveis no mercado e também facilitando, nos diversos testes realizados que requeriam constantes gravações lógicas nos microcontroladores do sistema. FIGURA 8.1 – DIAGRAMA ELÉTRICO DO CIRCUITO DE GRAVAÇÃO DO MICROCONTROLADOR A Tabela 8.1 apresenta a lista de componentes utilizados para a realização da gravação da lógica de programação no microcontrolador, assim como o custo de mercado encontrado para cada um dos componentes.
- 145. 127 TABELA 8.1 – LISTA DE COMPONENTES DO CIRCUITO DE GRAVAÇÃO (MICROCONTROLADOR) Designação Nomenclatura(46) Fabricante Valor/Unid. Qtd Custo(47) (R$) Microcontrolador AT90S8515 Atmel - 1 15,00 Buffer de Três-Estados HD74HC244 Hitachi - 1 1,30 Cristal Q1 KDS 4MHz 1 1,30 Capacitor C1 e C2 Thonson 27pF 2 0,40 Capacitor C3 e C4 Thonson 100nF 2 0,40 Resistor R1 e R3 Acel 300 2 0,10 Resistor R4 e R5 Acel 1K 2 0,10 Resistor R2 Acel 100K 1 0,05 Diodo 1N4007 Mic 1N4007 2 0,10 Diodo de Sinal 1N4148 Cons. 1N4148 1 0,05 Regulador de Tensão 7805L STMicroelectronics 5V 1 1,00 LED LED1 Cons. Vermelho 1 1,20 Cabo Paralelo Adaptado Paralelo Leadership DB25 1 3,50 8.2 ESTRUTURA MECÂNICA As razões principais analisadas para a escolha da estrutura mecânica, em termos de tamanho e material foram: - peso mínimo, na qual os motores de corrente contínua pudessem atuar de forma satisfatória; - tamanho mínimo, mas que proporcionasse uma boa dinâmica ao robô e que o circuito de controle pudesse ser bem acondicionado e protegido; - material fácil de ser retrabalhado e resistente à colisões. Os principais tipos de matéria-primas analisadas foram: plásticos, isopor, ciba-tool e madeira balsa. A Tabela 8.2, apresenta um pequeno sumário das principais características de cada um desses tipos de materiais. 46 Nomenclatura baseada no circuito elétrico apresentado na Figura 8.1 47 Valor médio aproximado encontrado na Região Sudeste (São Paulo, 2006)
- 146. 128 TABELA 8.2 – ESTRUTURA MECÂNICA (TIPOS DE MATERIAIS AVALIADOS) Ciba-Tool(48) (Renshape)Características Unidade 5030 440 Madeira Balsa(49) Plásticos(50) (Polipropileno) Isopor(51) (Poliestireno Expandido) Aplicações - Modelos de estilo e testes de programas Modelos de estilo, maquetes, testes de programas Iscas de peixe, aeromodelismo, etc. Brinquedos, recipientes para alimentos, ventiladores, etc. Protetor de equipamentos, isolantes térmicos, pranchas para flutuação, etc. Densidade g/cm3 0,30 0,52 - 0,57 0,35 0,89 0,015 - 0,030 Resistência à flexão N/mm2 6 - 8 15 - 17 9,50 34,47 0,06 - 0,48 Resistência à compressão N/mm2 6 - 8 9 - 10 11,64 24,13 0,06 - 0,25 Conforme já explicado, a estrutura do robô além de ser responsável pela rigidez, deve ter baixo peso, dimensões adequadas à aplicação do robô, deve ser resistente e deve ser fácil de ser manufaturado. Obviamente o projeto da estrutura mecânica deve estar associado ao ambiente onde o robô deverá se movimentar. A proposta inicial adotada para este robô, conforme é apresentado na Figura 8.2, foi utilizando um material de composto plástico chamado ciba-tool, que após testes de resistência à tração e compressão, apresentou resultados muito bons, resistindo à quedas e colisões sem lascar. Sua estrutura um pouco esponjosa ajuda a absorver o impacto e possui um peso muito baixo. A estrutura final utilizada, foi desenvolvida em madeira balsa, sendo que os dois principais motivos são: fácil de ser retrabalhado e fácil de ser encontrado no mercado. Fazendo uma breve análise dos dados apresentados na Tabela 8.2, e utilizando a madeira balsa como referência, é possível observar que o ciba-tool (440), apresenta uma densidade maior em relação a madeira balsa, o que é um ponto negativo, pois significa que é um material mais pesado, a resistência à flexão é maior, porém a resistência à compressão é menor. Comparando a madeira balsa, com o tipo de plástico polipropileno, que são aqueles plásticos utilizados para fazer brinquedos, embalagens para alimentos e remédios, apresentam uma resistência à flexão e compressão bem superiores a da madeira, o que é um fator positivo, 48 FONTE: Huntsman Renshape Solutions Datasheet 49 FONTE: http://www.webcoreonline.com 50 FONTE: http://www.owenscorning.com.br/interat.asp 51 FONTE: http://www.acepe.pt/eps/eps_prop_tab.asp
- 147. 129 entretanto a densidade é duas vezes e meia maior, o que é um fator bem desfavorável já que o peso é uma preocupação necessária devido a potência dos motores utilizados. FIGURA 8.2 – ESTRUTURA INICIAL (CIBA-TOOL) A Figura 8.3, apresenta a estrutura final em madeira balsa, projetada para o robô. FIGURA 8.3 – ESTRUTURA FINAL (MADEIRA BALSA) 8.3 CUSTO TOTAL DO SISTEMA Apesar de já apresentado nas Tabelas 4.1 e 4.2 o custo dos principais componentes utilizados, neste capítulo, pretende-se apresentar de uma maneira mais completa e detalhada, o custo total do sistema (incluindo também o circuito de gravação para o microcontrolador),
- 148. 130 mesmo que em alguns casos os valores considerados sejam aproximados, pois alguns dos componentes não foram adquiridos comercialmente, mas sim reutilizados de projetos anteriores, ou até mesmo, doados de instituições/ pessoas físicas como incentivo. Pretende-se nessa seção, listar não só os componentes eletrônicos, mas também os materiais utilizados para o completo desenvolvimento do projeto. A Tabela 8.3, apresenta a lista completa de todos os componentes utilizados. TABELA 8.3 – LISTA DE COMPONENTES/ MATERIAIS UTILIZADOS Designação Descrição Fabricante Valor/Unid. Qtd Custo(52) (R$) Microcontrolador AT90S8515 Atmel - 2 30,00 RS232 Transceiver MAX232 Maxim - 1 2,50 Buffer de Três-Estados HD74HC244 Hitachi - 3 3,90 Receptor RF RR3 Telecontrolli 433,92MHz 2 35,00 Transmissor RF RT4 Telecontrolli 433,92MHz 2 35,00 Cristal Xtal KDS 4MHz 2 2,60 Ponte H (Driver) L298N STMicroelectronics - 1 12,30 Capacitor Cerâmico Thonson 27pF 4 0,80 Capacitor Cerâmico Thonson 33pF 2 0,40 Capacitor Cerâmico Thonson 100nF 3 0,60 Capacitor Eletrolítico Thonson 1µF 4 0,80 Resistor F. Carbono Acel 10K 2 0,10 Resistor F. Carbono Acel 2,7K 2 0,10 Resistor F. Carbono Acel 300 3 0,15 Resistor F. Carbono Acel 27 2 0,10 Resistor F. Carbono Acel 1K 2 0,10 Resistor F. Carbono Acel 100K 1 0,05 Diodo 1N4007 Mic 1N4007 2 0,10 Diodo de Sinal 1N4148 Cons. 1N4148 1 0,05 Regulador de Tensão 7805L STMicroelectronics 5V 2 2,00 LED Redondo Cons. Vermelho 11 13,20 Motores CC - Faulhaber 1516E012S 2 340,00(53) Redutor - Faulhaber 15/3K 41:1 2 510,00(53) 52 Valor médio aproximado encontrado na Região Sudeste (São Paulo, 2006) 53 FONTE: motores@martebal.com.br (Divisão Faulhaber do Brasil, Santa Rita do Sapucaí, Minas Gerais, 2006)
- 149. 131 Designação Descrição Fabricante Valor/Unid. Qtd Custo(52) (R$) Sensor de Ultrasom Sonar Tato Eletrônicos - 1 50,00(54) Sensor de Velocidade KMI18/2 NXP 2 30,00(55) Ímãs Neodímeo Oximag - 24 9,60(56) Cabo Paralelo Adaptado Paralelo Leadership DB25 1 3,50 Soquete Torneado - 40 pinos 2 4,00 Soquete Torneado - 20 pinos 2 2,60 Soquete Torneado - 16 pinos 1 0,80 Bateria Recarregável Panasonic 9V 2 40,00 Clip para Bateria - - 9V 2 2,00 Rodas - - - 2 12,00 PCI Universal - 10x5cm 2 12,00 PCI Universal - 10x10cm 1 6,50 Cabo Serial - DB09 1 5,00 Outros Materiais(57) - - - - 15,00 TOTAL - - - - 1.182,85 Com base nos valores apresentados acima, a Figura 8.4, procura ilustrar graficamente o custo total do projeto, dividido pelos seus principais componentes. É possível observar que o custo do projeto é relativamente alto R$1.182,85, quando analisado o seu valor total de forma isolada. Analisando mais detalhadamente, os custos dos motores e dos redutores, são praticamente 72% do valor total do projeto, desconsiderando esses valores, conforme apresentado na Figura 8.5, o valor de custo total do projeto cai para R$332,85. Fazendo uma pesquisa no mercado é possível avaliar a possibilidade provável de se encontrar motores que atendem os requisitos mínimos de torque e potência desse projeto com valores de custo bem mais acessíveis. 54 FONTE: http://www.tato.ind.br/ (Tato Eletrônicos, São Paulo, 2006) 55 FONTE: http://www.nxp.com/ (NXP Semiconducters, 2007) 56 FONTE: http://www.oximag.com/principal.htm (Oximag) 57 Outros materiais considerados: estanho, fita isolante, cola, fios de cobre (esmaltado e encapado), madeira (balsa e ciba-tool), chave liga/desliga, botão de reset, barras de terminais, conectores e jumpers
- 150. 132 72% 2% 2% 7% 3% 6% 10% 0,00 100,00 200,00 300,00 400,00 500,00 600,00 700,00 800,00 900,00 Componentes Passivos Componentes Ativos Microcontrolador Sensores Transmissor / Receptor Diversos Motores DC (R$) 0% 8% 17% 25% 34% 42% 50% 59% 67% 76% (%) Circuito da IHM Robô % R$ 1.082,85 (92%) R$ 100,50 (8%) FIGURA 8.4 – GRÁFICO DO CUSTO TOTAL DO SISTEMA (CONSIDERANDO OS MOTORES) 34% 21% 9% 24% 6%6% 0,00 20,00 40,00 60,00 80,00 100,00 120,00 Componentes Passivos Componentes Ativos Microcontrolador Sensores Transmissor / Receptor Diversos (R$) 0% 6% 12% 18% 24% 30% 36% (%) Circuito da IHM Robô % R$ 100,50 (30%) R$ 232,35 (70%) FIGURA 8.5 – GRÁFICO DO CUSTO TOTAL DO SISTEMA (DESCONSIDERANDO OS MOTORES)
- 151. 133 9 CONCLUSÃO Este trabalho teve como objetivo principal, o desenvolvimento de um robô móvel capaz de explorar ambientes hostis sem a intervenção humana, com a capacidade de detectar obstáculos e que apresentasse resultados confiáveis, com qualidade e baixo custo. Grande parte do trabalho desenvolvido e dos conceitos adotados podem ser utilizados em diversas outras aplicações similares. Pode-se citar os seguintes exemplos: - os conceitos de programação aplicados no controle e compensação da velocidade dos motores, utilizados para permitir que o caminho percorrido pelo robô seja o mais próximo possível de uma linha reta; - a lógica implementada que permite definir o ângulo correto desejado que o robô percorra; - o protocolo de comunicação criado para minimizar os erros de comunicação por radiofreqüência; - entre outros. Com relação à comunicação por meio de radiofreqüência, os módulos utilizados apresentaram bons resultados ao longo dos testes realizados quando o protocolo de comunicação e o sistema de codificação (similar ao Manchester) desenvolvido eram aplicados, caso contrário, a comunicação se tornava impraticável para o objetivo traçado. Como sugestão para simplificar o circuito elétrico e a lógica de programação, poderia ser utilizado um módulo de comunicação integrado, ou seja, com comunicação bidirecional, para que não fosse necessário utilizar dois módulos independentes, um para a transmissão e outro para a recepção. No desenvolvimento do trabalho, procurou-se também apresentar a maioria dos testes realizados e de uma forma bem detalhada, além das lógicas de programação desenvolvidas, permitindo a sua perfeita reprodução. É importante salientar, que no desenvolvimento do projeto, a estrutura física adotada para o robô, foi apenas um meio utilizado para se poder demonstrar o conceito de controle, mapeamento e comunicação implementado. Para que o robô possa ser utilizado em qualquer ambiente hostil, independente do caminho a ser percorrido, é necessário que sejam estudadas melhores formas estruturais. É importante a princípio pelo menos considerar que a estrutura seja capaz de proteger os circuitos eletrônicos, que dê uma boa durabilidade ao sistema, que
- 152. 134 consiga absorver os impactos devido à movimentação em terrenos irregulares e que não seja afetado se estiver operando em ambientes úmidos, tóxicos, ou com temperaturas elevadas. De uma maneira geral, através do resultado dos testes executados, o sistema implementado apresentou resultados satisfatórios, entretanto, sempre há espaço para melhorias quando se trata de conceitos envolvendo a eletrônica e a mecânica. Componentes mais baratos podem ser substituídos por componentes mais robustos e velozes, como por exemplo, os módulos de RF. Abaixo são listadas algumas sugestões adicionais para uma possível melhoria do sistema desenvolvido: - Utilizar um único motor, mais potente, para que o movimento em linha reta seja preciso, não sofrendo interferência devido as diferentes características existentes entre os motores. As movimentações em curva podem ser feitas utilizando-se um servomotor na frente, com um ângulo de giro limitado. - Adicionar ao sistema uma bússola digital para garantir a precisão na definição do ângulo de giro do robô. - Considerar além do método de odometria utilizado, alguma medição adicional, como a inclusão de um GPS, para garantir que erros não sistemáticos, como escorregamento das rodas (solo escorregadio, aceleração acentuada, etc...), possam ser de alguma forma identificados. - Aumentar a resolução do sistema de odometria, incluindo uma maior quantidade de ímãs, dessa forma a precisão e a medição do caminho a ser percorrido é melhorado de forma significativa. - Incluir no robô um sistema de medição do nível de tensão da bateria, para que o sistema possa compensar automaticamente os ajustes de calibração. - Adicionar outros sensores de ultrasom, ou um sistema de movimentação angular do sensor utilizado, para que o ambiente possa ser mapeado 360º, sem a necessidade de movimentação do robô. - Adicionar um segundo microcontrolador, dedicado ao controle dos motores e leitura dos sensores de velocidade, permitindo um mapeamento constante do movimento do robô e não somente o resultado final do caminho percorrido pelo robô. - Implementar na programação do software de controle, uma lógica que possibilite o mapeamento do ambiente sem a necessidade da intervenção humana, ou seja, aplicar conceitos que com base nos dados recebidos dos sensores do robô, este seja capaz de movimentar-se de forma autônoma.
- 153. 135 Tentou-se, de uma forma geral, abranger todos os passos necessários para a construção de um robô móvel que pode ser facilmente adaptado para o desenvolvimento de trabalhos de pesquisa e acadêmicos. Não existe limite para a aplicação e melhoria de qualquer sistema que esteja relacionado com a robótica. O limite está apenas na imaginação dos seres humanos.
- 154. 136 10 ANEXOS 10.1 LISTAGEM DOS PROGRAMAS 10.1.1Programa Comunicação Serial (Parte 2) PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa Comunicação Serial (Parte 2) Linguagem: Assembler Arquivo: TRPC.asm Objetivo: Testar a Comunicação Serial entre o Microcontrolador e o PC Descrição: Uma seqüência de bytes de 0 a 255 é enviada pelo microcontrolador ao PC utilizando-se a UART. .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def desloc = r17 .def desloc1 = r18 rjmp RESET ;Pula para o Programa Principal .org UDREaddr ;UART Data Register Empty Interrupt Vector Address inc temp ;Incrementa a variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o ;registrador de dados da UART out PORTB,temp ;Envia a mesma informação para o Port B ;** Loop de Atraso Atraso: ldi desloc,255 ldi desloc1,255 Loop: dec desloc brne loop dec desloc1 brne loop reti ;Retorna da Interrupção RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0xFF out DDRB,temp ;Port B configurada como saída out PORTB,temp ;Garante 0 inicialmente na saída ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão clr temp ;Limpa a variável temp sei ;Seta a Interrupção
- 155. 137 Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA 10.1.2Programa Comunicação Serial (Parte 3) PROGRAMA PARA COMPUTADOR PESSOAL Título: Programa Comunicação Serial (Parte 3) Linguagem: Delphi (Pascal) Arquivo: CSerial.pas Objetivo: Testar a Comunicação Serial entre o Microcontrolador e o PC Descrição: Uma seqüência de bytes de 0 a 255 é enviada pelo microcontrolador ao PC utilizando-se a UART e os dados são mostrados ao usuário. unit CSerial; interface uses Windows, Messages, SysUtils, Classes, Graphics, Controls, Forms, Dialogs, StdCtrls, Menus, ExtCtrls, FileCtrl, Buttons, jpeg, Registry; type TMultlinha = class(TThread) private protected procedure Execute; override; procedure MostraString; //Mostra dados na tela. end; type TForm1 = class(TForm) SpeedAbrirPorta: TSpeedButton; SpeedFecharPorta: TSpeedButton; SpeedSair: TSpeedButton; Label2: TLabel; Label41: TLabel; LabelStrRecebida: TLabel; Bevel1: TBevel; ComboBoxPorta: TComboBox; procedure FormCreate(Sender: TObject); procedure SpeedAbrirPortaClick(Sender: TObject); procedure SpeedSairClick(Sender: TObject); procedure SpeedFecharPortaClick(Sender: TObject); procedure FormCloseQuery(Sender: TObject; var CanClose: Boolean); procedure MostraPortasCom(); //Mostra portas COMx. private { Private declarations } public { Public declarations } end; const LEN_BUFFER = 100; //Tamanho dos Buffers de dados. var Form1: TForm1; hCom: THANDLE; //Handle da Porta Serial (API). dcb: TDCB; //Estrutura DCB (API). CommTimeouts: TCOMMTIMEOUTS; //Estrutura TCOMMTIMEOUTS (API). BytesLidos: DWORD; BufferRecebe : array [0..LEN_BUFFER] of Integer; //Define o buffer. GLB_Conectado:boolean; //Indica se a porta já está aberta.
- 156. 138 GLBEnviaDados:bool; //Para habilitar/desabilitar o envio de dados pela serial. VRecebido: String; implementation {$R *.DFM} //Abre a porta serial especificada. function AbrirPorta(NomePorta:String):boolean; begin hCom := CreateFile( PChar(NomePorta), GENERIC_READ or GENERIC_WRITE, 0, //Dispositivos COM abertos com acesso exclusivo. nil, //Sem atributos de segurança. OPEN_EXISTING, //deve usar OPEN_EXISTING. 0, //Entrada e saída sem overlap. 0 //Deve ser NULL para COM. ); if(hCom = INVALID_HANDLE_VALUE) then //Se houve algum erro ao abrir a porta. result := false else result:= true; end; //Define Timeouts. Function ConfiguraTimeOuts:boolean; begin if not GetCommTimeouts(hCom, CommTimeouts) then result:= false; CommTimeouts.ReadIntervalTimeout := 2; CommTimeouts.ReadTotalTimeoutMultiplier := 0; CommTimeouts.ReadTotalTimeoutConstant := 2; CommTimeouts.WriteTotalTimeoutMultiplier := 5; CommTimeouts.WriteTotalTimeoutConstant := 5; if not SetCommTimeouts(hCom, CommTimeouts) then result:= false else result:= true; end; //Configura Porta Serial. Function ConfiguraControle:boolean; begin if not GetCommState(hCom, dcb) then result:= false; dcb.BaudRate := CBR_2400; //define velocidade em bps. dcb.ByteSize := 8; //define bits de dados. dcb.Parity := NOPARITY; //define paridade. dcb.StopBits := ONESTOPBIT; //define stop bit. if not SetCommState(hCom, dcb) then result:= false else result:= true; end; procedure TForm1.FormCreate(Sender: TObject); begin //Inicializa variáveis Globais. GLB_Conectado := false; //Indica se a porta já está aberta. GLBEnviaDados := false; //Para habilitar/desabilitar o envio de dados pela serial. MostraPortasCom; //Carrega os nomes das porta COM num FilterComboBox. end; procedure TForm1.SpeedAbrirPortaClick(Sender: TObject); var Sucesso:boolean; begin if AbrirPorta(ComboBoxPorta.Text) = true then //Abre a porta serial. begin GLB_Conectado := true; Sucesso := ConfiguraControle(); Sucesso := ConfiguraTimeOuts(); if Sucesso = false then begin GLB_Conectado := false;
- 157. 139 CloseHandle(hCom); //Fecha a porta Serial. ShowMessage('Um outro programa já está usando a porta, ou a mesma não existe!'); end else begin SpeedAbrirPorta.Enabled := false; SpeedFecharPorta.Enabled := true; ComboBoxPorta.Enabled := false; TMultlinha.Create(false); //Inicia processo. end; end else begin GLB_Conectado := false; ShowMessage('Um outro programa já está usando a porta, ou a mesma não existe!'); end; end; procedure TForm1.SpeedSairClick(Sender: TObject); begin Close(); end; procedure TForm1.SpeedFecharPortaClick(Sender: TObject); begin SpeedFecharPorta.Enabled := false; SpeedAbrirPorta.Enabled := true; ComboBoxPorta.Enabled := true; GLB_Conectado := false; CloseHandle(hCom); //Fecha a porta serial. end; //Mostra os nomes das portas COM instaladas no sistema num ComboBox. procedure TForm1.MostraPortasCom(); var Registro: TRegistry; //Para trabalhar com os Registros do windows. Lista: Tstrings; indice: Integer; //Para incrementar. begin Registro := TRegistry.Create; //Cria e aloca espaço na memória para o objeto. try Registro.RootKey := HKEY_LOCAL_MACHINE; //Define chave raiz. Registro.OpenKey('hardwaredevicemapserialcomm', False); //Abre a chave. Lista := TstringList.Create; try //Obtém uma string contendo todos os nomes de valores associados com a chave atual. Registro.GetValueNames(Lista); //Pega os nomes das portas. for indice := 0 to Lista.Count - 1 do //Count é a quantidade de portas existentes. ComboBoxPorta.Items.Add(Registro.ReadString( Lista.Strings[indice] )); //Adiciona os nomes das portas no ComboBox1. if ComboBoxPorta.Items.Count 0 then ComboBoxPorta.ItemIndex := 0; //Para exibir o nome da porta. finally Lista.Free; end; Registro.CloseKey; finally Registro.Free; end; end; //Mostra dados de forma sincronizada. procedure TMultlinha.MostraString; begin Form1.LabelStrRecebida.Caption := VRecebido; end; //Trata a Porta Serial. procedure TMultlinha.Execute; var cont:DWORD; StrMens:AnsiString; tama:integer; begin while not Terminated do //loop infinito. Vida do programa. begin
- 158. 140 if GLB_Conectado = true then //Se a porta serial foi aberta corretamente. begin BytesLidos := 0; cont := 0; if Readfile(hCom, BufferRecebe[cont], LEN_BUFFER, BytesLidos, nil) then //Lê a porta Serial. VRecebido:=IntToStr(BufferRecebe[Cont]); if BytesLidos 0 then //Se algum caracter foi lido. begin while cont BytesLidos do //Enquanto há caracteres a serem lidos. begin Synchronize(MostraString); //Mostra dados na tela. cont := cont + 1; end; //Fim Do while 2. end; end else begin Sleep(1); //Para não travar o processo. end; end; //Fim Do while 1. end; procedure TForm1.FormCloseQuery(Sender: TObject; var CanClose: Boolean); begin if(GLB_Conectado = true) then CloseHandle(hCom); end; end. //FIM DO PROGRAMA 10.1.3Programa Comunicação Unidirecional Via RF (Transmissor) PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa Comunicação Unidirecional Via RF (Parte 2) Módulo: Transmissão Linguagem: Assembler Arquivo: CUniT_P2.asm Objetivo: Testar a Comunicação por meio de RF entre os Módulos de Comunicação Descrição: Uma seqüência de 9 bytes deve ser enviada através da UART sendo: Bytes 1 e 2: CCh (Identificação de Protocolo) Bytes 3 a 9: Dados Codificados (Seqüência numérica de 0 à 6) Lembrando que: 1 = 01 (Codificado) 0 = 10 (Codificado) .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def desloc = r17 .def desloc1 = r18 .def desloc2 = r19 .def dado = r20 .def count = r21 .def temp1 = r22 .def temp2 = r23 .def temp3 = r24 .def final = r25 rjmp RESET ;Pula para o Programa Principal .org UDREaddr ;UART Data Register Empty Interrupt Vector Address inc XL ;Posiciona o ponteiro
- 159. 141 ld temp,X ;Carrega o dado na variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o ;registrador de dados da UART out PORTB,temp ;Envia a mesma informação para o Port B cpi XL,0x69 ;Compara para saber se o último caractere foi enviado breq Atraso ;Pula para o bloco de Atraso reti ;Retorna da Interrupção Codificando: andi temp,0x0F ;Codifica apenas os quatro primeiros bits (AND com 00001111b) clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 com temp ;Faz o complemento da variável temp lsl temp ;Desloca os bits da variável temp para a esquerda mov desloc,temp ;Copia o valor da variável temp para a variável desloc mov desloc1,temp1 ;Copia o valor da variável temp1 para a variável desloc1 andi desloc1,0x01 ;Codifica o primeiro bit (AND com 00000001b) andi desloc,0x02 ;Codifica o primeiro bit (AND com 00000010b) add desloc,desloc1 ;Adiciona o valor da variável desloc1 à variável desloc add final,desloc ;Adiciona o valor da variável desloc à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov desloc,temp ;Copia o valor da variável temp para a variável desloc mov desloc1,temp1 ;Copia o valor da variável temp1 para a variável desloc1 andi desloc1,0x04 ;Codifica o segundo bit (AND com 00000100b) andi desloc,0x08 ;Codifica o segundo bit (AND com 00001000b) add desloc,desloc1 ;Adiciona o valor da variável desloc1 à variável desloc add final,desloc ;Adiciona o valor da variável desloc à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov desloc,temp ;Copia o valor da variável temp para a variável desloc mov desloc1,temp1 ;Copia o valor da variável temp1 para a variável desloc1 andi desloc1,0x10 ;Codifica o terceiro bit (AND com 00010000b) andi desloc,0x20 ;Codifica o terceiro bit (AND com 00100000b) add desloc,desloc1 ;Adiciona o valor da variável desloc1 à variável desloc add final,desloc ;Adiciona o valor da variável desloc à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov desloc,temp ;Copia o valor da variável temp para a variável desloc mov desloc1,temp1 ;Copia o valor da variável temp1 para a variável desloc1 andi desloc1,0x40 ;Codifica o quarto bit (AND com 01000000b) andi desloc,0x80 ;Codifica o quarto bit (AND com 10000000b) add desloc,desloc1 ;Adiciona o valor da variável desloc1 à variável desloc add final,desloc ;Adiciona o valor da variável desloc à variável final inc XL ;Incrementa o ponteiro st X,final ;Armazena o dado no ponteiro cpi dado,9 ;Compara para saber se todos os dados foram codificados breq Transmitir ;Caso positivo pula para o bloco Transmitir rjmp MaisUm ;Pula para o bloco MaisUm ;** Loop de Atraso Atraso: cli ;Desabilita a Interrupção ldi desloc,255 ldi desloc1,255 ldi desloc2,2 Loop: dec desloc brne loop dec desloc1 brne loop dec desloc2 brne loop rjmp Transmitir ;Pula para o bloco Transmitir RESET: ;** Programa Principal ;** Inicialização de Stack Pointer
- 160. 142 ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0xFF out DDRB,temp ;Port B configurada como saída ser temp out PORTB,temp ;Garante 0 inicialmente na saída ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão ;** Armazenamento das informações a serem transmitidas ldi XL,0x60 ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp ;Armazena o mesmo valor no ponteiro inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor no ponteiro MaisUm: inc dado ;Incrementa a variável dado mov temp,dado ;Copia o valor da variável dado para a variável temp mov temp2,dado ;Copia o valor da variável dado para a variável temp2 rjmp Codificando ;Pula para o bloco Codificando Transmitir: sei ;Habilita a Interrupção ldi XL,0x5F ;Posiciona o ponteiro Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA 10.1.4Programa Comunicação Unidirecional Via RF (Receptor) PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa Comunicação Unidirecional Via RF (Parte 2) Módulo: Recepção Linguagem: Assembler Arquivo: CUniT_P2.asm Objetivo: Testar a Comunicação por meio de RF entre os Módulos de Comunicação Descrição: Uma seqüência de 9 bytes deve ser recebida através da UART sendo: Bytes 1 e 2: CCh (Identificação de Protocolo) Bytes 3 a 9: Dados Codificados (Seqüência numérica de 0 à 6) Por fim, os dados decodificados são transmitidos ao PC utilizando-se a UART. Lembrando que: 1 = 01 (Codificado) 0 = 10 (Codificado) .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def temp1 = r17 .def final = r18 .def count = r19 .def desloc = r20
- 161. 143 .def desloc1 = r21 .def desloc2 = r22 .def chave = r23 rjmp RESET ;Pula para o Programa Principal .org URXCaddr ;UART Receive Complete Interrupt Vector Address rjmp Receber .org UDREaddr ;UART Data Register Empty Interrupt Vector Address rjmp Convertendo Receber: in temp,UDR ;Lê os dados recebidos inc count ;Incrementa a variável count cpi count,3 ;Compara a variável count com 3 brlo Confirmar ;Pula para o bloco Confirmar se count for menor que 3 rjmp Armazena ;Pula para o bloco Armazena ;** Reconhecimento de pacote de dados válidos Confirmar: cpi temp,0xCC ;Compara a variável temp com 11001100b breq Confirmado ;Pula para o bloco Confirmado se temp for igual a CCh clr count ;Limpa a variável count reti ;Retorna da Interrupção Confirmado: reti ;Retorna da Interrupção ;** Armazenamento dos dados recebidos após identificação do protocolo Armazena: inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,9 ;Compara count com 9 para armazenar até 7 caracteres recebidos breq Converte ;Pula para Decodificar os dados se count for igual à 9 reti ;Retorna da Interrupção Converte: cli ;Desabilita a Interrupção ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão ldi XL,0x5F ;Posiciona o ponteiro ldi temp,0b11111111 out PORTB,temp ;Desabilita comunicação com o Receptor sei ;Habilita a Interrupção rjmp Volta ;Pula para o bloco Volta Convertendo: inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 andi temp,0x01 ;Verifica o valor do primeiro bit (AND com 00000001b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x02 ;Verifica o valor do segundo bit (AND com 00000010b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x04 ;Verifica o valor do terceiro bit (AND com 00000100b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x08 ;Verifica o valor do quarto bit (AND com 00001000b) add final,temp ;Adiciona o valor da variável temp à variável final out UDR,final ;Envia os dados decodificados para o Registrador de Dados da UART out PORTB,final ;Envia a mesma informação para o Port B (mostra nos LED's) ;** Loop de Atraso Atraso: ldi desloc,255 ldi desloc1,255 ldi desloc2,4 Loop: dec desloc
- 162. 144 brne loop dec desloc1 brne loop dec desloc2 brne loop cpi XL,0x66 ;Compara para saber se o último caractere foi enviado breq DeNovo ;Reinicia o processo se os 7 caracteres já tiverem sido enviados reti ;Retorna da Interrupção RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0xFF out DDRB,temp ;Port B configurada como saída ser temp out PORTB,temp ;Garante 0 inicialmente na saída ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) DeNovo: cli ;Desabilita a Interrupção ldi temp,0b11111110 out PORTB,temp ;Habilita a comunicação com o Receptor ldi temp,0b10010000 out UCR,temp ;Habilita recepção e interrupção por recepção completa de dados clr count ;Limpa a variável count clr temp ;Limpa a variável temp ldi XL,0x5F ;Posiciona o ponteiro sei ;Habilita a Interrupção Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA 10.1.5Programa Teste do Funcionamento do Sensor de Ultrasom (Parte 2) PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa Teste do Funcionamento do Sensor (Sonar) (Parte 2) Linguagem: Assembler Arquivo: Sonar.asm Objetivo: Testar o funcionamento do sensor de Ultrasom, medindo a distância entre o Sensor e um obstáculo qualquer. Descrição: Através do Pino 0 da Porta B do microcontrolador, é medido o tempo em que a saída do Sensor fica em nível alto. Esse tempo é medido e enviado pela UART para o Computador Pessoal, o qual mostra na tela do Computador Pessoal o tempo medido em decimal. .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def temp2 = r17 .def desloc = r18
- 163. 145 .def desloc1 = r19 .def desloc2 = r20 .def temp3 = r21 rjmp RESET ;Pula para o Programa Principal ;** Bloco para iniciar a transmissão dos dados ao Computador Pessoal .org UDREaddr ;UART Data Register Empty Interrupt Vector Address rjmp Enviar Enviar: inc XL ;Posiciona o ponteiro ld temp,X ;Carrega o dado na variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o ;registrador de dados da UART ldi desloc2,2 rcall Atraso ;Chama o bloco Atraso cpi XL,0x62 ;Compara para saber se o último caractere foi enviado breq DeNovo ;Pula para o bloco DeNovo (reiniciar o processo) reti ;Retorna da Interrupção ;** Bloco para parar a contagem do Timer PararCont: ldi temp,(0CS11)|(0CS10) out TCCR1B,temp ;Para o Timer in temp2,TCNT1L ;Lê o valor do byte menos significativo do registrador de 16 bits ;e armazena na variável temp2 in temp3,TCNT1H ;Lê o valor do byte mais significativo do registrador de 16 bits ;e armazena na variável temp3 ;** Armazenamento das informações a serem transmitidas ldi XL,0x60 ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp3 ;Armazena o valor do byte mais significativo do registrador de 16 bits inc XL ;Incrementa o ponteiro st X,temp2 ;Armazena o valor do byte menos significativo do registrador de 16 bits inc XL ;Incrementa o ponteiro st X,temp ;Armazena o valor 11001100b ldi XL,0x5F ;Posiciona o ponteiro clr temp ;Limpa a variável temp out TCNT1H,temp ;Limpa o registrador de 16 bits out TCNT1L,temp rjmp Transmitir ;Pula para o bloco Transmitir ;** Loop de Atraso Atraso: cli ;Desabilita a Interrupção ldi desloc,255 ldi desloc1,255 Loop: dec desloc brne loop dec desloc1 brne loop dec desloc2 brne loop ret RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0b11111110 out DDRB,temp ;Pino 0 do Port B configurado como entrada ;demais pinos configurados como saída ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela)
- 164. 146 DeNovo: clr temp out UCR,temp ;Desabilita transmissão e interrupção por transmissão ldi desloc2,6 rcall Atraso ;Chama o bloco de Atraso ;** Bloco de contagem do tempo em nível alto do pulso de saída do Sensor Verifica1: sbis PINB,0 ;Pula a próxima instrução se o pino 0 do Port B estiver em nível alto rjmp Verifica1 ;Aguarda até que o pino 0 do Port B fique em nível alto ;(caso esteja em nível baixo, para iniciar a contagem do tempo) ldi temp,(0CS11)|(1CS10) out TCCR1B,temp ;Ajuste do prescaler 1:1 (Tempo = Clock/1) Verifica2: sbis PINB,0 ;Pula a próxima instrução se o pino 0 do Port B estiver em nível alto rjmp PararCont ;Pula para o bloco PararCont assim que o pino 0 do Port B fique em ;nível baixo rjmp Verifica2 ;Aguarda até que o pino 0 do Port B fique em nível baixo ;** Bloco para configurar o início da transmissão dos dados ao Computador Pessoal Transmitir: ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão sei ;Habilitação geral das interrupções Volta: rjmp Volta ;Pula para o bloco Volta até surgir uma interrupção ;** FIM DO PROGRAMA 10.1.6Programa Teste para o Acionamento dos Motores (Transmissor) PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa para o acionamento dos motores (Parte 1) Módulo: Transmissão Linguagem: Assembler Arquivo: AcionaMT.asm Objetivo: Testar o funcionamento dos motores de acordo com o comando enviado. Descrição: Uma seqüência de 5 bytes deve ser recebida através da UART sendo: Bytes 1 e 2: CCh (Identificação de Protocolo) Byte 3: Direção dos Motores Bytes 4 a 5: Velocidade dos motores 1 e 2 respectivamente Por fim, os dados são codificados e transmitidos ao módulo de recepção utilizando-se a comunicação UART. .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def temp1 = r17 .def temp2 = r18 .def final = r19 .def count = r20 .def desloc = r21 .def desloc1 = r22 .def chave = r23 rjmp RESET ;Pula para o Programa Principal .org URXCaddr ;UART Receive Complete Interrupt Vector Address
- 165. 147 rjmp Receber .org UDREaddr ;UART Data Register Empty Interrupt Vector Address rjmp Transmitindo ;** Bloco de transmissão dos dados codificados Transmitindo: inc XL ;Posiciona o ponteiro ld temp,X ;Carrega o dado armazenado na variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o registrador de ;dados da UART out PORTB,temp ;Envia a mesma informação para o Port B cpi XL,0x68 ;Compara para saber se o último caractere foi enviado breq Atraso ;Pula para o bloco Atraso se todos os dados foram enviados reti ;Retorna da Interrupção ;** Loop de Atraso Atraso: ldi desloc,255 ldi desloc1,255 Loop: dec desloc brne loop dec desloc1 brne loop rjmp DeNovo ;Pula para o bloco DeNovo, para reiniciar o processo ;** Bloco que faz a leitura dos dados enviados pela serial do PC Receber: in temp,UDR ;Lê os dados recebidos inc count ;Incrementa a variável count cpi count,3 ;Compara a variável count com 3 brlo Confirmar ;Pula para o bloco Confirmar se count for menor que 3 rjmp Armazena ;Pula para o bloco Armazena se count for maior que 3 ;** Reconhecimento de pacote de dados válidos Confirmar: cpi temp,0xCC ;Compara a variável temp com 11001100b breq Confirmado ;Pula para o bloco Confirmado se temp for igual a CCh clr count ;Limpa a variável count se o pacote não for reconhecido reti ;Retorna da Interrupção Confirmado: reti ;Retorna da Interrupção ;** Armazenamento dos dados recebidos após identificação do pacote de dados Armazena: inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,5 ;Compara count com 5 para armazenar até 3 caracteres recebidos breq Posicionando ;Pula para codificar os dados se count for igual à 5 reti ;Retorna da Interrupção Posicionando: cli ;Desabilita a Interrupção ldi XL,0x61 ;Posiciona o ponteiro clr count ;Limpa a variável count inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado na variável temp Codificando_P1: clr temp2 ;Limpa a variável temp2 inc count ;Incrementa a variável count cpi count,4 ;Compara para saber se todos os dados foram codificados breq Transmitir ;Caso positivo pula para o bloco Transmitir andi temp,0x0F ;Codifica apenas os quatro primeiros bits (AND com 00001111b) ;** Bloco de codificação dos dados Codificando_P2: clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 com temp ;Faz o complemento da variável temp lsl temp ;Desloca os bits da variável temp para a esquerda
- 166. 148 mov desloc,temp ;Copia o valor da variável temp para a variável desloc mov desloc1,temp1 ;Copia o valor da variável temp1 para a variável desloc1 andi desloc1,0x01 ;Codifica o primeiro bit (AND com 00000001b) andi desloc,0x02 ;Codifica o primeiro bit (AND com 00000010b) add desloc,desloc1 ;Adiciona o valor da variável desloc1 à variável desloc add final,desloc ;Adiciona o valor da variável desloc à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov desloc,temp ;Copia o valor da variável temp para a variável desloc mov desloc1,temp1 ;Copia o valor da variável temp1 para a variável desloc1 andi desloc1,0x04 ;Codifica o segundo bit (AND com 00000100b) andi desloc,0x08 ;Codifica o segundo bit (AND com 00001000b) add desloc,desloc1 ;Adiciona o valor da variável desloc1 à variável desloc add final,desloc ;Adiciona o valor da variável desloc à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov desloc,temp ;Copia o valor da variável temp para a variável desloc mov desloc1,temp1 ;Copia o valor da variável temp1 para a variável desloc1 andi desloc1,0x10 ;Codifica o terceiro bit (AND com 00010000b) andi desloc,0x20 ;Codifica o terceiro bit (AND com 00100000b) add desloc,desloc1 ;Adiciona o valor da variável desloc1 à variável desloc add final,desloc ;Adiciona o valor da variável desloc à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov desloc,temp ;Copia o valor da variável temp para a variável desloc mov desloc1,temp1 ;Copia o valor da variável temp1 para a variável desloc1 andi desloc1,0x40 ;Codifica o quarto bit (AND com 01000000b) andi desloc,0x80 ;Codifica o quarto bit (AND com 10000000b) add desloc,desloc1 ;Adiciona o valor da variável desloc1 à variável desloc add final,desloc ;Adiciona o valor da variável desloc à variável final ;** Bloco de verificação se o byte inteiro foi codificado st X,final ;Armazena o dado no ponteiro inc XL ;Incrementa o ponteiro ld temp,X ;Lê os dados e armazena na variável temp cpi temp2,0x01 ;Compara se a variável temp2 é igual a 1 breq Codificando_P1 ;Pula para o bloco Codificando_P1 se o byte inteiro foi codificado andi temp,0xF0 ;Codifica apenas os quatro últimos bits (AND com 11110000b) swap temp ;Troca de posição os quatro últimos bits pelos quatro primeiros ldi temp2,0x01 ;Carrega 1 na variável temp2 rjmp Codificando_P2 ;Pula para o bloco que faz a codificação dos dados ;** Bloco de configuração para iniciar a transmissão dos dados codificados Transmitir: ldi XL,0x5E ;Posiciona o ponteiro ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão sei ;Habilita a Interrupção rjmp Volta ;Pula para o bloco Volta e fica aguardando a próxima Interrupção RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0xFF out DDRB,temp ;Port B configurada como saída ser temp out PORTB,temp ;Garante 0 inicialmente na saída ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela)
- 167. 149 ;** Armazenamento dos caracteres de reconhecimento do pacote ldi XL,0x60 ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp ;Armazena o mesmo valor na memória inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória DeNovo: cli ;Desabilita a Interrupção ldi temp,0b10010000 out UCR,temp ;Habilita recepção e interrupção por recepção completa de dados clr count ;Limpa a variável count clr temp ;Limpa a variável temp ldi XL,0x61 ;Posiciona o ponteiro sei ;Habilita a Interrupção Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA 10.1.7Programa Teste para o Acionamento dos Motores (Receptor) PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa para o acionamento dos motores (Parte 1) Módulo: Recepção Linguagem: Assembler Arquivo: AcionaMR.asm Objetivo: Testar o funcionamento dos motores de acordo com o comando enviado. Descrição: Uma seqüência de 5 bytes deve ser recebida através da UART sendo: Bytes 1 e 2: CCh (Identificação de Protocolo) Byte 3: Direção dos Motores Bytes 4 a 5: Velocidade dos motores 1 e 2 respectivamente Por fim, os dados são recebidos deverão ser decodificados. .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def temp1 = r17 .def final = r18 .def vfinal = r10 .def count = r20 .def chave = r21 .def ponteiro1 = r22 .def ponteiro2 = r23 rjmp RESET ;Pula para o Programa Principal .org URXCaddr ;UART Receive Complete Interrupt Vector Address rjmp Receber Receber: in temp,UDR ;Lê os dados recebidos inc count ;Incrementa a variável count cpi count,3 ;Compara a variável count com 3 brlo Confirmar ;Pula para o bloco Confirmar se count for menor que 3 rjmp Armazena ;Pula para o bloco Armazena se count for maior que 3 ;** Reconhecimento de pacote de dados válidos Confirmar: cpi temp,0xCC ;Compara a variável temp com 11001100b
- 168. 150 breq Confirmado ;Pula para o bloco Confirmado se temp for igual a CCh clr count ;Limpa a variável count se não for reconhecido o pacote de dados reti ;Retorna da Interrupção Confirmado: reti ;Retorna da Interrupção ;** Armazenamento dos dados recebidos após identificação do pacote Armazena: inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,8 ;Compara count com 8 para armazenar até 6 caracteres recebidos breq Converte ;Pula para decodificar os dados se count for igual à 8 reti ;Retorna da Interrupção Converte: cli ;Desabilita a Interrupção clr count ;Limpa a variável count ldi XL,0x5F ;Posiciona o ponteiro Convertendo: inc count ;Incrementa o contador inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 andi temp,0x01 ;Verifica o valor do primeiro bit (AND com 00000001b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x02 ;Verifica o valor do segundo bit (AND com 00000010b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x04 ;Verifica o valor do terceiro bit (AND com 00000100b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x08 ;Verifica o valor do quarto bit (AND com 00001000b) add final,temp ;Adiciona o valor da variável temp à variável final cpi count,1 ;Compara count com 1 para saber se apenas a primeira parte do byte ;foi decodificado breq Parte1 ;Pula para o bloco Parte 1 se verdadeiro rjmp Parte2 ;Pula para o bloco Parte 2 se já tiver sido decodificado o byte inteiro Parte1: mov vfinal,final ;Armazena a primeira parte do byte decodificado na variável vfinal rjmp Convertendo ;Pula para o bloco Convertendo para continuar com a decodificação dos dados Parte2: swap final ;Inverte a posição dos últimos bits pelos primeiros add vfinal,final ;Adiciona a segunda parte do byte decodificado à primeira parte mov ponteiro1,XL ;Armazena a posição do ponteiro na variável ponteiro1 cpi ponteiro1,0x62 ;Verifica se o primeiro byte recebido já foi decodificado e ;armazenado brsh Pula ;Pula para o bloco Pula se verdadeiro ldi XL,0x80 ;Posiciona o ponteiro mov ponteiro2,XL ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado decodificado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo Pula: inc ponteiro2 ;Posiciona o ponteiro mov XL,ponteiro2 ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado no ponteiro clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal cpi ponteiro2,0x82 ;Verifica se todos os dados recebidos foram decodificados e ;armazenados breq Aciona ;Pula para o bloco Aciona se verdadeiro mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo
- 169. 151 ;** Bloco de acionamento dos motores Aciona: ldi XL,0x80 ;Posiciona o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out PORTB,temp ;Manda para o PortB o comando de direção dos motores inc XL ;Incrementa o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out OCR1AL,temp ;Configura a velocidade do PWM A de acordo com o valor recebido inc XL ;Incrementa o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out OCR1BL,temp ;Configura a velocidade do PWM B de acordo com o valor recebido rjmp DeNovo ;Pula para o bloco DeNovo para reiniciar o processo RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0b00100000 out DDRD,temp ;Pino OC1A definido como saída demais bits do PortD configurados como entrada ldi temp,0xFF out DDRB,temp ;Port B configurada como saída ser temp out PORTB,temp ;Garante 0 inicialmente na saída ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Configuração do PWM (A e B) ldi temp,0b11110001 out TCCR1A,temp ;Configuração do modo PWM 8 bits e seleção da seguinte ação ;para os pinos OC1B e OC1A (PD5): ;Clear quando o valor de comparação atingido na contagem crescente ;Seta quando o valor de comparação atingido na contagem decrescente ;O pino OC1B é a saída PWM para o motor 2 ;O pino OC1A (PD5) é a saída PWM para o motor 1 ldi temp,0b00000001 out TCCR1B,temp ;Libera timer1, incrementado pelo clock sem prescaler ;Portanto freqüência do PWM = freqüência do clock ldi temp,0 ;Zera o conteúdo dos registradores altos out OCR1AH,temp ;Referências para o PWM out OCR1BH,temp ldi temp,255 ;Força a velocidade inicial = 0 out OCR1AL,temp out OCR1BL,temp ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) ldi temp,0b10010000 out UCR,temp ;Habilita recepção e interrupção por recepção completa de dados DeNovo: clr count ;Limpa a variável count clr temp ;Limpa a variável temp ldi XL,0x5F ;Posiciona o ponteiro sei ;Habilita a Interrupção Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA
- 170. 152 10.1.8Programa Teste para o Acionamento dos Motores PROGRAMA PARA COMPUTADOR PESSOAL Título: Programa para o acionamento dos motores (Parte 1) Linguagem: Delphi (Pascal) Arquivo: Int_v01.pas Objetivo: Testar o funcionamento dos motores de acordo com o comando enviado. Descrição: Uma seqüência de 5 bytes é enviada através da comunicação serial do PC: Bytes 1 e 2: CCh (Identificação de Protocolo) Byte 3: Direção dos Motores Bytes 4 a 5: Velocidade dos motores 1 e 2 respectivamente. unit Integ_v01; interface uses Windows, Messages, SysUtils, Classes, Graphics, Controls, Forms, Dialogs, StdCtrls, Menus, ExtCtrls, FileCtrl, Buttons, jpeg, Registry; type TMultlinha = class(TThread) private protected procedure Execute; override; procedure MostraString; //Mostra dados na tela. end; type TForm1 = class(TForm) SpeedAbrirPorta: TSpeedButton; SpeedFecharPorta: TSpeedButton; SpeedSair: TSpeedButton; Label2: TLabel; Label41: TLabel; LabelStrRecebida: TLabel; Bevel1: TBevel; ComboBoxPorta: TComboBox; Button1: TButton; Label1: TLabel; BotaoEsquerdaM12: TButton; Bevel2: TBevel; Label3: TLabel; BotaoDireitaM12: TButton; BotaoPraTrasM12: TButton; BotaoFrenteM12: TButton; BotaodeTeste: TButton; BotaoParaM12: TButton; BotaoFrenteM1: TButton; Bevel3: TBevel; Label4: TLabel; BotaoPraTrasM1: TButton; Label5: TLabel; BotaoAceleraM12: TButton; ScrollBarM12: TScrollBar; EditM12: TEdit; Memo1: TMemo; ScrollBarM1: TScrollBar; EditM1: TEdit; Bevel5: TBevel; BotaoEnviaM1: TBitBtn; BotaoEnviaM12: TBitBtn; BotaoEnviaTeste: TBitBtn; Bevel4: TBevel; BotaoFrenteM2: TButton; BotaoPraTrasM2: TButton; ScrollBarM2: TScrollBar; EditM2: TEdit; BotaoEnviaM2: TBitBtn;
- 171. 153 procedure FormCreate(Sender: TObject); procedure SpeedAbrirPortaClick(Sender: TObject); procedure SpeedSairClick(Sender: TObject); procedure SpeedFecharPortaClick(Sender: TObject); procedure FormCloseQuery(Sender: TObject; var CanClose: Boolean); procedure MostraPortasCom(); procedure Button1Click(Sender: TObject); procedure BotaodeTesteClick(Sender: TObject); procedure ScrollBarM2Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); procedure BotaoEsquerdaM12Click(Sender: TObject); procedure BotaoEnviaM12Click(Sender: TObject); procedure BotaoEnviaTesteClick(Sender: TObject); procedure BotaoEnviaM1Click(Sender: TObject); procedure BotaoEnviaM2Click(Sender: TObject); procedure BotaoFrenteM12Click(Sender: TObject); procedure BotaoDireitaM12Click(Sender: TObject); procedure BotaoPraTrasM12Click(Sender: TObject); procedure BotaoParaM12Click(Sender: TObject); procedure BotaoFrenteM1Click(Sender: TObject); procedure BotaoPraTrasM1Click(Sender: TObject); procedure BotaoFrenteM2Click(Sender: TObject); procedure BotaoPraTrasM2Click(Sender: TObject); procedure ScrollBarM1Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); procedure ScrollBarM12Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); procedure BotaoAceleraM12Click(Sender: TObject); private { Private declarations } public { Public declarations } end; const LEN_BUFFER = 100; //Tamanho dos Buffers de dados. var Form1: TForm1; hCom: THANDLE; //Handle da Porta Serial (API). dcb: TDCB; //Estrutura DCB (API). CommTimeouts: TCOMMTIMEOUTS; //Estrutura TCOMMTIMEOUTS(API). BytesLidos: DWORD; BytesEscritos: DWORD; BufferRecebe : array [0..LEN_BUFFER] of Integer; //Define o buffer. GLB_Conectado:boolean; //Indica se a porta já está aberta. GLBEnviaDados:bool; //Para habilitar/desabilitar o envio de dados pela serial. VRecebido: String; Acesso: Integer; D_Sent: array [0..90] of Byte; Implementation …(Conteúdo idêntico ao apresentado no Anexo 15.1.2)… …continuação: procedure TForm1.FormCloseQuery(Sender: TObject; var CanClose: Boolean); begin if(GLB_Conectado = true) then CloseHandle(hCom); end; procedure TForm1.Button1Click(Sender: TObject); begin Form1.Memo1.Clear end; procedure TForm1.BotaodeTesteClick(Sender: TObject); begin Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); if Acesso = 0 then begin Add('11000000b - 192d - C0h');
- 172. 154 D_Sent[3]:=192; end; if Acesso = 1 then begin Add('11000001b - 193d - C1h'); D_Sent[3]:=193; end; if Acesso = 2 then begin Add('11000010b - 194d - C2h'); D_Sent[3]:=194; end; if Acesso = 3 then begin Add('11000011b - 195d - C3h'); D_Sent[3]:=195; end; if Acesso = 4 then begin Add('11000100b - 196d - C4h'); D_Sent[3]:=196; end; if Acesso = 5 then begin Add('11000101b - 197d - C5h'); D_Sent[3]:=197; end; if Acesso = 6 then begin Add('11000110b - 198d - C6h'); D_Sent[3]:=198; end; if Acesso = 7 then begin Add('11000111b - 199d - C7h'); D_Sent[3]:=199; end; if Acesso = 8 then begin Add('11001000b - 200d - C8h'); D_Sent[3]:=200; end; if Acesso = 9 then begin Add('11001001b - 201d - C9h'); D_Sent[3]:=201; end; if Acesso = 10 then begin Add('11001010b - 202d - CAh'); D_Sent[3]:=202; end; if Acesso = 11 then begin Add('11001011b - 203d - CBh'); D_Sent[3]:=203; end; if Acesso = 12 then begin Add('11001100b - 204d - CCh'); D_Sent[3]:=204; end; if Acesso = 13 then begin Add('11001101b - 205d - CDh'); D_Sent[3]:=205; end; if Acesso = 14 then begin Add('11001110b - 206d - CEh'); D_Sent[3]:=206; end; if Acesso = 15 then begin Add('11001111b - 207d - CFh'); D_Sent[3]:=207;
- 173. 155 Acesso:=-1; end; Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[4]:=0; D_Sent[5]:=0; Acesso:=Acesso+1; End; end; procedure TForm1.BotaoEsquerdaM12Click(Sender: TObject); begin D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[3]:=200; D_Sent[4]:=0; D_Sent[5]:=0; Form1.ScrollBarM12.Position:=D_Sent[4]; Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position); Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); Add('11001000b - 200d - C8h'); Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); end; end; procedure TForm1.BotaoEnviaM12Click(Sender: TObject); begin D_Sent[4]:=Form1.ScrollBarM12.Position; D_Sent[5]:=Form1.ScrollBarM12.Position; WriteFile( hCom,D_Sent,6, BytesEscritos, nil); //Envia string. end; procedure TForm1.BotaoEnviaTesteClick(Sender: TObject); begin WriteFile( hCom,D_Sent,6, BytesEscritos, nil); //Envia string. end; procedure TForm1.BotaoEnviaM1Click(Sender: TObject); begin D_Sent[4]:=Form1.ScrollBarM1.Position; WriteFile( hCom,D_Sent,6, BytesEscritos, nil); //Envia string. end; procedure TForm1.BotaoEnviaM2Click(Sender: TObject); begin D_Sent[5]:=Form1.ScrollBarM2.Position; WriteFile( hCom,D_Sent,6, BytesEscritos, nil); //Envia string. end; procedure TForm1.BotaoFrenteM12Click(Sender: TObject); begin D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[3]:=201; D_Sent[4]:=0; D_Sent[5]:=0; Form1.ScrollBarM12.Position:=D_Sent[4]; Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position); Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); Add('11001001b - 201d - C9h'); Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); end; end;
- 174. 156 procedure TForm1.BotaoDireitaM12Click(Sender: TObject); begin D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[3]:=193; D_Sent[4]:=0; D_Sent[5]:=0; Form1.ScrollBarM12.Position:=D_Sent[4]; Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position); Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); Add('11000001b - 193d - C1h'); Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); end; end; procedure TForm1.BotaoPraTrasM12Click(Sender: TObject); begin D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[3]:=198; D_Sent[4]:=0; D_Sent[5]:=0; Form1.ScrollBarM12.Position:=D_Sent[4]; Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position); Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); Add('11000110b - 198d - C6h'); Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); end; end; procedure TForm1.BotaoParaM12Click(Sender: TObject); begin Memo1.Clear; Form1.ScrollBarM12.Position:=255; Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position); end; procedure TForm1.BotaoFrenteM1Click(Sender: TObject); begin D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[3]:=193; D_Sent[4]:=0; D_Sent[5]:=0; Form1.ScrollBarM1.Position:=D_Sent[4]; Form1.EditM1.Text:=IntToStr(Form1.ScrollBarM1.Position); Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); Add('11000001b - 193d - C1h'); Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); end; end; procedure TForm1.BotaoPraTrasM1Click(Sender: TObject); begin D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[3]:=194; D_Sent[4]:=0; D_Sent[5]:=0; Form1.ScrollBarM1.Position:=D_Sent[4]; Form1.EditM1.Text:=IntToStr(Form1.ScrollBarM1.Position);
- 175. 157 Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); Add('11000010b - 194d - C2h'); Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); end; end; procedure TForm1.BotaoFrenteM2Click(Sender: TObject); begin D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[3]:=200; D_Sent[4]:=0; D_Sent[5]:=0; Form1.ScrollBarM2.Position:=D_Sent[5]; Form1.EditM2.Text:=IntToStr(Form1.ScrollBarM2.Position); Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); Add('11001000b - 200d - C8h'); Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); end; end; procedure TForm1.BotaoPraTrasM2Click(Sender: TObject); begin D_Sent[1]:=204; D_Sent[2]:=204; D_Sent[3]:=196; D_Sent[4]:=0; D_Sent[5]:=0; Form1.ScrollBarM2.Position:=D_Sent[5]; Form1.EditM2.Text:=IntToStr(Form1.ScrollBarM2.Position); Memo1.Clear; with Memo1.Lines do begin Add('11001100b - 204d - CCh'); Add('11001100b - 204d - CCh'); Add('11000100b - 196d - C4h'); Add('00000000b - 000d - 00h'); Add('00000000b - 000d - 00h'); end; end; procedure TForm1.ScrollBarM12Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); begin Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position); end; procedure TForm1.ScrollBarM1Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); begin Form1.EditM1.Text:=IntToStr(Form1.ScrollBarM1.Position); end; procedure TForm1.ScrollBarM2Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); begin Form1.EditM2.Text:=IntToStr(Form1.ScrollBarM2.Position); end; procedure TForm1.BotaoAceleraM12Click(Sender: TObject); begin Memo1.Clear; Form1.ScrollBarM12.Position:=Form1.ScrollBarM12.Position-1; Form1.EditM12.Text:=IntToStr(Form1.ScrollBarM12.Position); D_Sent[4]:=Form1.ScrollBarM12.Position; D_Sent[5]:=Form1.ScrollBarM12.Position; end; end.
- 176. 158 //FIM DO PROGRAMA 10.1.9Programa Teste da Comunicação Bidirecional (IHM) PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa para o teste de comunicação bidirecional Módulo: IHM Linguagem: Assembler Arquivo: CBiIHM.asm Objetivo: Testar o funcionamento da comunicação bidirecional e do protocolo desenvolvido. Descrição: Parte 1: Uma seqüência de 5 bytes deve ser recebida através da UART (comunicação serial), sendo: Bytes 1 e 2: CCh (identificação do pacote de dados) Byte 3: Direção dos motores Bytes 4 e 5: Velocidade dos motores 1 e 2 respectivamente Os dados são codificados e transmitidos ao robô utilizando-se comunicação UART. Parte 2: Uma seqüência de 8 bytes deve ser recebida através da UART (módulo de recepção), sendo: Bytes 1 e 2: CCh (identificação do pacote de dados) Bytes 3 e 4: A9h e AAh (caractere decodificado = 1 em decimal) Bytes 5 e 6: A6h e AAh (caractere decodificado = 2 em decimal) Bytes 7 e 8: A5h e AAh (caractere decodificado = 3 em decimal) Por fim, os dados são decodificados e transmitidos à IHM utilizando-se a comunicação UART. .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def temp1 = r17 .def temp2 = r18 .def final = r19 .def vfinal = r20 .def count = r21 .def ponteiro1 = r22 .def ponteiro2 = r23 .def chave = r24 rjmp RESET ;Pula para o Programa Principal .org URXCaddr ;UART Receive Complete Interrupt Vector Address rjmp Receber .org UDREaddr ;UART Data Register Empty Interrupt Vector Address rjmp Transmitindo ;** Bloco de transmissão dos dados Transmitindo: inc XL ;Posiciona o ponteiro ld temp,X ;Carrega o dado armazenado na variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o registrador de ;dados da UART out PORTA,temp ;Envia a mesma informação para o Port A cpi chave,0b11111110 ;Verifica se está transmitindo para a IHM ou para o Robô breq Transmitindo_IHM ;Se for para a IHM pula para o bloco Transmitindo_IHM cpi XL,0x68 ;Compara para saber se o último caractere foi enviado breq Atraso ;Pula para o bloco Atraso se todos os dados foram enviados reti ;Retorna da Interrupção Atraso:
- 177. 159 rjmp Atraso_P1 Transmitindo_IHM: ;** Bloco de atraso, para o envio dos dados ao PC ldi ponteiro1,255 ldi ponteiro2,255 ldi temp,4 Loop2: dec ponteiro1 brne loop2 dec ponteiro2 brne loop2 dec temp brne loop2 cpi XL,0x82 ;Compara para saber se o último caractere foi enviado breq Atraso ;Pula para o bloco Atraso se todos os dados foram enviados reti ;Retorna da Interrupção ;** Bloco que faz a leitura dos dados recebidos Receber: in temp,UDR ;Lê os dados recebidos inc count ;Incrementa a variável count cpi count,3 ;Compara a variável count com 3 brlo Confirmar ;Pula para o bloco Confirmar se count for menor que 3 rjmp Armazena ;Pula para o bloco Armazena se count for maior que 3 ;** Reconhecimento de pacote de dados válidos Confirmar: cpi temp,0xCC ;Compara a variável temp com 11001100b breq Retornando ;Pula para o bloco Retornando se temp for igual a CCh clr count ;Limpa a variável count se o pacote não for reconhecido reti ;Retorna da Interrupção Retornando: reti ;Retorna da interrupção ;** Armazenamento dos dados recebidos após identificação do pacote de dados Armazena: cpi chave,0b11111101 ;Verifica se está recebendo da IHM ou do Robô breq Armazena_IHM ;Se for da IHM pula para o bloco Armazena_IHM inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,8 ;Compara count com 8 para armazenar até 6 caracteres recebidos breq Converte ;Pula para decodificar a informação recebida reti ;Retorna da Interrupção Armazena_IHM: inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,5 ;Compara count com 5 para armazenar até 3 caracteres recebidos breq Codificar ;Pula para codificar os dados se count for igual à 5 reti ;Retorna da Interrupção Codificar: rjmp Posicionando ;** Bloco que faz a decodificação dos dados recebidos Converte: cli ;Desabilita a Interrupção clr count ;Limpa a variável count ldi XL,0x61 ;Posiciona o ponteiro Convertendo: inc count ;Incrementa o contador inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 andi temp,0x01 ;Verifica o valor do primeiro bit (AND com 00000001b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1
- 178. 160 andi temp,0x02 ;Verifica o valor do segundo bit (AND com 00000010b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x04 ;Verifica o valor do terceiro bit (AND com 00000100b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x08 ;Verifica o valor do quarto bit (AND com 00001000b) add final,temp ;Adiciona o valor da variável temp à variável final cpi count,1 ;Compara count com 1 para saber se apenas a primeira parte do byte foi decodificado breq Parte1 ;Pula para o bloco Parte 1 se verdadeiro rjmp Parte2 ;Pula para o bloco Parte 2 se já tiver sido decodificado o byte inteiro Parte1: mov vfinal,final ;Armazena a primeira parte do byte decodificado na variável vfinal rjmp Convertendo ;Pula para o bloco Convertendo para continuar com a decodificação dos dados Parte2: swap final ;Inverte a posição dos últimos bits pelos primeiros add vfinal,final ;Adiciona a segunda parte do byte decodificado à primeira parte mov ponteiro1,XL ;Armazena a posição do ponteiro na variável ponteiro1 cpi ponteiro1,0x64 ;Verifica se o primeiro byte recebido já foi decodificado e ;armazenado brsh Pula ;Pula para o bloco Pula se verdadeiro ldi XL,0x80 ;Posiciona o ponteiro mov ponteiro2,XL ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado decodificado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo Pula: inc ponteiro2 ;Posiciona o ponteiro mov XL,ponteiro2 ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal cpi ponteiro2,0x82 ;Verifica se todos os dados recebidos foram decodificados e ;armazenados breq Posicionando ;Pula para o bloco Posicionando se verdadeiro mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo Retornando2: reti ;Retorna da interrupção ;** Loop de Atraso Atraso_P1: cpi chave,0b11111110 ;Verifica se já transmitiu para a IHM o dado recebido pelo robô breq Reinicio ;Pula para o bloco Reinicio em caso positivo, para reiniciar todo o ;processo inc count ;Incrementa o valor da variável count ldi XL,0x5F ;Posiciona o ponteiro cpi count,2 ;Compara para verificar se já enviou o mesmo dado 2 vezes brlo Retornando2 ;Retorna da interrupção em caso negativo ;** Bloco de atraso, para o início do recebimento dos dados do robô Atraso_P2: ldi ponteiro1,255 ldi ponteiro2,1 Loop: dec ponteiro1 brne loop dec ponteiro2 brne loop ldi chave,0b11111110 out PORTB,chave ;Seleciona a recepção com o Robô (PB0 em nível baixo) rjmp R_Robo ;Pula para o bloco R_Robo, para receber os dados do robô
- 179. 161 Reinicio: rjmp R_IHM ;Pula para o bloco R_IHM, para reiniciar todo o processo Posicionando: cli ;Desabilita a interrupção clr count ;Limpa a variável count ldi XL,0x62 ;Posiciona o ponteiro ld temp,X ;Carrega o dado na variável temp cpi chave,0b11111101 ;Verifica se a informação deve ser codificada ou não brne Transmitir ;Se não precisar codificar, ou seja, informação para a IHM, pula ;para o bloco Transmitir ;** Bloco de codificação dos dados Codificando_P1: clr temp2 ;Limpa a variável temp2 inc count ;Incrementa a variável count cpi count,4 ;Compara para saber se todos os dados foram codificados breq Transmitir ;Caso positivo pula para o bloco Transmitir andi temp,0x0F ;Codifica apenas os quatro primeiros bits (AND com 00001111b) Codificando_P2: clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 com temp ;Faz o complemento da variável temp lsl temp ;Desloca os bits da variável temp para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x01 ;Codifica o primeiro bit (AND com 00000001b) andi ponteiro1,0x02 ;Codifica o primeiro bit (AND com 00000010b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x04 ;Codifica o segundo bit (AND com 00000100b) andi ponteiro1,0x08 ;Codifica o segundo bit (AND com 00001000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x10 ;Codifica o terceiro bit (AND com 00010000b) andi ponteiro1,0x20 ;Codifica o terceiro bit (AND com 00100000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x40 ;Codifica o quarto bit (AND com 01000000b) andi ponteiro1,0x80 ;Codifica o quarto bit (AND com 10000000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final ;** Bloco de verificação se o byte inteiro foi codificado st X,final ;Armazena o dado na memória inc XL ;Incrementa o ponteiro ld temp,X ;Lê os dados e armazena na variável temp cpi temp2,0x01 ;Compara se a variável temp2 é igual a 1 breq Codificando_P1 ;Pula para o bloco Codificando_P1 se o byte inteiro foi codificado andi temp,0xF0 ;Codifica apenas os quatro últimos bits (AND com 11110000b) swap temp ;Troca de posição dos quatro últimos bits pelos quatro primeiros ldi temp2,0x01 ;Carrega 1 na variável temp2 rjmp Codificando_P2 ;Pula para o bloco que faz a codificação dos dados ;** Bloco de configuração para iniciar a transmissão dos dados Transmitir: clr count ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão
- 180. 162 cpi chave,0b11111110 ;Verifica se vai transmitir para a IHM ou para o Robô breq Transmitir_IHM ;Se for para a IHM, pula para o bloco Transmitir_IHM ldi XL,0x5D ;Posiciona o ponteiro sei ;Habilita a interrupção rjmp Volta ;Pula para o bloco Volta e fica aguardando a próxima interrupção Transmitir_IHM: ldi XL,0x7F ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp ;Armazena o mesmo valor na memória dec XL ;Posiciona o ponteiro sei ;Habilita a interrupção rjmp Volta ;Pula para o bloco Volta e fica aguardando a próxima interrupção RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0xFF out DDRB,temp ;Port B configurada como saída ldi temp,0xFF out DDRA,temp ;Port A configurada como saída ser temp out PORTA,temp ;Garante 0 inicialmente na saída (LED's) ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) ;** Armazenamento dos caracteres de reconhecimento do pacote ldi XL,0x60 ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp ;Armazena o mesmo valor na memória inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória R_IHM: ldi chave,0b11111101 out PORTB,chave ;Seleciona a recepção com a IHM (PB1 em nível baixo) R_Robo: cli ;Desabilita a interrupção ldi XL,0x61 ;Posiciona o ponteiro ldi temp,0b10010000 out UCR,temp ;Habilita recepção e interrupção por recepção completa de dados clr count ;Limpa a variável count clr temp ;Limpa a variável temp sei ;Habilita a interrupção Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA
- 181. 163 10.1.10 Programa Teste da Comunicação Bidirecional (Robô) PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa para o teste de comunicação bidirecional Módulo: Robô Linguagem: Assembler Arquivo: CBiRobo.asm Objetivo: Testar o funcionamento da comunicação bidirecional e do protocolo desenvolvido. Descrição: Parte 1: Uma seqüência de 8 bytes codificados deve ser recebida através da UART (módulo de recepção), sendo: Bytes 1 e 2: CCh (identificação do pacote de dados) Bytes 3 e 4: Direção dos motores Bytes 5 e 6: Velocidade do motor 1 Bytes 7 e 8: Velocidade do motor 2 Os dados são decodificados e os comandos executados pelo robô. Parte 2: Uma seqüência de 5 bytes deve ser transmitida ao módulo de recepção da IHM através da UART (módulo de transmissão), sendo: Bytes 1 e 2: CCh (identificação do pacote de dados) Bytes 3: 1 em decimal Bytes 4: 2 em decimal Bytes 5: 3 em decimal Por fim, os dados são codificados e transmitidos à IHM utilizando-se o módulo de transmissão RF. .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def temp1 = r17 .def temp2 = r18 .def final = r19 .def vfinal = r20 .def count = r21 .def chave = r22 .def ponteiro1 = r23 .def ponteiro2 = r24 rjmp RESET ;Pula para o Programa Principal .org URXCaddr ;UART Receive Complete Interrupt Vector Address rjmp Receber .org UDREaddr ;UART Data Register Empty Interrupt Vector Address rjmp Transmitindo ;** Bloco de transmissão dos dados codificados Transmitindo: inc XL ;Posiciona o ponteiro ld temp,X ;Carrega o dado armazenado na variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o registrador de dados da UART cpi XL,0x78 ;Compara para saber se o último caractere foi enviado breq Atraso ;Pula para o bloco Atraso se todos os dados foram enviados reti ;Retorna da interrupção Atraso: rjmp Atraso_P1 ;** Bloco que faz a leitura dos dados recebidos Receber: in temp,UDR ;Lê os dados recebidos inc count ;Incrementa a variável count
- 182. 164 cpi count,3 ;Compara a variável count com 3 brlo Confirmar ;Pula para o bloco Confirmar se count for menor que 3 rjmp Armazena ;Pula para o bloco Armazena se count for maior que 3 ;** Reconhecimento de pacote de dados válidos Confirmar: cpi temp,0xCC ;Compara a variável temp com 11001100b breq Retornando1 ;Pula para o bloco Retornando1 se temp for igual a CCh clr count ;Limpa a variável count se não for reconhecido o pacote de dados reti ;Retorna da interrupção Retornando1: reti ;Retorna da interrupção ;** Armazenamento dos dados recebidos após identificação do pacote Armazena: inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,8 ;Compara count com 8 para armazenar até 6 caracteres recebidos breq Converte ;Pula para decodificar os dados se count for igual à 8 reti ;Retorna da interrupção ;** Bloco que faz a decodificação dos dados recebidos Converte: cli ;Desabilita a interrupção clr count ;Limpa a variável count ldi XL,0x5F ;Posiciona o ponteiro Convertendo: inc count ;Incrementa o contador inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 andi temp,0x01 ;Verifica o valor do primeiro bit (AND com 00000001b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x02 ;Verifica o valor do segundo bit (AND com 00000010b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x04 ;Verifica o valor do terceiro bit (AND com 00000100b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x08 ;Verifica o valor do quarto bit (AND com 00001000b) add final,temp ;Adiciona o valor da variável temp à variável final cpi count,1 ;Compara count com 1 para saber se apenas a primeira parte do byte ;foi decodificado breq Parte1 ;Pula para o bloco Parte 1 se verdadeiro rjmp Parte2 ;Pula para o bloco Parte 2 se já tiver sido decodificado o byte inteiro Parte1: mov vfinal,final ;Armazena a primeira parte do byte decodificado na variável vfinal rjmp Convertendo ;Pula para o bloco Convertendo para continuar com a decodificação ;dos dados Parte2: swap final ;Inverte a posição dos últimos bits pelos primeiros add vfinal,final ;Adiciona a segunda parte do byte decodificado à primeira parte mov ponteiro1,XL ;Armazena a posição do ponteiro na variável ponteiro1 cpi ponteiro1,0x62 ;Verifica se o primeiro byte recebido já foi decodificado e ;armazenado brsh Pula ;Pula para o bloco Pula se verdadeiro ldi XL,0x80 ;Posiciona o ponteiro mov ponteiro2,XL ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado decodificado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo Pula:
- 183. 165 inc ponteiro2 ;Posiciona o ponteiro mov XL,ponteiro2 ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal cpi ponteiro2,0x82 ;Verifica se todos os dados recebidos foram decodificados e armazenados breq Aciona ;Pula para o bloco Aciona se verdadeiro mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo ;** Bloco de acionamento dos motores Aciona: ldi XL,0x80 ;Posiciona o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out PORTB,temp ;Manda para o PortB o comando de direção dos motores inc XL ;Incrementa o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out OCR1AL,temp ;Configura a velocidade do PWM A de acordo com o valor recebido inc XL ;Incrementa o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out OCR1BL,temp ;Configura a velocidade do PWM B de acordo com o valor recebido rjmp Leitura ;Pula para o bloco Leitura Retornando2: reti ;Retorna da interrupção ;** Loop de Atraso Atraso_P1: inc count ;Incrementa o valor da variável count ldi XL,0x6F ;Posiciona o ponteiro cpi count,10 ;Compara para verificar se já enviou o mesmo dado 10 vezes brlo Retornando2 ;Retorna da interrupção caso negativo Atraso_P2: ldi ponteiro1,255 ldi ponteiro2,1 Loop: dec ponteiro1 brne loop dec ponteiro2 brne loop rjmp DeNovo ;Pula para o bloco DeNovo para reiniciar todo o processo ;** Bloco que armazena os caracteres 1,2 e 3 na memória para serem transmitidos à IHM Leitura: cli ;Desabilita a Interrupção ldi XL,0x70 ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp ;Armazena o mesmo valor na memória inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória ldi temp,0x01 ;Armazena o valor 1 na variável temp inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória ldi temp,0x00 ;Armazena o valor 0 na variável temp inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória ldi temp,0x02 ;Armazena o valor 2 na variável temp inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória ldi temp,0x00 ;Armazena o valor 0 na variável temp inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória ldi temp,0x03 ;Armazena o valor 3 na variável temp inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória ldi temp,0x00 ;Armazena o valor 0 na variável temp inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória Posicionando: clr count ;Limpa a variável count
- 184. 166 ldi XL,0x72 ;Posiciona o ponteiro ld temp,X ;Carrega o dado na variável temp ;** Bloco de codificação dos dados Codificando_P1: clr temp2 ;Limpa a variável temp2 inc count ;Incrementa a variável count cpi count,4 ;Compara para saber se todos os dados foram codificados breq Transmitir ;Caso positivo pula para o bloco Transmitir andi temp,0x0F ;Codifica apenas os quatro primeiros bits (AND com 00001111b) Codificando_P2: clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 com temp ;Faz o complemento da variável temp lsl temp ;Desloca os bits da variável temp para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x01 ;Codifica o primeiro bit (AND com 00000001b) andi ponteiro1,0x02 ;Codifica o primeiro bit (AND com 00000010b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x04 ;Codifica o segundo bit (AND com 00000100b) andi ponteiro1,0x08 ;Codifica o segundo bit (AND com 00001000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x10 ;Codifica o terceiro bit (AND com 00010000b) andi ponteiro1,0x20 ;Codifica o terceiro bit (AND com 00100000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x40 ;Codifica o quarto bit (AND com 01000000b) andi ponteiro1,0x80 ;Codifica o quarto bit (AND com 10000000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final ;** Bloco de verificação se o byte inteiro foi codificado st X,final ;Armazena o dado na memória inc XL ;Incrementa o ponteiro ld temp,X ;Lê os dados e armazena na variável temp cpi temp2,0x01 ;Compara se a variável temp2 é igual a 1 breq Codificando_P1 ;Pula para o bloco Codificando_P1 se o byte inteiro foi codificado andi temp,0xF0 ;Codifica apenas os quatro últimos bits (AND com 11110000b) swap temp ;Troca de posição os quatro últimos bits pelos quatro primeiros ldi temp2,0x01 ;Carrega 1 na variável temp2 rjmp Codificando_P2 ;Pula para o bloco que faz a codificação dos dados ;** Bloco de configuração para iniciar a transmissão dos dados codificados Transmitir: clr count ;Limpa a variável count ldi XL,0x6D ;Posiciona o ponteiro ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão sei ;Habilita a interrupção rjmp Volta ;Pula para o bloco Volta e fica aguardando a próxima Interrupção RESET: ;** Programa Principal ;** Inicialização de Stack Pointer
- 185. 167 ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0b00100000 out DDRD,temp ;Pino OC1A definido como saída demais bits do PortD ;configurados como entrada ldi temp,0xFF out DDRB,temp ;Port B configurada como saída ser temp out PORTB,temp ;Garante 0 inicialmente na saída ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Configuração do PWM (A e B) ldi temp,0b11110001 out TCCR1A,temp ;Configuração do modo PWM 8 bits e seleção da seguinte ação para ;os pinos OC1B e OC1A (PD5): ;Clear quando o valor de comparação atingido na contagem crescente e ;seta quando o valor de comparação atingido na contagem decrescente ;O pino OC1B é a saída PWM para o motor 2 ;O pino OC1A (PD5) é a saída PWM para o motor 1 ldi temp,0b00000001 out TCCR1B,temp ;Libera timer1, incrementado pelo clock sem prescaler ;Portanto freqüência do PWM = freqüência do clock ldi temp,0 ;Zera o conteúdo dos registradores altos out OCR1AH,temp ;Referências para o PWM out OCR1BH,temp ldi temp,255 ;Força a velocidade inicial = 0 out OCR1AL,temp out OCR1BL,temp ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) DeNovo: cli ;Desabilita a interrupção ldi temp,0b10010000 out UCR,temp ;Habilita recepção e interrupção por recepção completa de dados clr count ;Limpa a variável count clr temp ;Limpa a variável temp ldi XL,0x5F ;Posiciona o ponteiro sei ;Habilita a interrupção Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA 10.1.11 Programa de Teste do Sensor de Velocidade PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa de Teste do Sensor de Velocidade Linguagem: Assembler Arquivo: S_Odo.asm Objetivo: Testar o funcionamento do Sensor de Velocidade Descrição: Quando o sensor detecta a presença de um ímã próximo, um byte é acrescido ao contador e a soma resultante é enviada pelo microcontrolador ao PC utilizando-se a UART. .include 8515def.inc
- 186. 168 ;** Declaração das Variáveis .def temp = r16 .def desloc = r17 .def desloc1 = r18 rjmp RESET ;Pula para o Programa Principal .org UDREaddr ;UART Data Register Empty Interrupt Vector Address Incremento: inc temp ;Incrementa a variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o registrador de dados da UART ;** Loop de Atraso Atraso: ldi desloc,255 ldi desloc1,255 Loop: dec desloc brne loop dec desloc1 brne loop Espera: sbis PINB,0 ;Ímã ainda sendo detectado? rjmp Espera ;Continua verificando até que o ímã deixe de ser detectado rjmp Volta RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0x00 out DDRB,temp ;Port B configurada como entrada ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) ldi temp,0b00001000 out UCR,temp ;Habilita transmissão clr temp Volta: sbis PINB,0 ;Ímã detectado? rjmp Incremento ;Sim, então desvia para incremento rjmp Volta ;Fica nesse loop até detectar um ímã ;** FIM DO PROGRAMA
- 187. 169 10.1.12 Programa de Controle do Robô PROGRAMA PARA COMPUTADOR PESSOAL Título: Programa completo para o controle do robô (última versão) Linguagem: Delphi (Pascal) Arquivo: Int_v08.pas Objetivo: Controlar o funcionamento do robô, através de uma comunicação serial, apresentando os dados medidos pelo robô e o caminho percorrido pelo mesmo. Descrição: O caminho a ser percorrido pelo robô pode ser plotado e os respectivos dados para o correto controle do robô são calculados. Uma seqüência de 7 bytes é enviada através da comunicação serial do PC com base nos resultados dos cálculos executados: Bytes 1 e 2: CCh (Identificação do Protocolo) Byte 3: Direção dos motores Bytes 4 e 5: Velocidade dos motores 1 e 2 respectivamente Bytes 6 e 7: Quantidade de detecções dos sensores de velocidade Após o envio do último byte o software fica aguardando os dados a serem enviados pelo robô: Bytes 1 e 2: CCh (Identificação do Protocolo) Bytes 3, 5, 7 e 9: Números 1, 2, 3 e 4 respectivamente Bytes 4 e 6: Quantidade de detecções dos sensores de velocidade Bytes 8 e 10: Dado medido pelo microcontrolador com base na medição do sensor de ultrasom Com base nos dados recebidos, novos cálculos são executados e os resultados obtidos são demonstrados de forma gráfica e numérica. unit Integ_v08; interface uses Windows, Messages, SysUtils, Classes, Graphics, Controls, Forms, Dialogs, StdCtrls, Menus, ExtCtrls, FileCtrl, Buttons, jpeg, Registry, Grids, TeeProcs, TeEngine, Chart, DBGrids, Math, Mask, COMobj, ComCtrls; type TMultlinha = class(TThread) private protected procedure Execute; override; procedure MostraString; //Mostra dados na tela. end; type TForm1 = class(TForm) SpeedAbrirPorta: TSpeedButton; SpeedFecharPorta: TSpeedButton; Label2: TLabel; Bevel1: TBevel; ComboBoxPorta: TComboBox; Label1: TLabel; Label3: TLabel; Memo1: TMemo; Button2: TButton; Image1: TImage; Shape1: TShape; Memo10: TMemo; Label7: TLabel; Label8: TLabel; Label9: TLabel; Memo11: TMemo; Bevel6: TBevel; SpeedLivre: TSpeedButton; SpeedElastica: TSpeedButton; SpeedButton2: TSpeedButton; Label10: TLabel;
- 188. 170 Shape2: TShape; Label6: TLabel; StringGrid1: TStringGrid; SpeedButton1: TSpeedButton; SpeedButton3: TSpeedButton; Edit1: TEdit; ScrollBar1: TScrollBar; Edit2: TEdit; Bevel7: TBevel; Label11: TLabel; SpeedButton4: TSpeedButton; SpeedButton5: TSpeedButton; Edit3: TEdit; ScrollBar2: TScrollBar; Edit4: TEdit; Label12: TLabel; Label13: TLabel; SpeedButton9: TSpeedButton; Edit6: TEdit; Label14: TLabel; Label15: TLabel; Edit7: TEdit; Edit8: TEdit; Edit9: TEdit; Label16: TLabel; Label17: TLabel; Label18: TLabel; Bevel8: TBevel; StringGrid2: TStringGrid; StringGrid3: TStringGrid; StringGrid4: TStringGrid; SpeedButton10: TSpeedButton; Label19: TLabel; Label20: TLabel; Label21: TLabel; Label22: TLabel; SpeedButton11: TSpeedButton; SpeedButton12: TSpeedButton; SpeedButton13: TSpeedButton; SpeedButton14: TSpeedButton; SpeedButton15: TSpeedButton; SpeedButton16: TSpeedButton; SpeedButton17: TSpeedButton; SpeedButton18: TSpeedButton; SpeedButton19: TSpeedButton; Edit10: TEdit; Edit11: TEdit; Edit12: TEdit; Label23: TLabel; Label24: TLabel; Edit5: TEdit; Edit13: TEdit; Label4: TLabel; Label5: TLabel; Edit14: TEdit; Label26: TLabel; Edit15: TEdit; Label27: TLabel; Label28: TLabel; Edit16: TEdit; Label29: TLabel; Edit17: TEdit; Label30: TLabel; Label31: TLabel; Label32: TLabel; Label33: TLabel; Label34: TLabel; Label35: TLabel; SpeedButton8: TSpeedButton; SpeedButton20: TSpeedButton; Label36: TLabel; Label37: TLabel; Bevel2: TBevel; Label38: TLabel; SpeedButton21: TSpeedButton; SpeedButton22: TSpeedButton;
- 189. 171 SpeedButton23: TSpeedButton; SpeedButton24: TSpeedButton; SpeedButton25: TSpeedButton; Bevel3: TBevel; Label39: TLabel; Label25: TLabel; Edit18: TEdit; Label40: TLabel; Label41: TLabel; Label42: TLabel; Label43: TLabel; Label44: TLabel; SpeedButton26: TSpeedButton; SpeedButton27: TSpeedButton; SpeedButton28: TSpeedButton; Bevel4: TBevel; Bevel5: TBevel; Bevel9: TBevel; Image2: TImage; Edit19: TEdit; Edit20: TEdit; Label45: TLabel; Label46: TLabel; Label47: TLabel; Label48: TLabel; Timer1: TTimer; StatusBar1: TStatusBar; SpeedButton6: TSpeedButton; SpeedButton29: TSpeedButton; SpeedButton30: TSpeedButton; Edit21: TEdit; Edit22: TEdit; Edit23: TEdit; Edit24: TEdit; Edit25: TEdit; Edit26: TEdit; Label49: TLabel; Label50: TLabel; Label51: TLabel; Label52: TLabel; Label53: TLabel; Bevel10: TBevel; Label54: TLabel; SpeedButton31: TSpeedButton; Edit27: TEdit; SpeedButton32: TSpeedButton; Bevel11: TBevel; Bevel12: TBevel; Label55: TLabel; SpeedButton33: TSpeedButton; Bevel13: TBevel; Label57: TLabel; SpeedButton34: TSpeedButton; SpeedButton35: TSpeedButton; SpeedButton36: TSpeedButton; SpeedButton37: TSpeedButton; SpeedButton38: TSpeedButton; SpeedButton39: TSpeedButton; SpeedButton40: TSpeedButton; Edit28: TEdit; TrackBar1: TTrackBar; Label59: TLabel; TrackBar2: TTrackBar; Label60: TLabel; SpeedButton41: TSpeedButton; SpeedButton42: TSpeedButton; Edit29: TEdit; Edit30: TEdit; Label56: TLabel; Label58: TLabel; TrackBar3: TTrackBar; TrackBar4: TTrackBar; procedure FormCreate(Sender: TObject); procedure SpeedAbrirPortaClick(Sender: TObject); procedure SpeedFecharPortaClick(Sender: TObject); procedure FormCloseQuery(Sender: TObject; var CanClose: Boolean);
- 190. 172 procedure MostraPortasCom(); procedure ScrollBar2Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); procedure ScrollBar1Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); procedure Button2Click(Sender: TObject); procedure Image1MouseMove(Sender: TObject; Shift: TShiftState; X,Y: Integer); procedure Image1Click(Sender: TObject); procedure SpeedElasticaClick(Sender: TObject); procedure SpeedLivreClick(Sender: TObject); procedure SpeedButton2Click(Sender: TObject); procedure FormActivate(Sender: TObject); procedure SpeedButton1Click(Sender: TObject); procedure SpeedButton3Click(Sender: TObject); procedure SpeedButton4Click(Sender: TObject); procedure SpeedButton5Click(Sender: TObject); procedure SpeedButton9Click(Sender: TObject); procedure FormKeyDown(Sender: TObject; var Key: Word; Shift: TShiftState); procedure SpeedButton10Click(Sender: TObject); procedure SpeedButton11Click(Sender: TObject); procedure SpeedButton12Click(Sender: TObject); procedure SpeedButton13Click(Sender: TObject); procedure SpeedButton14Click(Sender: TObject); procedure SpeedButton15Click(Sender: TObject); procedure SpeedButton16Click(Sender: TObject); procedure SpeedButton17Click(Sender: TObject); procedure SpeedButton18Click(Sender: TObject); procedure SpeedButton19Click(Sender: TObject); procedure Edit6Change(Sender: TObject); procedure SpeedButton8Click(Sender: TObject); procedure SpeedButton20Click(Sender: TObject); procedure SpeedButton21Click(Sender: TObject); procedure SpeedButton22Click(Sender: TObject); procedure SpeedButton23Click(Sender: TObject); procedure SpeedButton24Click(Sender: TObject); procedure SpeedButton25Click(Sender: TObject); procedure SpeedButton26Click(Sender: TObject); procedure SpeedButton27Click(Sender: TObject); procedure SpeedButton28Click(Sender: TObject); procedure Timer1Timer(Sender: TObject); procedure SpeedButton6Click(Sender: TObject); procedure SpeedButton29Click(Sender: TObject); procedure SpeedButton30Click(Sender: TObject); procedure SpeedButton31Click(Sender: TObject); procedure SpeedButton32Click(Sender: TObject); procedure SpeedButton33Click(Sender: TObject); procedure SpeedButton34Click(Sender: TObject); procedure SpeedButton35Click(Sender: TObject); procedure SpeedButton36Click(Sender: TObject); procedure SpeedButton37Click(Sender: TObject); procedure SpeedButton38Click(Sender: TObject); procedure SpeedButton39Click(Sender: TObject); procedure SpeedButton40Click(Sender: TObject); procedure TrackBar1Change(Sender: TObject); procedure TrackBar2Change(Sender: TObject); procedure SpeedButton41Click(Sender: TObject); procedure SpeedButton42Click(Sender: TObject); procedure TrackBar3Change(Sender: TObject); procedure TrackBar4Change(Sender: TObject); private { Private declarations } public FlagLinhaLivre, FlagLinhaElastica: String; //Variável para detectar se um botão foi pressionado. Origem, MovePt: TPoint; //Variável para armazenar pontos. end; const LEN_BUFFER = 100; //Tamanho dos Buffers de dados. Relogio = 4000000; //Relógio do sistema (4MHz). Pre_scaler = 1; //Ou seja, (1:1) acompanha o clock do sistema. var Form1: TForm1; hCom: THANDLE; //Handle da Porta Serial (API). dcb: TDCB; //Estrutura DCB (API). CommTimeouts: TCOMMTIMEOUTS; //Estrutura TCOMMTIMEOUTS(API). BytesLidos,Contador,BytesEscritos: DWORD;
- 191. 173 Hora, Min, Sec, MSec : Word; GLB_Conectado: boolean; //Indica se a porta já está aberta. GLBEnviaDados: bool; //Para habilitar/desabilitar o envio de dados pela serial. VRecebido,Condicao,TempodeEnvio,Habilita: String; Origem_dado,Confirmar_Dados_Novamente,Solicitar_Dados_Novamente: string; BufferRecebe : array [0..LEN_BUFFER] of Integer; //Define o buffer. D_Sent: array [0..90] of Byte; VRecebido_Convertido: array [0..100000] of String; Enviado_Robo: array [0..10,0..2] of Integer; Porcentagem_Ajuste: array[1..10] of real; Nd, Ne, N1, Nd_Real, Ne_Real, Nd_Aproximado, Ne_Aproximado: Integer; Acesso,Leitura,Ponteiro,c,l,X_Anterior_Real2,Y_Anterior_Real2: Integer; X_Anterior_Real,Y_Anterior_Real,X_Anterior_Aproximado,Y_Anterior_Aproximado: Integer; Nres,Lr,Desenho,Sonar,Acumulador,X_Obstaculo,Y_Obstaculo: Integer; Teta_Possivel,Nd_Possivel,Ne_Possivel: array [0..100] of Real; rd, re, Teta_Final, Menor_Diferenca,Teta_Acumulado,Teta_Acumulado2: Real; Teta,Teta_Real,Teta_Anterior,Teta_Anterior_Real,Alfa,Alfa_Anterior,X: Real; X_Anterior,X_Anterior2,Y,Y_Anterior,Y_Anterior2,Hipotenusa,Distancia: Real; Teta_Aproximado,Teta_Anterior_Aproximado,Teta_Anterior_Real2,Distancia_Obstaculo: Real; X_Real,Y_Real,X_Aproximado,Y_Aproximado,Tvoo,Timer,Vel_Som,Temp_amb: Real; Ajuste_Nd_Teta,Ajuste_Ne_Teta,Teta_Ajuste_Real,Ajuste_Linha_Reta: Real; Tempo,Tempo_Inicio,Tempo_Fim: TDateTime; implementation {$R *.DFM} //Abre a porta serial especificada. function AbrirPorta(NomePorta:String):boolean; begin hCom := CreateFile( PChar(NomePorta), GENERIC_READ or GENERIC_WRITE, 0, //Dispositivos COM abertos com acesso exclusivo. nil, //Sem atributos de segurança. OPEN_EXISTING, //deve usar OPEN_EXISTING. 0, //Entrada e saída sem overlap. 0 //Deve ser NULL para COM. ); if(hCom = INVALID_HANDLE_VALUE) then result := false //Se houve algum erro ao abrir a porta. else result:= true; end; //Define TIMEOUTs. Function ConfiguraTimeOuts:boolean; begin if not GetCommTimeouts(hCom, CommTimeouts) then result:= false; CommTimeouts.ReadIntervalTimeout := 2; CommTimeouts.ReadTotalTimeoutMultiplier := 0; CommTimeouts.ReadTotalTimeoutConstant := 2; CommTimeouts.WriteTotalTimeoutMultiplier := 5; CommTimeouts.WriteTotalTimeoutConstant := 5; if not SetCommTimeouts(hCom, CommTimeouts) then result:= false else result:= true; end; //Configura porta serial. Function ConfiguraControle:boolean; begin if not GetCommState(hCom, dcb) then result:= false; dcb.BaudRate := CBR_2400; //define velocidade em bps. dcb.ByteSize := 8; //define bits de dados. dcb.Parity := NOPARITY; //define paridade dcb.StopBits := ONESTOPBIT; //define stop bit. if not SetCommState(hCom, dcb) then result:= false else result:= true; end; //Função criada para converter um número hexadecimal para decimal. Function HexToInt(const HexStr: string): longint; var iNdx: integer; cTmp: char; begin result := 0; for iNdx := 1 to Length(HexStr) do
- 192. 174 begin cTmp := HexStr[iNdx]; case cTmp of '0'..'9': Result := 16 * Result + (Ord(cTmp) - $30); 'A'..'F': Result := 16 * Result + (Ord(cTmp) - $37); 'a'..'f': Result := 16 * Result + (Ord(cTmp) - $57); else raise EConvertError.Create('Caractere ilegal na string.'); end; end; end; //Função para calcular o tempo de execução do programa e demora no tempo de resposta do robô. Function fExecutando(N:TDateTime):String; var Tempo_final: TDateTime; begin Tempo_final := Time; if TempodeEnvio = 'True' then begin TempodeEnvio := 'False'; DecodeTime(Tempo_final-N, Hora, Min, Sec, MSec); Result := Floattostr((Msec + (Sec * 1000) + (Min * 60000) + (Hora * 3600000))/1000); end Else Result := TimeToStr(Tempo_final-N); end; //Procedimento de inicialização do programa. procedure TForm1.FormCreate(Sender: TObject); var i,j: integer; temp1,temp2,temp3,temp4,temp5,temp6: real; begin Tempo := Time; //Armazena a hora atual. //Inicializa variáveis Globais. GLB_Conectado := false; //Indica se a porta já está aberta. GLBEnviaDados := false; //Para habilitar/desabilitar o envio de dados pela porta serial. MostraPortasCom; //Carrega os nomes das portas COM num FilterComboBox. Form1.SpeedButton10.Enabled := False; Form1.SpeedButton11.Enabled := False; Form1.SpeedButton12.Enabled := False; Form1.SpeedButton13.Enabled := False; Form1.SpeedButton14.Enabled := False; Form1.SpeedButton15.Enabled := False; Form1.SpeedButton16.Enabled := False; Form1.SpeedButton17.Enabled := False; Form1.SpeedButton18.Enabled := False; Form1.SpeedButton19.Enabled := False; Form1.SpeedButton6.Enabled := False; Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Form1.SpeedElastica.Enabled := False; Form1.SpeedButton41.Click; //Chama procedimento para ajustar os valores com base nos parâmetros de ajuste do robô. end; //Procedimento de abertura da porta serial. procedure TForm1.SpeedAbrirPortaClick(Sender: TObject); var Sucesso: Boolean; begin if AbrirPorta(ComboBoxPorta.Text) = true then //Abre a porta serial. begin GLB_Conectado := true; Sucesso := ConfiguraControle(); Sucesso := ConfiguraTimeOuts(); if Sucesso = false then begin
- 193. 175 GLB_Conectado := false; CloseHandle(hCom); //Fecha a porta Serial. ShowMessage('Um outro programa já está usando a porta, ou a mesma não existe!'); end else begin Form1.Label2.Caption := ' Porta aberta:'; SpeedAbrirPorta.Enabled := false; SpeedFecharPorta.Enabled := true; ComboBoxPorta.Enabled := false; TMultlinha.Create(false); //Inicia processo. end; end else begin GLB_Conectado := false; ShowMessage('Um outro programa já está usando a porta, ou a mesma não existe!'); end; end; //Procedimento para fechar a porta serial. procedure TForm1.SpeedFecharPortaClick(Sender: TObject); begin Form1.Label2.Caption := 'Portas disponíveis:'; SpeedFecharPorta.Enabled := false; SpeedAbrirPorta.Enabled := true; ComboBoxPorta.Enabled := true; GLB_Conectado := false; CloseHandle(hCom); //Fecha a porta serial. end; //Mostra os nomes das portas COM instaladas no sistema num ComboBox. procedure TForm1.MostraPortasCom(); var Registro: TRegistry; //Para trabalhar com os Registros do windows. Lista: Tstrings; indice: Integer; //Para incrementar. begin Registro := TRegistry.Create; //Cria e aloca espaço na memória para o objeto. try Registro.RootKey := HKEY_LOCAL_MACHINE; //Define chave raiz. Registro.OpenKey('hardwaredevicemapserialcomm', False); //Abre a chave. Lista := TstringList.Create; try //Obtém uma string contendo todos os nomes de valores associados com a chave atual. Registro.GetValueNames(Lista); //Pega nos nomes das portas. for indice := 0 to Lista.Count - 1 do //Count é a quantidade de portas existentes. ComboBoxPorta.Items.Add(Registro.ReadString( Lista.Strings[indice] )); //Adiciona os nomes das portas no ComboBox1. if ComboBoxPorta.Items.Count 0 then ComboBoxPorta.ItemIndex := 0; //Para exibir o nome da porta. finally Lista.Free; end; Registro.CloseKey; finally Registro.Free; end; end; //Mostra dados de forma sincronizada. procedure TMultlinha.MostraString; var i,cont:integer; begin Ponteiro := Ponteiro + 1; VRecebido_Convertido[Ponteiro]:= VRecebido; Form1.Memo1.Text := Form1.Memo1.Text + ' ' + VRecebido; //Seqüência lógica para mostrar automaticamente os dados recebidos if Ponteiro 9 then begin If (((StrtoInt(VRecebido_Convertido[Ponteiro-3]) = 3) and (StrtoInt(VRecebido_Convertido[Ponteiro-1]) = 4) and (StrtoInt(VRecebido_Convertido[Ponteiro-5]) = 2) and (StrtoInt(VRecebido_Convertido[Ponteiro 7]) = 1) and (StrtoInt(VRecebido_Convertido[Ponteiro-8]) = 204)) or (StrtoInt(VRecebido_Convertido[Ponteiro-5]) - StrtoInt(VRecebido_Convertido[Ponteiro-7])*4 + StrtoInt(VRecebido_Convertido[Ponteiro-3]) +
- 194. 176 StrtoInt(VRecebido_Convertido[Ponteiro-1]) + StrtoInt(VRecebido_Convertido[Ponteiro-8]) = 210) or (StrtoInt(VRecebido_Convertido[Ponteiro-5]) - StrtoInt(VRecebido_Convertido[Ponteiro-7])*4 + StrtoInt(VRecebido_Convertido[Ponteiro-3]) + StrtoInt(VRecebido_Convertido[Ponteiro-1]) + StrtoInt(VRecebido_Convertido[Ponteiro-8]) = 209)) then begin //Seqüência lógica para mostrar o tempo de envio/ recebimento dos dados do robô. TempodeEnvio := 'True'; Form1.StatusBar1.Panels[2].Text:= 'Último dado recebido do robô em: '+fExecutando(Tempo_Inicio)+ 's'; Form1.StatusBar1.Panels[1].Text := 'DADO RECEBIDO'; //Seqüência para desabilitar o botão que enviou o dado. Case Desenho of 1: begin Form1.SpeedButton10.Enabled := False; Form1.SpeedButton16.Enabled := True; end; 2: begin Form1.SpeedButton16.Enabled := False; if l 2 then Form1.SpeedButton11.Enabled := True; Habilita := 'False'; end; 3: begin Form1.SpeedButton11.Enabled := False; Form1.SpeedButton17.Enabled := True; end; 4: begin Form1.SpeedButton17.Enabled := False; if l 3 then Form1.SpeedButton12.Enabled := True; Habilita := 'False'; end; 5: begin Form1.SpeedButton12.Enabled := False; Form1.SpeedButton18.Enabled := True; end; 6: begin Form1.SpeedButton18.Enabled := False; if l 4 then Form1.SpeedButton13.Enabled := True; Habilita := 'False'; end; 7: begin Form1.SpeedButton13.Enabled := False; Form1.SpeedButton19.Enabled := True; end; 8: begin Form1.SpeedButton19.Enabled := False; if l 5 then Form1.SpeedButton14.Enabled := True; Habilita := 'False'; end; 9: begin Form1.SpeedButton14.Enabled := False; Form1.SpeedButton15.Enabled := True; end; 10: begin Form1.SpeedButton15.Enabled := False; end; end; //Verifica se está apenas recebendo os dados recebidos anteriormente. if Confirmar_Dados_Novamente = 'True' then begin X_Anterior_Real := X_Anterior_Real2; Y_Anterior_Real := Y_Anterior_Real2; Teta_Anterior_Real := Teta_Anterior_Real2; Form1.Image1.Picture.LoadFromFile('C:General FilesEstudosEm desenvolvimentoImagem_Anterior.bmp'); Confirmar_Dados_Novamente := 'False'; end; if Solicitar_Dados_Novamente = 'True' then begin Form1.Image1.Picture.LoadFromFile('C:General FilesEstudosEm desenvolvimentoImagem_Atual.bmp'); Solicitar_Dados_Novamente := 'False'; end; Form1.Image1.Picture.SaveToFile('C:General FilesEstudosEm desenvolvimentoImagem_Anterior.bmp'); Form1.Button2.Click; if (Desenho 0) and (Sonar = 0) then begin Form1.StringGrid4.Cells[1,Desenho] := VRecebido_Convertido[Ponteiro-6]; Form1.StringGrid4.Cells[2,Desenho] := VRecebido_Convertido[Ponteiro-4]; Form1.Edit10.Text := VRecebido_Convertido[Ponteiro];
- 195. 177 Form1.Edit11.Text := VRecebido_Convertido[Ponteiro-2]; end; with Form1.Image1 do begin if (Desenho 0) and (Sonar = 0) and (Trunc(Desenho/2) Desenho/2) then begin Acumulador := Acumulador + 1; if StrtoInt(Form1.StringGrid1.Cells[5,Acumulador]) 0 then Nd_Real := StrtoInt(Form1.StringGrid4.Cells[1,Desenho]) else begin Nd_Real := -StrtoInt(Form1.StringGrid4.Cells[1,Desenho]); Form1.StringGrid4.Cells[1,Desenho] := '-' + Form1.StringGrid4.Cells[1,Desenho]; end; if StrtoInt(Form1.StringGrid1.Cells[6,Acumulador]) 0 then Ne_Real := StrtoInt(Form1.StringGrid4.Cells[2,Desenho]) else begin Ne_Real := -StrtoInt(Form1.StringGrid4.Cells[2,Desenho]); Form1.StringGrid4.Cells[2,Desenho] := '-' + Form1.StringGrid4.Cells[2,Desenho]; end; end; if (Desenho 0) and (Sonar = 0) and (Trunc(Desenho/2) = Desenho/2) then begin Nd_Real := StrtoInt(Form1.StringGrid4.Cells[1,Desenho]); Ne_Real := Round(StrtoInt(Form1.StringGrid4.Cells[2,Desenho])); end; if (Desenho = 0) and (Sonar = 0) then begin Nd_Real := StrtoInt(VRecebido_Convertido[Ponteiro-6]); Ne_Real := StrtoInt(VRecebido_Convertido[Ponteiro-4]); Form1.Edit10.Text := VRecebido_Convertido[Ponteiro]; Form1.Edit11.Text := VRecebido_Convertido[Ponteiro-2]; end; if Origem_dado = 'Controle dos Motores' then begin if StrtoInt(Form1.StringGrid3.Cells[1,l-1]) 0 then Nd_Real := -Nd_Real; if StrtoInt(Form1.StringGrid3.Cells[2,l-1]) 0 then Ne_Real := -Ne_Real; end; if Sonar = 0 then begin Teta_Real := ((2*PI/(Lr*Nres))*(Nd_Real*rd-Ne_Real*re))*Teta_Ajuste_Real+Teta_Anterior_Real; if (Nd_Real 0) and (Ne_Real 0) then begin //O ângulo considerado é o anterior, pois só existe desvio no final, onde o ângulo adicional é considerado X_Real := (Nd_Real*rd+Ne_Real*re)*PI*Cos(Teta_Anterior_Real)/Nres+X_Anterior_Real; Y_Real := (Nd_Real*rd+Ne_Real*re)*PI*Sin(Teta_Anterior_Real)/Nres+Y_Anterior_Real; end else begin X_Real := (Nd_Real*rd+Ne_Real*re)*PI*Cos(Teta_Real)/Nres+X_Anterior_Real; Y_Real := (Nd_Real*rd+Ne_Real*re)*PI*Sin(Teta_Real)/Nres+Y_Anterior_Real; end; //Seqüência que calcula a distância do obstáculo detectado pelo robô. Form1.Edit19.Text := InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2); Form1.Edit20.Text := InttoStr(HextoInt(InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2))); Timer := HextoInt((InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2))); Tvoo := Timer*Pre_scaler/Relogio; //Tempo de vôo em segundos. Form1.Edit12.Text := FloattoStr(Tvoo*1000); Distancia_Obstaculo := Vel_som*Tvoo*100/2; //Distância em centímetros. Form1.Edit18.Text := FloattoStr(Distancia_Obstaculo); //Seqüência que verifica em qual planilha deve ser mostrado o dado recebido. if Origem_dado = 'Controle dos Motores' then begin Form1.StringGrid3.Cells[1,l] := InttoStr(Nd_Real); Form1.StringGrid3.Cells[2,l] := InttoStr(Ne_Real); Form1.StringGrid3.Cells[3,l] := FloattoStr(Round(RadtoDeg(Teta_Real))); Form1.StringGrid3.Cells[4,l] := InttoStr(Round(Sqrt(Sqr(X_Real-X_Anterior_Real)+Sqr(Y_Real-Y_Anterior_Real)))); Form1.StringGrid3.Cells[5,l] := InttoStr(Round(Distancia_Obstaculo)); Form1.StringGrid3.Cells[6,l] := FloattoStr(Round(X_Real-X_Anterior_Real)); Form1.StringGrid3.Cells[7,l] := FloattoStr(Round(Y_Real-Y_Anterior_Real)); Form1.StringGrid3.Cells[8,l] := Condicao; end else
- 196. 178 begin Form1.StringGrid4.Cells[1,Desenho] := InttoStr(Nd_Real); Form1.StringGrid4.Cells[2,Desenho] := InttoStr(Ne_Real); Form1.StringGrid4.Cells[3,Desenho] := FloattoStr(Round(RadtoDeg(Teta_Real-Teta_Anterior_Real))); Form1.StringGrid4.Cells[4,Desenho] := FloattoStr(Round(Sqrt(Sqr(X_Real-X_Anterior_Real)+Sqr(Y_Real- Y_Anterior_Real)))); Form1.StringGrid4.Cells[5,Desenho] := InttoStr(Round(Distancia_Obstaculo)); Form1.StringGrid4.Cells[6,Desenho] := FloattoStr(Round(X_Real-X_Anterior_Real)); Form1.StringGrid4.Cells[7,Desenho] := FloattoStr(Round(Y_Real-Y_Anterior_Real)); Form1.StringGrid4.Cells[8,Desenho] := Condicao; end; //Plota o caminho percorrido pelo robô. Canvas.Pen.Width := 2; Canvas.Pen.Color := clRed; Canvas.MoveTo(X_Anterior_Real+250, -Y_Anterior_Real+500-250); Canvas.LineTo(Round(X_Real+250), Round(-Y_Real+500-250)); //desenha a nova linha X_Anterior_Real2 := X_Anterior_Real; Y_Anterior_Real2 := Y_Anterior_Real; Teta_Anterior_Real2 := Teta_Anterior_Real; X_Anterior_Real := Round(X_Real); Y_Anterior_Real := Round(Y_Real); Teta_Anterior_Real := Teta_Real; Ponteiro := 0; Origem_dado := ''; //Cálculo da posição do obstáculo no espaço X e Y. if Form1.SpeedButton29.Enabled = False then begin Teta_Acumulado2 := RadtoDeg(Teta_Real-Teta_Anterior_Real2) + Teta_Acumulado2; Teta_Acumulado := Abs(Teta_Acumulado2); X_Obstaculo := Round(Sqrt(Sqr(Distancia_Obstaculo)/(1+Sqr(Tan(Teta_Real))))); Y_Obstaculo := Round(X_Obstaculo*Tan(Teta_Real)); while Teta_Acumulado 360 do Teta_Acumulado := Teta_Acumulado - 360; if (Teta_Acumulado 180) and (Teta_Acumulado 270) then begin X_Obstaculo := -X_Obstaculo; Y_Obstaculo := -Y_Obstaculo; end; if (Teta_Acumulado 90) and (Teta_Acumulado 180) then begin X_Obstaculo := -X_Obstaculo; Y_Obstaculo := -Y_Obstaculo; end; if (Teta_Acumulado 0) and (Teta_Acumulado 90) then begin X_Obstaculo := X_Obstaculo; Y_Obstaculo := Y_Obstaculo; end; if (Teta_Acumulado 270) and (Teta_Acumulado 360) then begin X_Obstaculo := X_Obstaculo; Y_Obstaculo := Y_Obstaculo; end; Form1.Image1.Canvas.MoveTo(Round(X_Real)+250+X_Obstaculo,-Round(Y_Real)+500-250-Y_Obstaculo); Form1.Image1.Canvas.Ellipse(Round(X_Real)+250+X_Obstaculo-2,-Round(Y_Real)+500-250-Y_Obstaculo- 2,Round(X_Real)+250+X_Obstaculo+2,-Round(Y_Real)+500-250-Y_Obstaculo+2); end; Form1.Image1.Picture.SaveToFile('C:General FilesEstudosEm desenvolvimentoImagem_Atual.bmp'); end; end; if Sonar = 1 then begin Sonar := 0; Form1.Edit10.Text := VRecebido_Convertido[Ponteiro]; Form1.Edit11.Text := VRecebido_Convertido[Ponteiro-2]; //Seqüência que calcula a distância do obstáculo detectado pelo robô. Form1.Edit19.Text := InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2); Form1.Edit20.Text := InttoStr(HextoInt(InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2))); Timer := HextoInt((InttoHex(StrtoInt(Form1.Edit10.Text),2)+InttoHex(StrtoInt(Form1.Edit11.Text),2))); Tvoo := Timer*Pre_scaler/Relogio; //Tempo de vôo em segundos. Form1.Edit12.Text := FloattoStr(Tvoo*1000); Distancia_Obstaculo := Vel_som*Tvoo*100/2; //Distância em centímetros. Form1.Edit18.Text := FloattoStr(Distancia_Obstaculo); //Cálculo da posição do obstáculo no espaço X e Y. if Form1.SpeedButton29.Enabled = False then begin
- 197. 179 X_Obstaculo := Round(Sqrt(Sqr(Distancia_Obstaculo)/(1+Sqr(Tan(Teta_Real))))); Y_Obstaculo := Round(X_Obstaculo*Tan(Teta_Real)); while Teta_Acumulado 360 do Teta_Acumulado := Teta_Acumulado - 360; if (Teta_Acumulado 180) and (Teta_Acumulado 270) then begin X_Obstaculo := -X_Obstaculo; Y_Obstaculo := -Y_Obstaculo; end; if (Teta_Acumulado 90) and (Teta_Acumulado 180) then begin X_Obstaculo := -X_Obstaculo; Y_Obstaculo := -Y_Obstaculo; end; if (Teta_Acumulado 0) and (Teta_Acumulado 90) then begin X_Obstaculo := X_Obstaculo; Y_Obstaculo := Y_Obstaculo; end; if (Teta_Acumulado 270) and (Teta_Acumulado 360) then begin X_Obstaculo := X_Obstaculo; Y_Obstaculo := Y_Obstaculo; end; Form1.Image1.Canvas.MoveTo(Round(X_Real)+250+X_Obstaculo,-Round(Y_Real)+500-250-Y_Obstaculo); Form1.Image1.Canvas.Ellipse(Round(X_Real)+250+X_Obstaculo-2,-Round(Y_Real)+500-250-Y_Obstaculo- 2,Round(X_Real)+250+X_Obstaculo+2,-Round(Y_Real)+500-250-Y_Obstaculo+2); end; end; end; end; end; //Trata a porta serial. procedure TMultlinha.Execute; var cont:DWORD; StrMens:AnsiString; i, tama:integer; begin while not terminated do //loop infinito. begin if GLB_Conectado = true then //Se a porta serial foi aberta corretamente. begin BytesLidos := 0; cont := 0; if Readfile(hCom, BufferRecebe[cont], LEN_BUFFER, BytesLidos, nil) then //Lê a porta Serial. VRecebido:=IntToStr(BufferRecebe[Cont]); if BytesLidos 0 then //Se algum caracter foi lido. begin while cont BytesLidos do //Enquanto há caracteres a serem lidos. begin Synchronize(MostraString); //Mostra dados na tela. contador := contador + 1; cont := cont + 1; end; //Fim do while 2 end; end else Sleep(1); //Para não travar o processo. end; end; //Procedimento para fechar a comunicação com a porta serial. procedure TForm1.FormCloseQuery(Sender: TObject; var CanClose: Boolean); begin if(GLB_Conectado = true) then CloseHandle(hCom); end; //Procedimento para ajuste da velocidade no campo texto. procedure TForm1.ScrollBar1Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer); begin Form1.Edit2.Text:=IntToStr(Form1.ScrollBar1.Position); end; //Procedimento para ajuste da velocidade no campo texto. procedure TForm1.ScrollBar2Scroll(Sender: TObject; ScrollCode: TScrollCode; var ScrollPos: Integer);
- 198. 180 begin Form1.Edit4.Text:=IntToStr(Form1.ScrollBar2.Position); end; //Procedimento que faz a correção dos dados recebidos, caso apresentem algum erro. procedure TForm1.Button2Click(Sender: TObject); var i: Integer; begin Form1.Memo1.Clear; Ponteiro := Ponteiro - 9; Condicao := ''; if (VRecebido_Convertido[Ponteiro] = '0') or (VRecebido_Convertido[Ponteiro] = '204') then begin Condicao := 'CORRETO'; Form1.Label6.Font.Color := clLime; end; if (VRecebido_Convertido[Ponteiro] '0') and (InttoStr(StrtoInt(VRecebido_Convertido[Ponteiro + 2]) - StrtoInt(VRecebido_Convertido[Ponteiro])) = '1') then begin Condicao := 'ERRO LEITURA'; Form1.Label6.Font.Color := clRed; end; if InttoStr(StrtoInt(VRecebido_Convertido[Ponteiro + 2]) - StrtoInt(VRecebido_Convertido[Ponteiro])) = '0' then begin Condicao := 'ERRO ZERO'; Form1.Label6.Font.Color := clRed; end; if InttoStr(StrtoInt(VRecebido_Convertido[Ponteiro + 2]) - StrtoInt(VRecebido_Convertido[Ponteiro])) = '-254' then begin Condicao := 'ERRO -254'; Form1.Label6.Font.Color := clRed; end; if InttoStr(StrtoInt(VRecebido_Convertido[Ponteiro + 2]) - StrtoInt(VRecebido_Convertido[Ponteiro])) = '-203' then begin Condicao := 'ERRO -203'; Form1.Label6.Font.Color := clRed; end; Form1.Label6.Caption := Condicao; VRecebido := VRecebido_Convertido[Ponteiro]; for i:=1 to 10 do begin if Condicao = 'CORRETO' then Form1.Memo1.Text := Form1.Memo1.Text + ' ' + VRecebido_Convertido[Ponteiro]; if Condicao = 'ERRO LEITURA' then begin Form1.Memo1.Text := Form1.Memo1.Text + ' ' + InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido)); VRecebido_Convertido[Ponteiro] := InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido)); end; if Condicao = 'ERRO ZERO' then begin Form1.Memo1.Text := Form1.Memo1.Text + ' ' + InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 1); VRecebido_Convertido[Ponteiro] := InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 1); end; if Condicao = 'ERRO -254' then begin Form1.Memo1.Text := Form1.Memo1.Text + ' ' + InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 255); VRecebido_Convertido[Ponteiro] := InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 255); end; if Condicao = 'ERRO -203' then begin Form1.Memo1.Text := Form1.Memo1.Text + ' ' + InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 204); VRecebido_Convertido[Ponteiro] := InttoStr(Strtoint(VRecebido_Convertido[Ponteiro]) - Strtoint(VRecebido) + 204); end; Ponteiro := Ponteiro + 1; end; Ponteiro:= Ponteiro - 1; end; //Procedimento para desenhar o caminho na tela. procedure TForm1.Image1MouseMove(Sender: TObject; Shift: TShiftState; X,Y: Integer); begin if (FlagLinhaLivre = 'True') and (SpeedLivre.Enabled = False) then begin Canvas.MoveTo(Mouse.CursorPos.X, Mouse.CursorPos.Y-25); Canvas.LineTo(MovePt.X, MovePt.Y-25); //desenha a nova linha
- 199. 181 Form1.Memo10.Text := InttoStr(MovePt.X-286); Form1.Memo11.Text := InttoStr(500-MovePt.Y+279); MovePt := Point(Mouse.CursorPos.X, Mouse.CursorPos.Y); //memoriza as coordenadas para o próximo movimento end; if (FlagLinhaElastica = 'True') and (SpeedElastica.Enabled = False) then begin if l = 2 then begin with Form1.Image1 do begin Canvas.Pen.Width := 2; Canvas.Pen.Color := clBlue; Canvas.MoveTo(MovePt.X-286, MovePt.Y-279); Canvas.LineTo(0+250, 500-250); //desenha a nova linha end; end else begin with Form1.Image1 do begin Canvas.MoveTo(Origem.X-286, Origem.Y-279); Canvas.LineTo(MovePt.X-286, MovePt.Y-279); //desenha a nova linha end; end; Origem.X := MovePt.X; Origem.Y := MovePt.Y; Form1.Memo10.Text := InttoStr(MovePt.X-286); Form1.Memo11.Text := InttoStr(500-MovePt.Y+279); end; end; //Procedimento para desenhar o caminho na tela e calcular o dado a ser enviado ao robô. procedure TForm1.Image1Click(Sender: TObject); var i: integer; Temp: real; begin if SpeedLivre.Enabled = False then begin if (FlagLinhaLivre = '') or (FlagLinhaLivre = 'False') then FlagLinhaLivre := 'True' else FlagLinhaLivre := 'False'; MovePt := Point(Mouse.CursorPos.X, Mouse.CursorPos.Y); {memoriza as coordenadas para o próximo movimento} end else FlagLinhaLivre := 'False'; if SpeedElastica.Enabled = False then begin if (FlagLinhaElastica = '') or (FlagLinhaElastica = 'False') then begin FlagLinhaElastica := 'True'; end; MovePt := Point(Mouse.CursorPos.X, Mouse.CursorPos.Y); {memoriza as coordenadas para o próximo movimento} if Form1.SpeedButton30.Enabled = True then begin X := MovePt.X-286-250; Y := -MovePt.Y +500+279-250; end; if l = 0 then begin Teta := radtodeg(arctan((Y)/(X))); Alfa := Teta; Distancia := Sqrt(Sqr(Y)+Sqr(X)); l := l + 1; end; if l 1 then begin if (X_Anterior - X_Anterior2 0) and (X - X_Anterior 0) then begin if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := 180 + Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := -180 + Alfa - Alfa_anterior;
- 200. 182 end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := 180 + Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := -180 + Alfa - Alfa_anterior; end; end; if (X_Anterior - X_Anterior2 0) and (X - X_Anterior 0) then begin if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := -180 + Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := -180 + Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := -180 + Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := 180 + Alfa - Alfa_anterior; end; end; if ((X_Anterior - X_Anterior2 0) and (X - X_Anterior 0)) or ((X_Anterior - X_Anterior2 0) and (X - X_Anterior 0)) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := Alfa - Alfa_anterior; end; if (X_Anterior - X_Anterior2 0) and (X - X_Anterior = 0) then begin if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := 90; Teta := Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := 90; Teta := Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := -90; Teta := Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := -90; Teta := Alfa - Alfa_anterior; end; end; if (X_Anterior - X_Anterior2 0) and (X - X_Anterior = 0) then begin if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := -90; Teta := Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := -90; Teta := Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then
- 201. 183 begin Alfa := 90; Teta := Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := 90; Teta := Alfa - Alfa_anterior; end; end; if (X_Anterior - X_Anterior2 = 0) and (X - X_Anterior 0) then Begin if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := Alfa + Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := Alfa + Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := 180 + Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := -180 + Alfa - Alfa_anterior; end; if (Y_Anterior - Y_Anterior2 0) and (Y - Y_Anterior = 0) then begin Alfa := radtodeg(Arctan((Y-Y_Anterior)/(X-X_Anterior))); Teta := 90; end; end; end; //Seqüência lógica para determinar o teta possível mais próximo com base no teta calculado. Temp := 1000; for i := 1 to 56 do begin Menor_Diferenca := Teta - Teta_Possivel[i]; if Abs(Menor_Diferenca) Temp then begin Temp := Menor_Diferenca; Teta_Final := Teta_Possivel[i]; Nd := Round(Nd_Possivel[i]); Ne := Round(Ne_Possivel[i]); end; end; c := 1; with StringGrid1 Do begin Cells[c,l] := InttoStr(Round(X-X_Anterior)); c := c + 1; Cells[c,l] := InttoStr(Round(Y-Y_Anterior)); c := c + 1; Cells[c,l] := InttoStr(Round(Teta)); c := c + 1; Cells[c,l] := FloattoStr(Teta_Final); c := c + 1; Cells[c,l] := FloattoStr(Nd); c := c + 1; Cells[c,l] := FloattoStr(Ne); end; //Seqüência lógica para determinar o distância possível mais próxima com base no valor calculado. Hipotenusa := Sqrt(Sqr(X-X_Anterior)+Sqr(Y-Y_Anterior)); Temp := 1000; for i := 0 to 200 do begin Menor_Diferenca := Hipotenusa - (i/Nres)*2*Pi*rd*Ajuste_Linha_Reta; if Abs(Menor_Diferenca) Temp then begin Temp := Menor_Diferenca;
- 202. 184 Distancia := (i/Nres)*2*Pi*rd*Ajuste_Linha_Reta; if i 20 then begin Nd := Round(i*0.5); Ne := Round(i); end else begin Nd := Round(i-10); Ne := Round(i); end; end; end; c := 1; with StringGrid2 Do begin Cells[c,l] := InttoStr(0); c := c + 1; Cells[c,l] := InttoStr(Round(Hipotenusa)); c := c + 1; Cells[c,l] := InttoStr(Round(Distancia)); c := c + 1; Cells[c,l] := FloattoStr(Nd); c := c + 1; Cells[c,l] := FloattoStr(Ne); end; l := l + 1; Alfa_Anterior := Alfa; Teta_Anterior := Teta; X_Anterior2 := X_Anterior; Y_Anterior2 := Y_Anterior; X_Anterior := X; Y_Anterior := Y; end else FlagLinhaElastica := 'False'; //Seqüência lógica para habilitar o botão de envio dos dados. if l = 2 then begin Form1.SpeedButton10.Enabled := True; end; end; //Procedimento para habilitar o desenho do caminho a ser percorrido pelo robô. procedure TForm1.SpeedElasticaClick(Sender: TObject); begin SpeedLivre.Enabled := True; SpeedElastica.Enabled := False; Form1.SpeedButton30.Enabled := True; Form1.SpeedButton31.Enabled := True; Form1.SpeedButton33.Enabled := True; Form1.SpeedButton34.Enabled := True; Form1.SpeedButton35.Enabled := True; Form1.SpeedButton36.Enabled := True; Form1.SpeedButton37.Enabled := True; Form1.SpeedButton38.Enabled := True; Form1.SpeedButton39.Enabled := True; Form1.SpeedButton40.Enabled := True; c := 1; l := 0; Image1.Canvas.Pen.Width := 1; Image1.Canvas.Pen.Color := clGray; Image1.Canvas.Pen.Style := psDash; Image1.Canvas.MoveTo(250, 250); Image1.Canvas.LineTo(250,0); Image1.Canvas.MoveTo(250, 250); Image1.Canvas.LineTo(500,250); Image1.Canvas.MoveTo(0, 0); end; //Procedimento que habilita o botão para desenhar um caminho livre (apenas como teste). procedure TForm1.SpeedLivreClick(Sender: TObject); begin SpeedElastica.Enabled := True; SpeedLivre.Enabled := False; FlagLinhaElastica := 'False'; end;
- 203. 185 //Procedimento para limpar as variáveis utilizadas para o desenho gráfico. procedure TForm1.SpeedButton2Click(Sender: TObject); var i,j: Integer; begin FlagLinhaElastica := 'False'; SpeedLivre.Enabled := True; SpeedElastica.Enabled := True; c := 1; l := 0; Canvas.MoveTo(0, 0); Alfa_Anterior := 0; Teta_Anterior := 0; X_Anterior2 := 0; Y_Anterior2 := 0; X_Anterior := 0; Y_Anterior := 0; X_Real := 0; X_Anterior_Real := 0; X_Aproximado := 0; X_Anterior_Aproximado := 0; Y_Real := 0; Y_Anterior_Real := 0; Y_Aproximado := 0; Y_Anterior_Aproximado := 0; Acumulador := 0; Teta_Real := 0; Teta_Anterior_Real := 0; Teta_Aproximado := 0; Teta_Anterior_Aproximado := 0; Teta_Anterior_Real := 0; Teta_Anterior_Real2 := 0; Teta_Acumulado := 0; Teta_Acumulado2 := 0; Nd_Real := 0; Ne_Real := 0; Nd_Aproximado := 0; Ne_Aproximado := 0; Desenho := 0; Form1.Memo10.Text := ''; Form1.Memo11.Text := ''; Form1.SpeedButton10.Enabled := False; Form1.SpeedButton11.Enabled := False; Form1.SpeedButton12.Enabled := False; Form1.SpeedButton13.Enabled := False; Form1.SpeedButton14.Enabled := False; Form1.SpeedButton15.Enabled := False; Form1.SpeedButton16.Enabled := False; Form1.SpeedButton17.Enabled := False; Form1.SpeedButton18.Enabled := False; Form1.SpeedButton19.Enabled := False; //Seqüência lógica para limpar os dados que plotam o caminho aproximado. for i:= 1 to 10 do begin Enviado_Robo[Desenho,0] := 0; Enviado_Robo[Desenho,0] := 1; end; //Seqüência lógica para limpar a tela de desenho. Image1.Canvas.Brush.Color := clWhite; Image1.Canvas.Pen.Color := clWhite; Image1.Canvas.Pen.Width := 1; Image1.Canvas.Rectangle(0,0,Image1.Width,Image1.Height); //Seqüência lógica para limpar as planilhas onde se mostram os dados calculados. for i := 1 to 100 do begin for j := 1 to 8 do begin Form1.StringGrid1.Cells[j,i] := ''; Form1.StringGrid2.Cells[j,i] := ''; Form1.StringGrid3.Cells[j,i] := ''; Form1.StringGrid4.Cells[j,i] := ''; end; end; end;
- 204. 186 //Procedimento utilizado para preencher o cabeçalho das planilhas apresentadas. procedure TForm1.FormActivate(Sender: TObject); var i: Integer; begin with StringGrid1 do begin for i := 1 to 100 do Cells[0,i] := InttoStr(i); Cells[1,0] := 'Delta X'; Cells[2,0] := 'Delta. Y'; Cells[3,0] := 'Ângulo C.'; Cells[4,0] := 'Ângulo E.'; Cells[5,0] := 'Volt. M1'; Cells[6,0] := 'Volt. M2'; Cells[7,0] := ''; Cells[8,0] := 'STATUS'; end; with StringGrid2 do begin for i := 1 to 100 do Cells[0,i] := InttoStr(i); Cells[1,0] := 'Ângulo'; Cells[2,0] := 'Dist. C.'; Cells[3,0] := 'Dist. E.'; Cells[4,0] := 'Volt. M1'; Cells[5,0] := 'Volt. M2'; Cells[6,0] := ''; Cells[7,0] := ''; Cells[8,0] := 'STATUS'; end; with StringGrid4 do begin for i := 1 to 100 do Cells[0,i] := InttoStr(i); Cells[1,0] := 'Volt. M1'; Cells[2,0] := 'Volt. M2'; Cells[3,0] := 'Ângulo C.'; Cells[4,0] := 'Dist. C.'; Cells[5,0] := 'Dist. Ob.'; Cells[6,0] := 'Delta X'; Cells[7,0] := 'Delta Y'; Cells[8,0] := 'STATUS'; end; with StringGrid3 do begin for i := 1 to 100 do Cells[0,i] := InttoStr(i); Cells[1,0] := 'Volt. M1'; Cells[2,0] := 'Volt. M2'; Cells[3,0] := 'Ângulo C.'; Cells[4,0] := 'Dist. C.'; Cells[5,0] := 'Dist. Ob.'; Cells[6,0] := 'Delta X'; Cells[7,0] := 'Delta Y'; Cells[8,0] := 'STATUS'; end; end; //Procedimento para incrementar o valor de Nd. procedure TForm1.SpeedButton1Click(Sender: TObject); begin Nd := StrtoInt(Form1.Edit1.Text); Nd := Nd + 1; Form1.Edit1.Text:=IntToStr(Nd); end; //Procedimento para reduzir o valor de Nd. procedure TForm1.SpeedButton3Click(Sender: TObject); begin Nd := StrtoInt(Form1.Edit1.Text); Nd := Nd - 1; Form1.Edit1.Text:=IntToStr(Nd); end; //Procedimento para incrementar o valor de Ne. procedure TForm1.SpeedButton4Click(Sender: TObject); begin Ne := StrtoInt(Form1.Edit3.Text); Ne := Ne + 1;
- 205. 187 Form1.Edit3.Text:=IntToStr(Ne); end; //Procedimento para reduzir o valor de Ne. procedure TForm1.SpeedButton5Click(Sender: TObject); begin Ne := StrtoInt(Form1.Edit3.Text); Ne := Ne - 1; Form1.Edit3.Text:=IntToStr(Ne); end; //Procedimento utilizado para enviar comandos independentes para cada motor. procedure TForm1.SpeedButton9Click(Sender: TObject); var temp1,temp2: integer; begin Origem_dado := 'Controle dos Motores'; temp1 := StrtoInt(Form1.Edit1.Text); temp2 := StrtoInt(Form1.Edit3.Text); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (temp1 0) and (temp2 0) then D_Sent[3] := 198; if (temp1 0) and (temp2 0) then D_Sent[3] := 202; if (temp1 0) and (temp2 0) then D_Sent[3] := 197; if (temp1 0) and (temp2 0) then D_Sent[3] := 201; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[4] := Form1.ScrollBar1.Position; D_Sent[5] := Form1.ScrollBar2.Position; D_Sent[6] := Abs(temp1); D_Sent[7] := Abs(temp2); Nd := temp1; Ne := temp2; WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; //Mostra na planilha os dados enviados e calculados. Teta := ((2*PI)/(Lr*Nres))*(Nd*rd-Ne*re)+Teta_Anterior; X := (Nd*rd+Ne*re)*PI*Cos(Teta)/Nres+X_Anterior; Y := (Nd*rd+Ne*re)*PI*Sin(Teta)/Nres+Y_Anterior; l := l + 1; with StringGrid3 do begin Cells[1,l] := Inttostr(Nd); Cells[2,l] := Inttostr(Ne); Cells[3,l] := Inttostr(Round(RadtoDeg(Teta-Teta_Anterior))); Cells[4,l] := Inttostr(Round(Sqrt(Sqr(X-X_Anterior)+Sqr(Y-Y_Anterior)))); //Distância percorrida em cm. Cells[5,l] := 'NA'; Cells[6,l] := InttoStr(Round(X-X_Anterior)); Cells[7,l] := InttoStr(Round(Y-Y_Anterior)); l := l + 1; end; X_Anterior := X; Y_Anterior := Y; Teta_Anterior := Teta; end; //Procedimento para sair do programa caso a tecla esc seja pressionada. procedure TForm1.FormKeyDown(Sender: TObject; var Key: Word; Shift: TShiftState); begin if key = VK_Escape then Close(); end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton10Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 1; Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,1]); Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,1]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text);
- 206. 188 D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton11Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 3; Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,2]); Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,2]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1;
- 207. 189 Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton12Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 5; Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,3]); Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,3]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton13Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 7; Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,4]); Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,4]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end;
- 208. 190 if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton14Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 9; Temp1 := StrtoInt(Form1.StringGrid1.Cells[5,5]); Temp2 := StrtoInt(Form1.StringGrid1.Cells[6,5]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton15Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 10; Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,5]); Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,5]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin
- 209. 191 D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; //Habilita o botão para plotar o caminho aproximado. Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp'); Form1.SpeedButton8.Flat := False; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton16Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 2; Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,1]); Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,1]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados.
- 210. 192 //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; if l 2 then Habilita := 'True' else begin //Habilita o botão para plotar o caminho aproximado. Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp'); Form1.SpeedButton8.Flat := False; end; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton17Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 4; Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,2]); Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,2]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; if l 3 then Habilita := 'True' else begin //Habilita o botão para plotar o caminho aproximado. Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp'); Form1.SpeedButton8.Flat := False; end; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton18Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 6; Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,3]); Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,3]);
- 211. 193 //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; if l 4 then Habilita := 'True' else begin //Habilita o botão para plotar o caminho aproximado. Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp'); Form1.SpeedButton8.Flat := False; end; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento de envio de dados para o Robô (caminho desenhado aproximado). procedure TForm1.SpeedButton19Click(Sender: TObject); var Temp1,Temp2: Integer; begin Desenho := 8; Temp1 := StrtoInt(Form1.StringGrid2.Cells[4,4]); Temp2 := StrtoInt(Form1.StringGrid2.Cells[5,4]); //Verifica a direção dos motores com base no sinal do Nd e Ne (negativo sentido anti-horário e positivo sentido horário). if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 198; D_Sent[4] := StrtoInt(Form1.Edit26.Text); D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 202; D_Sent[4] := StrtoInt(Form1.Edit22.Text); D_Sent[5] := StrtoInt(Form1.Edit21.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 197; D_Sent[4] := StrtoInt(Form1.Edit24.Text); D_Sent[5] := StrtoInt(Form1.Edit23.Text); end; if (Temp1 0) and (Temp2 0) then begin D_Sent[3] := 201; D_Sent[4] := StrtoInt(Form1.Edit26.Text);
- 212. 194 D_Sent[5] := StrtoInt(Form1.Edit25.Text); end; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[6] := Abs(Temp1); D_Sent[7] := Abs(Temp2); WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; if l 5 then Habilita := 'True' else begin //Habilita o botão para plotar o caminho aproximado. Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 h t.bmp'); Form1.SpeedButton8.Flat := False; end; //Armazena os valores de Nd e Ne, para plotar o caminho aproximado. Enviado_Robo[Desenho,0] := Temp1; Enviado_Robo[Desenho,1] := Temp2; end; //Procedimento para atualizar a imagem do botão de sincronização dos dados. procedure TForm1.Edit6Change(Sender: TObject); begin Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp'); Form1.SpeedButton41.Flat := False; Form1.SpeedElastica.Enabled := False; end; //Procedimento utilizado para plotar o caminho aproximado realizado pelo Robô. procedure TForm1.SpeedButton8Click(Sender: TObject); var i: integer; begin Acumulador := 0; for i := 1 to Desenho do begin if (Trunc(i/2) i/2) then begin Nd_Aproximado := Round((Enviado_Robo[i,0])*Ajuste_Nd_Teta); Ne_Aproximado := Round((Enviado_Robo[i,1])*Ajuste_Ne_Teta); end else begin Nd_Aproximado := Round(Enviado_Robo[i,1]*Ajuste_Linha_Reta); Ne_Aproximado := Round(Enviado_Robo[i,1]*Ajuste_Linha_Reta); end; with Form1.Image1 do begin Teta_Aproximado := ((2*PI/(Lr*Nres))*(Nd_Aproximado*rd-Ne_Aproximado*re))+Teta_Anterior_Aproximado; X_Aproximado := (Nd_Aproximado*rd+Ne_Aproximado*re)*PI*Cos(Teta_Aproximado)/Nres+X_Anterior_Aproximado; Y_Aproximado := (Nd_Aproximado*rd+Ne_Aproximado*re)*PI*Sin(Teta_Aproximado)/Nres+Y_Anterior_Aproximado; Canvas.Pen.Width := 2; Canvas.Pen.Color := clGreen; Canvas.MoveTo(X_Anterior_Aproximado+250,-Y_Anterior_Aproximado+500-250); Canvas.LineTo(Round(X_Aproximado+250), Round(-Y_Aproximado+500-250)); {desenha a nova linha} X_Anterior_Aproximado := Round(X_Aproximado); Y_Anterior_Aproximado := Round(Y_Aproximado); Teta_Anterior_Aproximado := Teta_Aproximado; end; end; Form1.SpeedButton8.Glyph.LoadFromFile('Line Graph 16 d t.bmp'); Form1.SpeedButton8.Flat := True; //Zerando as variáveis acumulativas. Teta_Anterior_Aproximado := 0; X_Anterior_Aproximado := 0; Y_Anterior_Aproximado := 0; end; //Procedimento para plotagem do caminho percorrido pelo Robô (entrada manual). procedure TForm1.SpeedButton20Click(Sender: TObject); begin try //Exceção criada para evitar erro de conversão de caracteres. begin Desenho := Desenho + 1;
- 213. 195 with Form1.Image1 do begin Nd_Real := StrtoInt(Form1.Edit5.Text); Ne_Real := StrtoInt(Form1.Edit13.Text); Form1.StringGrid3.Cells[3,Desenho] := InttoStr(Nd_Real); Form1.StringGrid3.Cells[4,Desenho] := InttoStr(Ne_Real); Teta_Real := (2*PI/(Lr*Nres)*(Nd_Real*rd-Ne_Real*re))+Teta_Anterior_Real; Form1.StringGrid3.Cells[5,Desenho] := FloattoStr(Round(RadtoDeg(Teta_Real))); X_Real := (Nd_Real*rd+Ne_Real*re)*PI*Cos(Teta_Real)/Nres+X_Anterior_Real; Form1.StringGrid3.Cells[6,Desenho] := FloattoStr(Round(X_Real)); Y_Real := (Nd_Real*rd+Ne_Real*re)*PI*Sin(Teta_Real)/Nres+Y_Anterior_Real; Form1.StringGrid3.Cells[7,Desenho] := FloattoStr(Round(Y_Real)); Canvas.Pen.Width := 1; Canvas.Pen.Color := clGray; Canvas.Pen.Style := psDash; Canvas.MoveTo(250, 250); Canvas.LineTo(250,0); Canvas.MoveTo(250, 250); Canvas.LineTo(500,250); Canvas.MoveTo(0, 0); Canvas.Pen.Width := 2; Canvas.Pen.Color := clBlack; Canvas.MoveTo(X_Anterior_Real+250,-Y_Anterior_Real+500-250); Canvas.LineTo(Round(X_Real+250),Round(-Y_Real+500-250)); X_Anterior_Real := Round(X_Real); Y_Anterior_Real := Round(Y_Real); Teta_Anterior_Real := Teta_Real; end; end; except on EConvertError do begin MessageDlg('Não é um caractere válido, favor digitar apenas números inteiros positivos ou negativos.', mtError, [mbOK], 0); end; end; end; //Procedimento utilizado para transferir dados para o Microsoft Excel. procedure TForm1.SpeedButton21Click(Sender: TObject); var Excel :variant; i: integer; begin try Excel := CreateOleObject('excel.application'); if not Excel.Application.Visible then begin Excel.Application.Visible := true; Excel.WorkBooks.Add; Excel.Cells[1,1] := 'Teta'; Excel.Cells[1,2] := 'Nd'; Excel.Cells[1,3] := 'Ne'; for i := 1 to 74 do begin Excel.Cells[i+1,1] := Teta_Possivel[i]; Excel.Cells[i+1,2] := Nd_Possivel[i]; Excel.Cells[i+1,3] := Ne_Possivel[i]; end; end; except Showmessage('Ocorreu erro ao executar a transferência.'); end; end; //Procedimento utilizado para transferir dados para o Microsoft Excel. procedure TForm1.SpeedButton22Click(Sender: TObject); var Excel :variant; i,j: integer; begin try Excel := CreateOleObject('excel.application'); if not Excel.Application.Visible then begin Excel.Application.Visible := true; Excel.WorkBooks.Add;
- 214. 196 for i := 0 to 5 do begin for j := 0 to 8 do Excel.Cells[i+1,j+1] := Form1.StringGrid1.Cells[j,i]; end; end; except Showmessage('Ocorreu erro ao executar a transferência.'); end; end; //Procedimento utilizado para transferir dados para o Microsoft Excel. procedure TForm1.SpeedButton23Click(Sender: TObject); var Excel :variant; i,j: integer; begin try Excel := CreateOleObject('excel.application'); if not Excel.Application.Visible then begin Excel.Application.Visible := true; Excel.WorkBooks.Add; for i := 0 to 5 do begin for j := 0 to 8 do Excel.Cells[i+1,j+1] := Form1.StringGrid2.Cells[j,i]; end; end; except Showmessage('Ocorreu erro ao executar a transferência.'); end; end; //Procedimento utilizado para transferir dados para o Microsoft Excel. procedure TForm1.SpeedButton24Click(Sender: TObject); var Excel :variant; i,j: integer; begin try Excel := CreateOleObject('excel.application'); if not Excel.Application.Visible then begin Excel.Application.Visible := true; Excel.WorkBooks.Add; for i := 0 to 10 do begin for j := 0 to 8 do Excel.Cells[i+1,j+1] := Form1.StringGrid4.Cells[j,i]; end; end; except Showmessage('Ocorreu erro ao executar a transferência.'); end; end; //Procedimento utilizado para transferir dados para o Microsoft Excel. procedure TForm1.SpeedButton25Click(Sender: TObject); var Excel :variant; i,j: integer; begin try Excel := CreateOleObject('excel.application'); if not Excel.Application.Visible then begin Excel.Application.Visible := true; Excel.WorkBooks.Add; for i := 0 to 99 do begin for j := 0 to 8 do Excel.Cells[i+1,j+1] := Form1.StringGrid3.Cells[j,i]; end; end; except
- 215. 197 Showmessage('Ocorreu erro ao executar a transferência.'); end; end; //Procedimento de solicitação de leitura do sonar novamente. procedure TForm1.SpeedButton26Click(Sender: TObject); begin Sonar := 1; D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[3] := 255; D_Sent[4] := 255; D_Sent[5] := 255; D_Sent[6] := 255; D_Sent[7] := 255; WriteFile(hCom,D_Sent,8,BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; end; //Procedimento utilizado para re-enviar o último pacote de dados enviado ao robô. procedure TForm1.SpeedButton27Click(Sender: TObject); begin WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; Confirmar_Dados_Novamente := 'True'; end; //Procedimento utilizado para solicitar ao robô o re-envio do último pacote de dados já enviado. procedure TForm1.SpeedButton28Click(Sender: TObject); begin D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[3] := 0; D_Sent[4] := 0; D_Sent[5] := 0; D_Sent[6] := 0; D_Sent[7] := 0; WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; Confirmar_Dados_Novamente := 'True'; end; //Procedimento para mostrar o tempo de execução do programa. procedure TForm1.Timer1Timer(Sender: TObject); begin StatusBar1.Panels[0].Text:= ' Tempo de Execução do Programa: ' + fExecutando(Tempo); end; //Procedimento para não plotar a leitura do sonar. procedure TForm1.SpeedButton6Click(Sender: TObject); begin Form1.SpeedButton29.Enabled := True; Form1.SpeedButton6.Enabled := False; end; //Procedimento para plotar a leitura do sonar. procedure TForm1.SpeedButton29Click(Sender: TObject); begin Form1.SpeedButton6.Enabled := True; Form1.SpeedButton29.Enabled := False; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton30Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False;
- 216. 198 Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 5 do begin case j of 1: begin X := 10; Y := 40; end; 2: begin X := 30; Y := 50; end; 3: begin X := 45; Y := 40; end; 4: begin X := 30; Y := 10; end; 5: begin X := 0; Y := 0; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton31Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 5 do begin case j of 1: begin X := 45; Y := 10; end; 2: begin X := 25; Y := 20; end; 3: begin X := 45; Y := 35; end; 4: begin X := 15; Y := 45; end;
- 217. 199 5: begin X := 0; Y := 0; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento para solicitar os dados novamente ao robô. procedure TForm1.SpeedButton32Click(Sender: TObject); begin D_Sent[1] := 204; D_Sent[2] := 204; D_Sent[3] := 0; D_Sent[4] := 0; D_Sent[5] := 0; D_Sent[6] := 0; D_Sent[7] := 0; WriteFile(hCom,D_Sent,8, BytesEscritos, nil); //Envia os dados. //Inicia a contagem do tempo de envio / recebimento dos dados do robô. Tempo_Inicio := Time; Form1.StatusBar1.Panels[1].Text := 'DADO ENVIADO'; Solicitar_Dados_Novamente := 'True'; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton33Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 3 do begin case j of 1: begin X := 28; Y := 30; end; 2: begin X := 50; Y := 15; end; 3: begin X := 83; Y := 41; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton34Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False;
- 218. 200 Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 3 do begin case j of 1: begin X := 55; Y := 20; end; 2: begin X := 30; Y := 45; end; 3: begin X := 0; Y := 0; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton35Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 4 do begin case j of 1: begin X := 50; Y := 20; end; 2: begin X := 40; Y := 60; end; 3: begin X := -10; Y := 40; end; 4: begin X := 0; Y := 0; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end;
- 219. 201 //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton36Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 5 do begin case j of 1: begin X := 10; Y := 25; end; 2: begin X := 30; Y := 35; end; 3: begin X := 40; Y := 20; end; 4: begin X := 20; Y := 15; end; 5: begin X := 25; Y := 0; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton37Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 5 do begin case j of 1: begin X := 40; Y := 10; end; 2: begin X := 45; Y := 30;
- 220. 202 end; 3: begin X := 25; Y := 40; end; 4: begin X := 45; Y := 55; end; 5: begin X := 75; Y := 45; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton38Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 5 do begin case j of 1: begin X := 10; Y := 35; end; 2: begin X := 25; Y := 25; end; 3: begin X := 35; Y := 45; end; 4: begin X := 50; Y := 30; end; 5: begin X := 40; Y := 5; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton39Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False;
- 221. 203 Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 5 do begin case j of 1: begin X := 20; Y := 20; end; 2: begin X := 40; Y := 0; end; 3: begin X := 40; Y := 40; end; 4: begin X := 0; Y := 40; end; 5: begin X := 0; Y := 0; end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento para desenhar um caminho já conhecido. procedure TForm1.SpeedButton40Click(Sender: TObject); var j: integer; begin Form1.SpeedButton30.Enabled := False; Form1.SpeedButton31.Enabled := False; Form1.SpeedButton33.Enabled := False; Form1.SpeedButton34.Enabled := False; Form1.SpeedButton35.Enabled := False; Form1.SpeedButton36.Enabled := False; Form1.SpeedButton37.Enabled := False; Form1.SpeedButton38.Enabled := False; Form1.SpeedButton39.Enabled := False; Form1.SpeedButton40.Enabled := False; Image1.Canvas.Pen.Width := 2; Image1.Canvas.Pen.Color := clGray; for j := 1 to 4 do begin case j of 1: begin X := 40; Y := 15; end; 2: begin X := 25; Y := 30; end; 3: begin X := 15; Y := -15; end; 4: begin X := 0; Y := 0;
- 222. 204 end; end; Form1.Image1Click(Sender); Form1.Image1.Canvas.MoveTo(Round(250+X_Anterior2),Round(250-Y_Anterior2)); Form1.Image1.Canvas.LineTo(Round(250+X),Round(250-Y)); end; Form1.SpeedElastica.Enabled := True; end; //Procedimento de ajuste do valor de Nd. procedure TForm1.TrackBar1Change(Sender: TObject); begin Form1.Edit27.Text := FloattoStr((Form1.TrackBar1.Position)/100); Ajuste_Nd_Teta := StrtoFloat(Form1.Edit27.Text); Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp'); Form1.SpeedButton41.Flat := False; Form1.SpeedElastica.Enabled := False; end; //Procedimento de ajuste do valor de Ne. procedure TForm1.TrackBar2Change(Sender: TObject); begin Form1.Edit28.Text := FloattoStr((Form1.TrackBar2.Position)/100); Ajuste_Ne_Teta := StrtoFloat(Form1.Edit28.Text); Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp'); Form1.SpeedButton41.Flat := False; Form1.SpeedElastica.Enabled := False; end; //Procedimento utilizado para atualizar os valores com base nos parâmetros de ajuste do robô. procedure TForm1.SpeedButton41Click(Sender: TObject); var i,j,k: integer; temp1,temp2,temp3,temp4,temp5,temp6: real; begin try //Exceção criada para evitar erro de conversão de caracteres. begin Nres := StrtoInt(Form1.Edit6.Text); //Resolução dos sensores, que é o número de pulsos lidos em uma revolução das rodas. rd := StrtoFloat(Form1.Edit7.Text); //Raio da roda direita. re := StrtoFloat(Form1.Edit8.Text); //Raio da roda esquerda. Lr := StrtoInt(Form1.Edit9.Text); //Comprimento do eixo do robô. Temp_amb := (StrtoInt(Form1.Edit17.Text)) + 273.15; //Temperatura ambiente em graus Kelvin. Vel_Som := 331.4*Sqrt(Temp_amb/273); Form1.Edit16.Text := InttoStr(Round(Vel_Som)); Ajuste_Nd_Teta := StrtoFloat(Form1.Edit27.Text); Ajuste_Ne_Teta := StrtoFloat(Form1.Edit28.Text); Teta_Ajuste_Real := StrtoFloat(Form1.Edit29.Text); Ajuste_Linha_Reta := StrtoFloat(Form1.Edit30.Text); //Armazena os valores de ângulos possíveis com base no Nres. for i := 1 to 28 do begin Nd := i; Ne := -1; Teta_Possivel[i] := Round((RadtoDeg((2*PI/(Lr*Nres))*(Nd*rd-Ne*re)))*Ajuste_Nd_Teta); if Abs(Teta_Possivel[i]) = 180 then begin Nd_Possivel[i] := i; Ne_Possivel[i] := -1; end else begin Nd_Possivel[i] := 0; Ne_Possivel[i] := 0; Teta_Possivel[i] := 0; end; //Seqüência lógica necessária, caso os ângulos calculados, sejam maiores do que 360 graus. //while Teta_Possivel[i] 360 do Teta_Possivel[i] := Teta_Possivel[i] - 360; end; //Armazena os valores de ângulos possíveis com base no Nres. for i := 29 to 56 do begin Nd := -1; Ne := i-28; Teta_Possivel[i] := Round((RadtoDeg((2*PI/(Lr*Nres))*(Nd*rd-Ne*re)))*Ajuste_Ne_Teta); if Abs(Teta_Possivel[i]) = 180 then begin
- 223. 205 Nd_Possivel[i] := -1; Ne_Possivel[i] := i-28; end else begin Nd_Possivel[i] := 0; Ne_Possivel[i] := 0; Teta_Possivel[i] := 0; end; //Seqüência lógica necessária, caso os ângulos calculados, sejam maiores do que 360 graus. //while Teta_Possivel[i] 360 do Teta_Possivel[i] := Teta_Possivel[i] - 360; end; //Ordena os ângulos possíveis de forma ascendente. for i := 1 to 56 do begin for j := i+1 to 56 do begin if (Teta_Possivel[i] Teta_Possivel[j]) and (Teta_Possivel[i] Temp2) then begin temp1 := Teta_Possivel[i]; temp3 := Nd_Possivel[i]; temp5 := Ne_Possivel[i]; Teta_Possivel[i] := Teta_Possivel[j]; Nd_Possivel[i] := Nd_Possivel[j]; Ne_Possivel[i] := Ne_Possivel[j]; Teta_Possivel[j] := temp1; Nd_Possivel[j] := temp3; Ne_Possivel[j] := temp5; end; end; temp2 := Teta_Possivel[i]; temp4 := Nd_Possivel[i]; temp6 := Ne_Possivel[i]; end; k := 0; for i := 1 to 56 do begin if Teta_Possivel[i] 0 then begin k := k + 1; Teta_Possivel[k] := Teta_Possivel[i]; Nd_Possivel[k] := Nd_Possivel[i]; Ne_Possivel[k] := Ne_Possivel[i]; end; end; //Zera a variável VRecebido_Convertido. for i := 1 to 100000 do VRecebido_Convertido[i] := '0'; //Atualiza o padrão do botão de atualização dos parâmetros do Robô. Form1.SpeedButton41.Glyph.LoadFromFile('connect16_d.bmp'); Form1.SpeedButton41.Flat := True; Form1.SpeedElastica.Enabled := True; end; except on EConvertError do begin MessageDlg('Não é um caractere válido, favor digitar apenas números positivos.', mtError, [mbOK], 0); end; end; end; //Seqüência lógica utilizada para listar os pulsos vs as distâncias equivalentes. procedure TForm1.SpeedButton42Click(Sender: TObject); var i: integer; begin for i := 0 to 15 do begin Distancia := (i/Nres)*2*Pi*rd*Ajuste_Linha_Reta; if i 20 then begin Nd := Round(i*0.5); Ne := Round(i); end else begin Nd := Round(i-10);
- 224. 206 Ne := Round(i); end; Form1.StringGrid3.Cells[1,i+1] := InttoStr(Round(Distancia)); Form1.StringGrid3.Cells[2,i+1] := InttoStr(Round(Nd)); Form1.StringGrid3.Cells[3,i+1] := InttoStr(Round(Ne)); end; end; //Procedimento para ajuste do valor de teta real. procedure TForm1.TrackBar3Change(Sender: TObject); begin Form1.Edit29.Text := FloattoStr((Form1.TrackBar3.Position)/100); Teta_Ajuste_Real := StrtoFloat(Form1.Edit29.Text); Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp'); Form1.SpeedButton41.Flat := False; Form1.SpeedElastica.Enabled := False; end; //Procedimento para ajuste do cálculo da linha reta. procedure TForm1.TrackBar4Change(Sender: TObject); begin Form1.Edit30.Text := FloattoStr((Form1.TrackBar4.Position)/100); Ajuste_Linha_Reta := StrtoFloat(Form1.Edit30.Text); Form1.SpeedButton41.Glyph.LoadFromFile('disconnect16_h.bmp'); Form1.SpeedButton41.Flat := False; Form1.SpeedElastica.Enabled := False; end; end. //FIM DO PROGRAMA
- 225. 207 10.1.13 Programa Completo do Circuito de IHM PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa completo do circuito de IHM (última versão) Módulo: IHM Linguagem: Assembler Arquivo: FIHM_v04.asm Objetivo: Testar o funcionamento completo do circuito de IHM. Descrição: Parte 1 (Recepção por meio de comunicação serial): Uma seqüência de 7 bytes deve ser recebida do PC através da UART, sendo: Bytes 1 e 2: CCh (identificação do pacote de dados) Byte 3: Direção dos motores Byte 4: Velocidade do motor 2 (esquerdo) Byte 5: Velocidade do motor 1 (direito) Byte 6: Número de pulsos detectados pelo sensor do motor 1 Byte 7: Número de pulsos detectados pelo sensor do motor 2 Os dados são codificados e enviados para o robô por meio de RF. Parte 2 (Recepção por meio de RF): Uma seqüência de 10 bytes deve ser transmitida pelo robô por meio de RF e recebida pelo módulo de IHM através da UART, sendo: Bytes 1 e 2: CCh (identificação do pacote de dados) Bytes 3 e 4: Quantidade de rotações do Motor 1 Bytes 5 e 6: Quantidade de rotações do Motor 2 Bytes 7 e 8: Tempo de vôo que a onda leva para retornar ao sensor, registrador de 16 bits (TCNT1H) Bytes 9 e 10: Tempo de vôo que a onda leva para retornar ao sensor, registrador de 16 bits (TCNT1L) Por fim, os dados são decodificados e transmitidos ao PC utilizando-se a comunicação serial. .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def temp1 = r17 .def temp2 = r18 .def final = r19 .def vfinal = r20 .def count = r21 .def ponteiro1 = r22 .def ponteiro2 = r23 .def chave = r24 .def count2 = r25 rjmp RESET ;Pula para o Programa Principal .org URXCaddr ;UART Receive Complete Interrupt Vector Address rjmp Receber .org UDREaddr ;UART Data Register Empty Interrupt Vector Address rjmp Transmitindo ;** Bloco de transmissão dos dados Transmitindo: inc XL ;Posiciona o ponteiro ld temp,X ;Carrega o dado armazenado na variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o registrador de dados da UART out PORTA,temp ;Envia a mesma informação para o Port A cpi chave,0b11111110 ;Verifica se está transmitindo para a IHM ou para o Robô breq Transmitindo_IHM ;Se for para a IHM pula para o bloco Transmitindo_IHM cpi XL,0x6D ;Compara para saber se o último caractere foi enviado breq Atraso ;Pula para o bloco Atraso se todos os dados foram enviados reti ;Retorna da Interrupção
- 226. 208 Atraso: rjmp Atraso_P1 ;Pula para o bloco Atraso_P1 Transmitindo_IHM: ;** Bloco de atraso, para o envio dos dados ao PC ldi ponteiro1,255 ;Carrega o valor 255 na variável ponteiro1 ldi ponteiro2,255 ;Carrega o valor 255 na variável ponteiro2 ldi temp,2 ;Carrega o valor 2 na variável temp Loop2: dec ponteiro1 ;Decrementa a variável ponteiro1 brne Loop2 ;Pula para Loop2 se ponteiro1 for diferente de zero dec ponteiro2 ;Decrementa a variável ponteiro2 brne Loop2 ;Pula para Loop2 se ponteiro2 for diferente de zero dec temp ;Decrementa a variável temp brne Loop2 ;Pula para Loop2 se temp for diferente de zero cpi XL,0x87 ;Compara para saber se o último caractere foi enviado breq Atraso ;Pula para o bloco Atraso se todos os dados foram enviados reti ;Retorna da Interrupção ;** Bloco que faz a leitura dos dados recebidos Receber: in temp,UDR ;Lê os dados recebidos inc count ;Incrementa a variável count cpi count,3 ;Compara a variável count com 3 brlo Confirmar ;Pula para o bloco Confirmar se count for menor que 3 rjmp Armazena ;Pula para o bloco Armazena se count for maior que 3 ;** Reconhecimento de pacote de dados válidos Confirmar: cpi temp,0xCC ;Compara a variável temp com 11001100b breq Retornando ;Pula para o bloco Retornando se temp for igual a CCh clr count ;Limpa a variável count se o pacote não for reconhecido reti ;Retorna da interrupção Retornando: reti ;Retorna da interrupção ;** Armazenamento dos dados recebidos após identificação do pacote de dados Armazena: cpi chave,0b11111101 ;Verifica se está recebendo da IHM ou do Robô breq Armazena_IHM ;Se for da IHM pula para o bloco Armazena_IHM inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,0x0A ;Compara count com 10 para armazenar até 8 caracteres recebidos breq Converte ;Pula para decodificar a informação recebida reti ;Retorna da Interrupção Armazena_IHM: inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,7 ;Compara count com 7 para armazenar até 5 caracteres recebidos breq Codificar ;Pula para codificar os dados se count for igual à 7 reti ;Retorna da Interrupção Codificar: rjmp Posicionando ;** Bloco que faz a decodificação dos dados recebidos Converte: cli ;Desabilita a Interrupção clr count ;Limpa a variável count ldi XL,0x61 ;Posiciona o ponteiro Convertendo: inc count ;Incrementa o contador inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 andi temp,0x01 ;Verifica o valor do primeiro bit (AND com 00000001b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x02 ;Verifica o valor do segundo bit (AND com 00000010b)
- 227. 209 add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x04 ;Verifica o valor do terceiro bit (AND com 00000100b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x08 ;Verifica o valor do quarto bit (AND com 00001000b) add final,temp ;Adiciona o valor da variável temp à variável final cpi count,1 ;Compara count com 1 para saber se apenas a primeira parte do byte foi decodificado breq Parte1 ;Pula para o bloco Parte 1 se verdadeiro rjmp Parte2 ;Pula para o bloco Parte 2 se já tiver sido decodificado o byte inteiro Parte1: mov vfinal,final ;Armazena a primeira parte do byte decodificado na variável vfinal rjmp Convertendo ;Pula para o bloco Convertendo para continuar com a decodificação dos dados Parte2: swap final ;Inverte a posição dos últimos bits pelos primeiros add vfinal,final ;Adiciona a segunda parte do byte decodificado à primeira parte mov ponteiro1,XL ;Armazena a posição do ponteiro na variável ponteiro1 cpi ponteiro1,0x64 ;Verifica se o primeiro byte recebido já foi decodificado e armazenado brsh Pula ;Pula para o bloco Pula se verdadeiro ldi XL,0x80 ;Posiciona o ponteiro mov ponteiro2,XL ;Armazena o valor do ponteiro na variável ponteiro2 inc count2 st X,count2 ;Armazena 1,2,3 ou 4 inc XL ;Incrementa o ponteiro mov ponteiro2,XL ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado decodificado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo Pula: inc ponteiro2 ;Posiciona o ponteiro mov XL,ponteiro2 ;Armazena o valor do ponteiro na variável ponteiro2 inc count2 st X,count2 ;Armazena 1,2,3 ou 4 inc ponteiro2 ;Posiciona o ponteiro mov XL,ponteiro2 ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal cpi ponteiro2,0x87 ;Verifica se todos os dados recebidos foram decodificados e armazenados breq Posicionando ;Pula para o bloco Posicionando se verdadeiro mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo Retornando2: reti ;Retorna da interrupção ;** Loop de Atraso Atraso_P1: cpi chave,0b11111110 ;Verifica se já transmitiu para a IHM o dado recebido pelo robô breq Reinicio ;Pula para o bloco Reinicio em caso positivo, para reiniciar todo o processo inc count ;Incrementa o valor da variável count ldi XL,0x5F ;Posiciona o ponteiro cpi count,10 ;Compara para verificar se já enviou o mesmo dado 10 vezes brlo Retornando2 ;Retorna da interrupção em caso negativo ;** Bloco de atraso, para o início do recebimento dos dados do robô Atraso_P2: ldi ponteiro1,255 ;Carrega 255 na variável ponteiro1 ldi ponteiro2,1 ;Carrega 1 na variável ponteiro2 Loop: dec ponteiro1 ;Decrementa a variável ponteiro1 brne Loop ;Pula para Loop se ponteiro1 for diferente de zero dec ponteiro2 ;Decrementa a variável ponteiro2 brne Loop ;Pula para Loop se ponteiro2 for diferente de zero ldi chave,0b11111110 out PORTB,chave ;Seleciona a recepção com o Robô (PB0 em nível baixo) rjmp R_Robo ;Pula para o bloco R_Robo, para receber os dados do robô Reinicio:
- 228. 210 rjmp R_IHM ;Pula para o bloco R_IHM, para reiniciar todo o processo Posicionando: cli ;Desabilita a interrupção clr count ;Limpa a variável count ldi XL,0x62 ;Posiciona o ponteiro ld temp,X ;Carrega o dado na variável temp cpi chave,0b11111101 ;Verifica se a informação deve ser codificada ou não brne Transmitir ;Se não precisar codificar, ou seja, informação para a IHM, ;pula para o bloco Transmitir ;** Bloco de codificação dos dados Codificando_P1: clr temp2 ;Limpa a variável temp2 inc count ;Incrementa a variável count cpi count,6 ;Compara para saber se todos os dados foram codificados breq Transmitir ;Caso positivo pula para o bloco Transmitir andi temp,0x0F ;Codifica apenas os quatro primeiros bits (AND com 00001111b) Codificando_P2: clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 com temp ;Faz o complemento da variável temp lsl temp ;Desloca os bits da variável temp para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x01 ;Codifica o primeiro bit (AND com 00000001b) andi ponteiro1,0x02 ;Codifica o primeiro bit (AND com 00000010b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x04 ;Codifica o segundo bit (AND com 00000100b) andi ponteiro1,0x08 ;Codifica o segundo bit (AND com 00001000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x10 ;Codifica o terceiro bit (AND com 00010000b) andi ponteiro1,0x20 ;Codifica o terceiro bit (AND com 00100000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x40 ;Codifica o quarto bit (AND com 01000000b) andi ponteiro1,0x80 ;Codifica o quarto bit (AND com 10000000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final ;** Bloco de verificação se o byte inteiro foi codificado st X,final ;Armazena o dado na memória inc XL ;Incrementa o ponteiro ld temp,X ;Lê os dados e armazena na variável temp cpi temp2,0x01 ;Compara se a variável temp2 é igual a 1 breq Codificando_P1 ;Pula para o bloco Codificando_P1 se o byte inteiro foi codificado andi temp,0xF0 ;Codifica apenas os quatro últimos bits (AND com 11110000b) swap temp ;Troca de posição dos quatro últimos bits pelos quatro primeiros ldi temp2,0x01 ;Carrega 1 na variável temp2 rjmp Codificando_P2 ;Pula para o bloco que faz a codificação dos dados ;** Bloco de configuração para iniciar a transmissão dos dados Transmitir: clr count ;Limpa a variável count ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão cpi chave,0b11111110 ;Verifica se vai transmitir para a IHM ou para o Robô breq Transmitir_IHM ;Se for para a IHM, pula para o bloco Transmitir_IHM
- 229. 211 ldi XL,0x5D ;Posiciona o ponteiro sei ;Habilita a interrupção rjmp Volta ;Pula para o bloco Volta e fica aguardando a próxima interrupção Transmitir_IHM: ldi XL,0x7F ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp ;Armazena o mesmo valor na memória dec XL ;Posiciona o ponteiro sei ;Habilita a interrupção rjmp Volta ;Pula para o bloco Volta e fica aguardando a próxima interrupção RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0xFF out DDRB,temp ;Porta B configurada como saída ldi temp,0xFF out DDRA,temp ;Porta A configurada como saída ser temp out PORTA,temp ;Garante 0 inicialmente na saída (LED's) ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) ;** Armazenamento dos caracteres de reconhecimento do pacote ldi XL,0x60 ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp ;Armazena o mesmo valor na memória inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória R_IHM: ldi chave,0b11111101 out PORTB,chave ;Seleciona a recepção com a IHM (PB1 em nível baixo) R_Robo: cli ;Desabilita a interrupção ldi XL,0x61 ;Posiciona o ponteiro ldi temp,0b10010000 out UCR,temp ;Habilita recepção e interrupção por recepção completa de dados clr count ;Limpa a variável count clr count2 ;Limpa a variável count2 clr temp ;Limpa a variável temp sei ;Habilita a interrupção Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA
- 230. 212 10.1.14 Programa Completo do Circuito do Robô PROGRAMA PARA MICROCONTROLADOR A T 9 0 S 8 5 1 5 Título: Programa completo do circuito do Robô (última versão) Módulo: Robô Linguagem: Assembler Arquivo: FRob_v09.asm Objetivo: Testar o funcionamento completo do robô. Descrição: Parte 1 (Recepção por meio de RF): Uma seqüência de 12 bytes codificados deve ser recebida através da UART (módulo de recepção), sendo: Bytes 1 e 2: CCh (identificação do pacote de dados) Bytes 3 e 4: Direção dos motores Bytes 5 e 6: Velocidade do motor 2 (esquerdo) Bytes 7 e 8: Velocidade do motor 1 (direito) Bytes 9 e 10: Número de pulsos detectados pelo sensor do motor 1 Bytes 11 e 12: Número de pulsos detectados pelo sensor do motor 2 Os dados são decodificados e os comandos executados pelo robô. Sensores de velocidade: Após a leitura dos pulsos detectados pelos sensores de velocidade, os motores devem ser desligados de forma independente, de acordo com a leitura dos pulsos, após a parada total dos motores, os sensores de velocidade são desligados. Obstáculo: O sensor de ultrasom é acionado. Através do pino 4 da Porta B do microcontrolador, é medido o tempo em que a saída do sensor fica em nível alto. Esse tempo é armazenado na memória o qual será enviado ao PC em decimal o tempo medido. Transmissão por meio de RF: Uma seqüência de 6 bytes deve ser transmitida ao módulo de recepção da IHM através da UART (módulo de transmissão), sendo: Bytes 1 e 2: CCh (identificação do pacote de dados) Bytes 3: Quantidade de rotações do Motor 1 Bytes 4: Quantidade de rotações do Motor 2 Bytes 5: Tempo de vôo que a onda leva para retornar ao sensor registrador de 16 bits (TCNT1H) Bytes 6: Tempo de vôo que a onda leva para retornar ao sensor registrador de 16 bits (TCNT1L) Por fim, os dados são codificados e transmitidos à IHM utilizando-se o módulo de transmissão RF. Parte 2 (Transmitir novamente): Se os bytes recebidos após a identificação do pacote de dados for igual a AA em hexadecimal, isso significa que o dado anteriormente enviado, deve ser enviado novamente. Parte 3 (Leitura do sonar): Se os bytes recebidos após a identificação do pacote de dados for igual a 55 em hexadecimal, isso significa que o sensor de ultrasom precisa fazer uma nova leitura do ambiente e esse dado deve ser enviado ao módulo de recepção. .include 8515def.inc ;** Declaração das Variáveis .def temp = r16 .def temp1 = r17 .def temp2 = r18
- 231. 213 .def temp3 = r19 .def final = r20 .def vfinal = r21 .def count = r22 .def chave = r23 .def ponteiro1 = r24 .def ponteiro2 = r25 rjmp RESET ;Pula para o Programa Principal .org URXCaddr ;UART Receive Complete Interrupt Vector Address rjmp Receber .org UDREaddr ;UART Data Register Empty Interrupt Vector Address rjmp Transmitindo ;** Bloco de transmissão dos dados codificados Transmitindo: inc XL ;Posiciona o ponteiro ld temp,X ;Carrega o dado armazenado na variável temp out UDR,temp ;Envia os dados armazenados na variável temp para o registrador de dados da UART cpi XL,0x7A ;Compara para saber se o último caractere foi enviado breq Atraso ;Pula para o bloco Atraso se todos os dados foram enviados reti ;Retorna da interrupção Atraso: rjmp Atraso_P1 ;Comando intermediário de pulo, pois a função breq estava fora de alcance ;** Bloco que faz a leitura dos dados recebidos Receber: in temp,UDR ;Lê os dados recebidos inc count ;Incrementa a variável count cpi count,3 ;Compara a variável count com 3 brlo Confirmar ;Pula para o bloco Confirmar se count for menor que 3 rjmp Armazena ;Pula para o bloco Armazena se count for maior que 3 ;** Reconhecimento de pacote de dados válidos Confirmar: cpi temp,0xCC ;Compara a variável temp com 11001100b breq Retornando1 ;Pula para o bloco Retornando1 se temp for igual a CCh clr count ;Limpa a variável count se não for reconhecido o pacote de dados reti ;Retorna da interrupção Retornando1: reti ;Retorna da interrupção ;** Armazenamento dos dados recebidos após identificação do pacote Armazena: inc XL ;Incrementa o ponteiro st X,temp ;Armazena o dado recebido cpi count,12 ;Compara count com 12 para armazenar até 10 caracteres recebidos breq Converte ;Pula para decodificar os dados se count for igual à 12 reti ;Retorna da interrupção ;** Bloco Checksum, utilizado para confirmar se o dado recebido anteriormente está correto ReceberDenovo: ldi temp3,2 ;Carrega 2 na variável temp3 clr count ;Limpa a variável count ldi XL,0x7F ;Posiciona o ponteiro reti ;Retorna da interrupção Checksum1: ldi XL,0x5F ;Posiciona o ponteiro clr temp1 ;Limpa a variável temp1 Checksum2: inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp add temp1,temp ;Adiciona o valor da variável temp com a variável temp1 e ;armazena o resultado na variável temp1 cpi XL,0x69 ;Compara para saber se todos os valores foram somados brne Checksum2 ;Pula para o bloco Checksum2 caso negativo Checksum3: ldi XL,0x7F ;Posiciona o ponteiro clr temp2 ;Limpa a variável temp2
- 232. 214 Checksum4: inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp add temp2,temp ;Adiciona o valor da variável temp com a variável temp2 e ;armazena o resultado na variável temp2 cpi XL,0x89 ;Compara para saber se todos os valores foram somados brne Checksum4 ;Pula para o bloco Checksum4 caso negativo ldi temp3,3 ;Carrega 3 na variável temp3 cp temp1,temp2 ;Compara para saber se os dados recebidos são iguais breq Converte ;Pula para o bloco Converte em caso positivo rjmp Denovo ;Se os dados forem diferentes pula para o bloco Denovo para reiniciar o processo ;** Bloco que faz a transmissão do dado já enviado anteriormente TransmitirDeNovo: ldi temp3,4 ;Carrega 4 na variável temp ldi XL,0x60 ;Posiciona o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp cpi temp,0xAA ;Compara com o valor AA em hexadecimal brne Converte ;Caso não seja igual a AA, pula para o bloco Converte rjmp Transmitir ;Caso seja igual a AA, pula para o bloco Transmitir, pois significa que o dado já foi ;enviado anteriormente e dessa forma já está codificado para o envio ;** Bloco que faz a leitura do sensor de ultrasom SonarDeNovo: clr temp3 ;Limpa a variável temp3 ldi XL,0x60 ;Posiciona o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp cpi temp,0x55 ;Compara com o valor 55 em hexadecimal brne Converte ;Caso não seja igual a 55, pula para o bloco Converte ldi XL,0x75 ;Caso seja igual a 55, posiciona o ponteiro rjmp Sonar ;Pula para o bloco Sonar ;** Bloco que faz a decodificação dos dados recebidos Converte: cpi temp3,1 breq ReceberDenovo ;Pula para o bloco que verifica se os dados já foram recebidos duas vezes cpi temp3,2 breq Checksum1 ;Pula para o bloco que faz a confirmação dos dados recebidos cpi temp3,3 breq TransmitirDeNovo ;Pula para o bloco que verifica se os dados enviados ;anteriormente, devem ser enviados de novo cpi temp3,4 breq SonarDeNovo ;Pula para o bloco que verifica se foi solicitado uma nova ;leitura dos dados do sensor de ultrasom cli ;Desabilita a interrupção clr count ;Limpa a variável count ldi XL,0x5F ;Posiciona o ponteiro ;** Bloco que inicia a decodificação dos dados recebidos Convertendo: inc count ;Incrementa o contador inc XL ;Incrementa o ponteiro ld temp,X ;Carrega o dado codificado (recebido) na variável temp clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 andi temp,0x01 ;Verifica o valor do primeiro bit (AND com 00000001b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x02 ;Verifica o valor do segundo bit (AND com 00000010b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x04 ;Verifica o valor do terceiro bit (AND com 00000100b) add final,temp ;Adiciona o valor da variável temp à variável final lsr temp1 ;Desloca os bits da variável temp1 para a direita mov temp,temp1 ;Copia o valor da variável temp para a variável temp1 andi temp,0x08 ;Verifica o valor do quarto bit (AND com 00001000b) add final,temp ;Adiciona o valor da variável temp à variável final cpi count,1 ;Compara count com 1 para saber se apenas a primeira parte do byte foi decodificado breq Parte1 ;Pula para o bloco Parte 1 se verdadeiro rjmp Parte2 ;Pula para o bloco Parte 2 se já tiver sido decodificado o byte inteiro Parte1:
- 233. 215 mov vfinal,final ;Armazena a primeira parte do byte decodificado na variável vfinal rjmp Convertendo ;Pula para o bloco Convertendo para continuar com a decodificação dos dados Parte2: swap final ;Inverte a posição dos últimos bits pelos primeiros add vfinal,final ;Adiciona a segunda parte do byte decodificado à primeira parte mov ponteiro1,XL ;Armazena a posição do ponteiro na variável ponteiro1 cpi ponteiro1,0x62 ;Verifica se o primeiro byte recebido já foi decodificado e armazenado brsh Pula ;Pula para o bloco Pula se verdadeiro ldi XL,0x80 ;Posiciona o ponteiro mov ponteiro2,XL ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado decodificado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo Pula: inc ponteiro2 ;Posiciona o ponteiro mov XL,ponteiro2 ;Armazena o valor do ponteiro na variável ponteiro2 st X,vfinal ;Armazena o dado na memória clr count ;Limpa a variável count clr vfinal ;Limpa a variável vfinal cpi ponteiro2,0x84 ;Verifica se todos os dados recebidos foram decodificados e armazenados breq Aciona ;Pula para o bloco Aciona se verdadeiro mov XL,ponteiro1 ;Posiciona o ponteiro rjmp Convertendo ;Pula para o bloco Convertendo ;** Bloco de acionamento dos motores Aciona: ldi XL,0x80 ;Posiciona o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out PORTB,temp ;Manda para o PortB o comando de direção dos motores inc XL ;Incrementa o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out OCR1AL,temp ;Configura a velocidade do PWM A de acordo com o valor recebido inc XL ;Incrementa o ponteiro ld temp,X ;Copia o dado armazenado na variável temp out OCR1BL,temp ;Configura a velocidade do PWM B de acordo com o valor recebido rjmp Leitura ;Pula para o bloco Leitura Retornando2: reti ;Retorna da interrupção ;** Loop de Atraso Atraso_P1: inc count ;Incrementa o valor da variável count ldi XL,0x6F ;Posiciona o ponteiro cpi count,20 ;Compara para verificar se já enviou o mesmo dado 20 vezes brlo Retornando2 ;Retorna da interrupção caso negativo ;** Inicia o loop de atraso Atraso_P2: ldi ponteiro1,255 ;Carrega 255 na variável ponteiro1 ldi ponteiro2,2 ;Carrega 2 na variável ponteiro2 Loop: dec ponteiro1 ;Decrementa a variável ponteiro1 brne loop ;Pula para Loop caso não esteja zerado a variável ponteiro1 dec ponteiro2 ;Decrementa a variável ponteiro2 brne loop ;Pula para Loop caso não esteja zerado a variável ponteiro2 cli ;Desabilita a interrupção rjmp RESET ;Pula para o bloco RESET para reiniciar todo o processo ;** Bloco que armazena os valores de velocidade e direção dos motores Leitura: cli ;Desabilita a interrupção ldi temp,0x00 ;Copia o valor 00h para a variável temp out PORTC,temp ;Liga os sensores de velocidade clr final ;Limpa a variável final clr temp ;Limpa a variável temp clr temp1 ;Limpa avariável temp1 clr temp2 ;Limpa a variável temp2 clr temp3 ;Limpa a variável temp3 ldi XL,0x83 ;Posiciona o ponteiro ld temp,X ;Copia o dado armazenado na variável temp (motor direito)
- 234. 216 ldi XL,0x84 ;Posiciona o ponteiro ld temp1,X ;Copia o dado armazenado na variável temp1 (motor esquerdo) ldi XL,0x81 ;Posiciona o ponteiro ld r24,X ;Armazena a velocidade do PWM A (Motor esquerdo) no registrador r24 inc XL ;Incrementa o ponteiro ld r25,X ;Armazena a velocidade do PWM B (Motor direito) no registrador r25 ldi r22,0xFE ;Copia o valor FEh para o registrador r22 rjmp Espera_2b ;Pula para o bloco Espera_2b ;Variáveis relacionadas com cada um dos motores: ;Motor direito: temp, t2, r25 e OCR1BL ;Motor esquerdo: temp1, t3, r24 e OCR1AL ;** Bloco que compara a leitura atual dos pulsos de cada um dos sensores de velocidade Compara_t2_t3: cp temp2,temp3 brlo t2_menor_t3 ;Pula para o bloco t2_menor_t3, caso o sensor de velocidade ;do lado direito tenha detectado menos pulsos que o esquerdo cp temp3,temp2 brlo t3_menor_t2 ;Pula para o bloco t3_menor_t2, caso o sensor de velocidade ;do lado esquerdo tenha detectado menos pulsos que o direito cpi r21,1 breq Espera_1aa ;Pula para a posição de leitura dos sensores cpi r21,2 breq Espera_2aa ;Pula para a posição de leitura dos sensores cpi r21,3 breq Espera_1bb ;Pula para a posição de leitura dos sensores cpi r21,4 breq Espera_2bb ;Pula para a posição de leitura dos sensores t2_menor_t3: cpi r22,0xFF breq Pula1 ;Caso o motor esquerdo já esteja desligado, pula para o bloco Pula1 e não faz nada cpi r25,30 brsh Mdireito_maior_30 ;Caso o motor direito não esteja com velocidade máxima, pula ;para o bloco que aumenta a velocidade em aproximadamente 10% cpi r24,200 brsh Pula1 ;Caso o motor esquerdo já esteja com uma velocidade baixa, cerca ;de 20% do total, pula para o bloco Pula1 e não faz nada ldi r20,30 ;Carrega 30 no registrador r20 add r24,r20 ;Adiciona 30 ao registrador r24 out OCR1AL,r24 ;Reduz a velocidade do motor esquerdo em aproximadamente 10% Pula1: cpi r21,1 breq Espera_1a ;Pula para a posição de leitura dos sensores cpi r21,2 breq Espera_2a ;Pula para a posição de leitura dos sensores cpi r21,3 breq Espera_1bb ;Pula para a posição de leitura dos sensores cpi r21,4 breq Espera_2bb ;Pula para a posição de leitura dos sensores Mdireito_maior_30: subi r25,30 ;Subtrai 30 do registrador r25 out OCR1BL,r25 ;Aumenta a velocidade do motor direito em aproximadamente 10% cpi r21,1 breq Espera_1a ;Pula para a posição de leitura dos sensores cpi r21,2 breq Espera_2a ;Pula para a posição de leitura dos sensores cpi r21,3 breq Espera_1b ;Pula para a posição de leitura dos sensores cpi r21,4 breq Espera_2bb ;Pula para a posição de leitura dos sensores t3_menor_t2: cpi r22,0xFF breq Pula2 ;Caso o motor direito já esteja desligado, pula para o bloco Pula2 e não faz nada cpi r24,30 brsh Mesquerdo_maior_30 ;Caso o motor esquerdo não esteja com velocidade máxima, pula ;para o bloco que aumenta a velocidade em aproximadamente 10% cpi r25,200 brsh Pula2 ;Caso o motor direito já esteja com uma velocidade baixa, cerca ;de 20% do total, pula para o bloco Pula2 e não faz nada ldi r20,30 ;Carrega 30 no registrador r20 add r25,r20 ;Adiciona 30 ao registrador r25
- 235. 217 out OCR1BL,r25 ;Reduz a velocidade do motor direito em aproximadamente 10% Pula2: cpi r21,1 breq Espera_1a ;Pula para a posição de leitura dos sensores cpi r21,2 breq Espera_2a ;Pula para a posição de leitura dos sensores cpi r21,3 breq Espera_1b ;Pula para a posição de leitura dos sensores cpi r21,4 breq Espera_2b ;Pula para a posição de leitura dos sensores Mesquerdo_maior_30: subi r24,30 ;Subtrai 30 do registrador r24 out OCR1AL,r24 ;Aumenta a velocidade do motor esquerdo em aproximadamente 10% cpi r21,1 breq Espera_1a ;Pula para a posição de leitura dos sensores cpi r21,2 breq Espera_2a ;Pula para a posição de leitura dos sensores cpi r21,3 breq Espera_1b ;Pula para a posição de leitura dos sensores cpi r21,4 breq Espera_2b ;Pula para a posição de leitura dos sensores Espera_1aa: rjmp Espera_1a ;Pula para a posição de leitura dos sensores Espera_2aa: rjmp Espera_2a ;Pula para a posição de leitura dos sensores Espera_1bb: rjmp Espera_1b ;Pula para a posição de leitura dos sensores Espera_2bb: rjmp Espera_2b ;Pula para a posição de leitura dos sensores ;** Bloco de leitura dos sensores de velocidade ;** Situação inicial Detecta: sbis PINB,7 ;Ímã detectado? rjmp Incremento_1a ;Sim, então desvia para incremento sbis PINB,6 ;Ímã detectado? rjmp Incremento_2a ;Sim, então desvia para incremento rjmp Detecta ;Fica nesse loop até detectar um ímã ;** Situação: (7 é setado, 6 não é setado) Incremento_1a: inc temp2 ;Incrementa a variável temp2 ldi r21,1 ;Carrega 1 no registrador r21 rjmp Compara_t2_t3 ;Pula para o bloco que faz a compensação das velocidades Espera_1a: cp temp,temp2 ;Compara para ver se a quantidade de pulsos desejado já foi atingida breq Desabilita_1a ;Pula para o bloco Desabilita_1a em caso positivo sbis PINB,6 ;Ímã detectado? rjmp Incremento_2b ;Sim, então desvia para incremento sbis PINB,7 ;Ímã ainda sendo detectado? rjmp Espera_1a ;Continua verificando até que o ímã do lado direito deixe de ser detectado rjmp Detecta ;Pula para o bloco Detecta em caso positivo ;** Situação: (7 não é setado, 6 é setado) Incremento_2a: inc temp3 ;Incrementa a variável temp3 ldi r21,2 ;Carrega 2 no registrador r21 rjmp Compara_t2_t3 ;Pula para o bloco que faz a compensação das velocidades Espera_2a: cp temp1,temp3 ;Compara para ver se a quantidade de pulsos desejado já foi atingida breq Desabilita_2a ;Pula para o bloco Desabilita_2a em caso positivo sbis PINB,7 ;Ímã detectado? rjmp Incremento_1b ;Sim, então desvia para incremento sbis PINB,6 ;Ímã ainda sendo detectado? rjmp Espera_2a ;Continua verificando até que o ímã do lado esquerdo deixe de ser detectado rjmp Detecta ;Pula para o bloco Detecta em caso positivo ;** Situação: (7 é setado, 6 está setado) Incremento_1b: inc temp2 ;Incrementa a variável temp2 ldi r21,3 ;Carrega 3 no registrador r21 rjmp Compara_t2_t3 ;Pula para o bloco que faz a compensação das velocidades Espera_1b:
- 236. 218 cp temp,temp2 ;Compara para ver se a quantidade de pulsos desejado já foi atingida breq Desabilita_1b ;Pula para o bloco Desabilita_1b em caso positivo sbic PINB,6 ;Ímã ainda sendo detectado? rjmp Espera_1a ;Sim, então desvia para Espera_1a sbis PINB,7 ;Ímã ainda sendo detectado? rjmp Espera_1b ;Continua verificando até que o ímã do lado direito deixe de ser detectado rjmp Espera_2a ;Pula para o bloco Espera_2b em caso positivo ;** Situação: (7 está setado, 6 é setado) Incremento_2b: inc temp3 ;Incrementa a variável temp3 ldi r21,4 ;Carrega 4 no registrador r21 rjmp Compara_t2_t3 ;Pula para o bloco que faz a compensação das velocidades Espera_2b: cp temp1,temp3 ;Compara para ver se a quantidade de pulsos desejado já foi atingida breq Desabilita_2b ;Pula para o bloco Desabilita_2b em caso positivo sbic PINB,7 ;Ímã ainda sendo detectado? rjmp Espera_2a ;Sim, então desvia para Espera_2a sbis PINB,6 ;Ímã ainda sendo detectado? rjmp Espera_2b ;Continua verificando até que o ímã do lado esquerdo deixe de ser detectado rjmp Espera_1a ;Pula para o bloco Espera_1a em caso positivo ;** Bloco para zerar a velocidade dos motores Desabilita_1a: out OCR1BL,r22 ;Configura a velocidade do PWM B para zero cp temp3,temp1 brsh Desabilita_1_dec ;Pula para o bloco que desabilita os dois motores, caso ambos ;tenham atingido a quantidade de pulsos desejada inc temp2 ;Incrementa a variável temp2 inc r22 ;Incrementa o registrador r22 ldi r25,0xFF ;Armazena FF no registrador r25 rjmp Espera_1a ;Pula para a posição de leitura dos sensores Desabilita_1b: out OCR1BL,r22 ;Configura a velocidade do PWM B para zero cp temp3,temp1 brsh Desabilita_1_dec ;Pula para o bloco que desabilita os dois motores, caso ambos ;tenham atingido a quantidade de pulsos desejada inc temp2 ;Incrementa a variável temp2 inc r22 ;Incrementa o registrador r22 ldi r25,0xFF ;Armazena FF no registrador r25 rjmp Espera_1b ;Pula para a posição de leitura dos sensores Desabilita_2a: out OCR1AL,r22 ;Configura a velocidade do PWM A para zero cp temp2,temp brsh Desabilita_2_dec ;Pula para o bloco que desabilita os dois motores, caso ambos ;tenham atingido a quantidade de pulsos desejada inc temp3 ;Incrementa a variável temp3 inc r22 ;Incrementa o registrador r22 ldi r24,0xFF ;Armazena FF no registrador r24 rjmp Espera_2a ;Pula para a posição de leitura dos sensores Desabilita_2b: out OCR1AL,r22 ;Configura a velocidade do PWM A para zero cp temp2,temp brsh Desabilita_2_dec ;Pula para o bloco que desabilita os dois motores, caso ambos ;tenham atingido a quantidade de pulsos desejada inc temp3 ;Incrementa a variável temp3 inc r22 ;Incrementa o registrador r22 ldi r24,0xFF ;Armazena FF no registrador r24 rjmp Espera_2b ;Pula para a posição de leitura dos sensores Desabilita_1_dec: cpi r22,0xFE breq Desabilita ;Verifica se o sensor esquerdo já havia detectado a quantidade de pulsos desejada dec temp3 ;Decrementa a variável temp3 rjmp Desabilita ;Pula para o bloco que vai desabilitar o funcionamento dos motores, mas continuará ;fazendo a leitura dos sensores de velocidade até a parada completa dos motores Desabilita_2_dec: cpi r22,0xFE breq Desabilita ;Verifica se o sensor direito já havia detectado a quantidade de pulsos desejada dec temp2 ;Decrementa a variável temp2 rjmp Desabilita ;Pula para o bloco que vai desabilitar o funcionamento dos motores, mas continuará ;fazendo a leitura dos sensores de velocidade até a parada completa dos motores
- 237. 219 ;** Bloco para desabilitar o funcionamento dos motores Desabilita: ldi temp,0x00 out PORTB,temp ;Manda para o PortB o comando de direção dos motores ;** Bloco que continua fazendo a detecção dos ímãs ldi temp,255 ;Carrega 255 na variável temp ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final ;** Situação inicial Detecta_continua: inc ponteiro1 ;Incrementa a variável ponteiro1 cpi ponteiro1,255 ;Compara ponteiro1 com 255 breq D_cont_ponteiro ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro1 seja igual a 255 sbic PINB,7 ;Ímã detectado? rjmp Inc_1a_continua ;Sim, então desvia para incremento sbic PINB,6 ;Ímã detectado? rjmp Inc_2a_continua ;Sim, então desvia para incremento rjmp Detecta_continua ;Fica nesse loop até detectar um ímã ou o tempo estourar ;** Bloco que verifica se o tempo de espera de parada dos motores já foi atingido D_cont_ponteiro: inc ponteiro2 ;Incrementa a variável ponteiro2 cpi ponteiro2,255 ;Compara ponteiro2 com 255 breq D_cont_ponteiro2 ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro2 seja igual a 255 rjmp Detecta_continua ;Pula para o bloco Detecta_continua, caso o tempo não tenha estourado D_cont_ponteiro2: inc final ;Incrementa a variável final cpi final,10 ;Compara final com 10 breq Guardar_fim_pulo ;Pula para o bloco que desabilita os sensores de velocidade ;pois o tempo de parada dos motores já foi alcançado (final = 10) rjmp Detecta_continua ;Pula para o bloco Detecta_continua, caso o tempo não tenha estourado Guardar_fim_pulo: rjmp Guardar_fim ;** Situação: (7 é setado, 6 não é setado) Inc_1a_continua: inc temp2 ;Incrementa a variável temp2 ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final E_1a_continua: inc ponteiro1 ;Incrementa a variável ponteiro1 cpi ponteiro1,255 ;Compara ponteiro1 com 255 breq E_1a_cont_ponteiro ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro1 seja igual a 255 sbic PINB,6 ;Ímã detectado? rjmp Inc_2b_continua ;Sim, então desvia para incremento sbic PINB,7 ;Ímã ainda sendo detectado? rjmp E_1a_continua ;Continua verificando até que o ímã deixe de ser detectado, ou o tempo estoure ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final rjmp Detecta_continua ;Pula para o bloco Detecta_continua, caso o tempo não tenha estourado ;** Situação: (7 não é setado, 6 é setado) Inc_2a_continua: inc temp3 ;Incrementa a variável temp3 ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final E_2a_continua: inc ponteiro1 ;Incrementa a variável ponteiro1 cpi ponteiro1,255 ;Compara ponteiro1 com 255 breq E_2a_cont_ponteiro ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro1 seja igual a 255 sbic PINB,7 ;Ímã detectado? rjmp Inc_1b_continua ;Sim, então desvia para incremento sbic PINB,6 ;Ímã ainda sendo detectado? rjmp E_2a_continua ;Continua verificando até que o ímã deixe de ser detectado, ou o tempo estoure
- 238. 220 ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final rjmp Detecta_continua ;Pula para o bloco Detecta_continua, caso o tempo não tenha estourado ;** Situação: (7 é setado, 6 está setado) Inc_1b_continua: inc temp2 ;Incrementa a variável temp2 ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final E_1b_continua: inc ponteiro1 ;Incrementa a variável ponteiro1 cpi ponteiro1,255 ;Compara ponteiro1 com 255 breq E_1b_cont_ponteiro ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro1 seja igual a 255 sbis PINB,6 ;Ímã ainda sendo detectado? rjmp E_1a_continua ;Sim, então desvia para o bloco E_1a_continua sbic PINB,7 ;Ímã ainda sendo detectado? rjmp E_1b_continua ;Continua verificando até que o ímã deixe de ser detectado, ou o tempo estoure ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final rjmp E_2a_continua ;Pula para o bloco E_2a_continua, caso o tempo não tenha ;estourado e o ímã não esteja mais sendo detectado ;** Situação: (7 está setado, 6 é setado) Inc_2b_continua: inc temp3 ;Incrementa a variável temp ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final E_2b_continua: inc ponteiro1 ;Incrementa a variável ponteiro1 cpi ponteiro1,255 ;Compara ponteiro1 com 255 breq E_2b_cont_ponteiro ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro1 seja igual a 255 sbis PINB,7 ;Ímã ainda sendo detectado? rjmp E_2a_continua ;Sim, então desvia para o bloco E_2a_continua sbic PINB,6 ;Ímã ainda sendo detectado? rjmp E_2b_continua ;Continua verificando até que o ímã deixe de ser detectado, ou o tempo estoure ldi ponteiro1,0 ;Zera a variável ponteiro1 ldi ponteiro2,0 ;Zera a variável ponteiro2 ldi final,0 ;Zera a variável final rjmp E_1a_continua ;Pula para o bloco E_1a_continua, caso o tempo não tenha ;estourado e o ímã não esteja mais sendo detectado ;** Bloco que verifica se o tempo de espera de parada dos motores já foi atingido E_1a_cont_ponteiro: inc ponteiro2 ;Incrementa a variável ponteiro2 cpi ponteiro2,255 ;Compara a variável ponteiro2 com 255 breq E_1a_cont_ponteiro2 ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro2 seja igual a 255 rjmp E_1a_continua ;Pula para o bloco E_1a_continua, caso o tempo não tenha estourado E_1a_cont_ponteiro2: inc final ;Incrementa a variável final cpi final,10 ;Compara a variável final com 10 breq Guardar_fim ;Pula para o bloco que desabilita os sensores de velocidade ;pois o tempo de parada dos motores já foi alcançado (final = 10) rjmp E_1a_continua ;Pula para o bloco E_1a_continua, caso o tempo não tenha estourado E_1b_cont_ponteiro: inc ponteiro2 ;Incrementa a variável ponteiro2 cpi ponteiro2,255 ;Compara a variável ponteiro2 com 255 breq E_1b_cont_ponteiro2 ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro2 seja igual a 255 rjmp E_1b_continua ;Pula para o bloco E_1b_continua, caso o tempo não tenha estourado E_1b_cont_ponteiro2: inc final ;Incrementa a variável final cpi final,10 ;Compara a variável final com 10 breq Guardar_fim ;Pula para o bloco que desabilita os sensores de velocidade ;pois o tempo de parada dos motores já foi alcançado (final = 10) rjmp E_1b_continua ;Pula para o bloco E_1b_continua, caso o tempo não tenha estourado E_2a_cont_ponteiro: inc ponteiro2 ;Incrementa a variável ponteiro2
- 239. 221 cpi ponteiro2,255 ;Compara a variável ponteiro2 com 255 breq E_2a_cont_ponteiro2 ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro2 seja igual a 255 rjmp E_2a_continua ;Pula para o bloco E_2a_continua, caso o tempo não tenha estourado E_2a_cont_ponteiro2: inc final ;Incrementa a variável final cpi final,10 ;Compara a variável final com 10 breq Guardar_fim ;Pula para o bloco que desabilita os sensores de velocidade ;pois o tempo de parada dos motores já foi alcançado (final = 10) rjmp E_2a_continua ;Pula para o bloco E_2a_continua, caso o tempo não tenha estourado E_2b_cont_ponteiro: inc ponteiro2 ;Incrementa a variável ponteiro2 cpi ponteiro2,255 ;Compara a variável ponteiro2 com 255 breq E_2b_cont_ponteiro2 ;Pula para o bloco que verifica se já passou tempo suficiente ;para que os motores tenham parado, caso ponteiro2 seja igual a 255 rjmp E_2b_continua ;Pula para o bloco E_2b_continua, caso o tempo não tenha estourado E_2b_cont_ponteiro2: inc final ;Incrementa a variável final cpi final,10 ;Compara a variável final com 10 breq Guardar_fim ;Pula para o bloco que desabilita os sensores de velocidade ;pois o tempo de parada dos motores já foi alcançado (final = 10) rjmp E_2b_continua ;Pula para o bloco E_2b_continua, caso o tempo não tenha estourado ;** Bloco que desabilita os sensores de velocidade Guardar_fim: ldi temp,0xFF ;Copia o valor FFh para a variável temp out PORTC,temp ;Corta a alimentação dos sensores de velocidade ldi XL,0x70 ;Posiciona o ponteiro ldi temp,0xCC ;Armazena o valor 11001100b na variável temp st X,temp ;Armazena o mesmo valor na memória inc XL ;Incrementa o ponteiro st X,temp ;Armazena o mesmo valor na memória inc XL ;Incrementa o ponteiro st X,temp2 ;Armazena o valor da variável temp2 na memória inc XL ;Incrementa o ponteiro st X,temp2 ;Armazena o mesmo valor na memória inc XL ;Incrementa o ponteiro st X,temp3 ;Armazena o valor da variável temp3 na memória inc XL ;Incrementa o ponteiro st X,temp3 ;Armazena o mesmo valor na memória ;** Bloco de contagem do tempo em nível alto do pulso de saída do Sensor Sonar: clr temp ;Limpa a variável temp out TCCR1A,temp ;Zera a contagem do tempo out TCCR1B,temp ;Zera a contagem do tempo out TCNT1H,temp ;Limpa o registrador de 16 bits out TCNT1L,temp ;Limpa o registrador de 16 bits Verifica1: sbis PINB,4 ;Pula a próxima instrução se o pino 4 do Port B estiver em nível alto rjmp Verifica1 ;Aguarda até que o pino 4 do Port B fique em nível alto ;(caso esteja em nível baixo, para iniciar a contagem do tempo) ldi r16,(0CS11)|(1CS10) out TCCR1B,r16 ;Ajuste do prescaler 1:1 (Tempo = Clock/1) Verifica2: sbis PINB,4 ;Pula a próxima instrução se o pino 4 do Port B estiver em nível alto rjmp PararCont ;Pula para o bloco PararCont assim que o pino 4 do Port B fique em nível baixo rjmp Verifica2 ;Aguarda até que o pino 4 do Port B fique em nível baixo ;** Bloco para parar a contagem do Timer PararCont: ldi r16,(0CS11)|(0CS10) out TCCR1B,r16 ;Para o Timer in temp1,TCNT1L ;Lê o valor do byte menos significativo do registrador de 16 bits ;e armazena na variável temp1 in temp2,TCNT1H ;Lê o valor do byte mais significativo do registrador de 16 bits ;e armazena na variável temp2 ;** Bloco de armazenamento das informações a serem transmitidas inc XL ;Incrementa o ponteiro st X,temp1 ;Armazena o valor da variável temp1 na memória inc XL ;Incrementa o ponteiro
- 240. 222 st X,temp1 ;Armazena o mesmo valor na memória inc XL ;Incrementa o ponteiro st X,temp2 ;Armazena o valor da variável temp2 na memória inc XL ;Incrementa o ponteiro st X,temp2 ;Armazena o mesmo valor na memória clr temp ;Limpa a variável temp out TCNT1H,temp ;Limpa o registrador de 16 bits out TCNT1L,temp ;Limpa o registrador de 16 bits Posicionando: clr count ;Limpa a variável count ldi XL,0x72 ;Posiciona o ponteiro ld temp,X ;Carrega o dado na variável temp ;** Bloco de codificação dos dados Codificando_P1: clr temp2 ;Limpa a variável temp2 inc count ;Incrementa a variável count cpi count,6 ;Compara para saber se todos os dados foram codificados breq Transmitir ;Caso positivo pula para o bloco Transmitir andi temp,0x0F ;Codifica apenas os quatro primeiros bits (AND com 00001111b) Codificando_P2: clr final ;Limpa a variável final mov temp1,temp ;Copia o valor da variável temp para a variável temp1 com temp ;Faz o complemento da variável temp lsl temp ;Desloca os bits da variável temp para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x01 ;Codifica o primeiro bit (AND com 00000001b) andi ponteiro1,0x02 ;Codifica o primeiro bit (AND com 00000010b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x04 ;Codifica o segundo bit (AND com 00000100b) andi ponteiro1,0x08 ;Codifica o segundo bit (AND com 00001000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x10 ;Codifica o terceiro bit (AND com 00010000b) andi ponteiro1,0x20 ;Codifica o terceiro bit (AND com 00100000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final lsl temp ;Desloca os bits da variável temp para a esquerda lsl temp1 ;Desloca os bits da variável temp1 para a esquerda mov ponteiro1,temp ;Copia o valor da variável temp para a variável ponteiro1 mov ponteiro2,temp1 ;Copia o valor da variável temp1 para a variável ponteiro2 andi ponteiro2,0x40 ;Codifica o quarto bit (AND com 01000000b) andi ponteiro1,0x80 ;Codifica o quarto bit (AND com 10000000b) add ponteiro1,ponteiro2 ;Adiciona o valor da variável ponteiro2 à variável ponteiro1 add final,ponteiro1 ;Adiciona o valor da variável ponteiro1 à variável final ;** Bloco de verificação se o byte inteiro foi codificado st X,final ;Armazena o dado na memória inc XL ;Incrementa o ponteiro ld temp,X ;Lê os dados e armazena na variável temp cpi temp2,0x01 ;Compara se a variável temp2 é igual a 1 breq Codificando_P1 ;Pula para o bloco Codificando_P1 se o byte inteiro foi codificado andi temp,0xF0 ;Codifica apenas os quatro últimos bits (AND com 11110000b) swap temp ;Troca de posição os quatro últimos bits pelos quatro primeiros ldi temp2,0x01 ;Carrega 1 na variável temp2 rjmp Codificando_P2 ;Pula para o bloco que faz a codificação dos dados ;** Bloco de configuração para iniciar a transmissão dos dados codificados Transmitir: clr count ;Limpa a variável count
- 241. 223 ldi XL,0x6D ;Posiciona o ponteiro ldi temp,0b00101000 out UCR,temp ;Habilita transmissão e interrupção por transmissão sei ;Habilita a interrupção rjmp Volta ;Pula para o bloco Volta e fica aguardando a próxima Interrupção RESET: ;** Programa Principal ;** Inicialização de Stack Pointer ldi temp,low(RAMEND) out SPL,temp ldi temp,high(RAMEND) out SPH,temp ldi temp,0b00100000 out DDRD,temp ;Pino OC1A definido como saída demais bits do PortD configurados como entrada ldi temp,0b00101111 out DDRB,temp ;Pinos 0 à 3 definidos como saída para controle dos motores ;Pino 5 definido como saída para controle do sensor de ultrasom ;Pino 4 definido como entrada para recebimento do sinal do sensor de ultrasom ;Pinos 6 e 7 definidos como entrada para recebimento do sinal ;dos sensores de velocidade ldi temp,0b00000011 out DDRC,temp ;Pinos 0 e 1 definidos como saída para controle dos sensores de ;velocidade, demais pinos configurados como entrada ;** Inicialização do Vetor de Dados ldi XH,0x00 ;** Configuração do PWM (A e B) ldi temp,0b11110001 out TCCR1A,temp ;Configuração do modo PWM 8 bits e seleção da seguinte ação para os pinos OC1B ;e OC1A (PD5): ;Clear quando o valor de comparação atingido na contagem crescente, seta quando o ;valor de comparação atingido na contagem decrescente ;O pino OC1B é a saída PWM para o motor 2 ;O pino OC1A (PD5) é a saída PWM para o motor 1 ldi temp,0b00000001 out TCCR1B,temp ;Libera timer1, incrementado pelo clock sem prescaler ;Portanto freqüência do PWM = freqüência do clock ldi temp,0 ;Zera o conteúdo dos registradores altos out OCR1AH,temp ;Referências para o PWM out OCR1BH,temp ldi temp,255 ;Força a velocidade inicial = 0 out OCR1AL,temp out OCR1BL,temp ;** Programação da UART ldi temp,103 out UBRR,temp ;Ajuste da freqüência Baud Rate = 2400Hz (Tabela) DeNovo: cli ;Desabilita a interrupção ldi temp,0b10010000 out UCR,temp ;Habilita recepção e interrupção por recepção completa de dados ldi temp3,1 ;Carrega 1 na variável temp3 clr count ;Limpa a variável count clr temp ;Limpa a variável temp ldi XL,0x5F ;Posiciona o ponteiro sei ;Habilita a interrupção Volta: rjmp Volta ;Fica nele mesmo até receber uma interrupção ;** FIM DO PROGRAMA
- 242. 224 11 REFERÊNCIAS [1] HAYES, A. T., MARTINOLI, A. e GOODMAN, R. M., “Distributed Odor Source Localization”, IEEE Sensors Journal, Vol. 2, No. 3, Junho, 2002. [2] KAWAGUCHI, Y., YOSHIDA, I., KURUMATANI, H., KIKUTA, T. e YAMADA, Y., “Internal Pipe Inspection Robot”, Proceedings of IEEE International Conferences on Robotics and Automation, Nagoya, Japan, Vol. 1, p. 857 – 862, 1995. [3] DUCKETT, T., AXELSSON, M., SAFFIOTTI, A., “Learning to Locate an Odour Source with a Mobile Robot”, Proceedings of International Conferences on Robotics and Automation, Vol. 4, p. 4017 – 4022, 2001. [4] LILIENTHAL, A., DUCKETT, T., “Gas Source Localisation by Constructing Concentration Gridmaps with a Mobile Robot”, Proceedings of the European Conference on Mobile Robots, 2003. [5] MONKMAN, G. J. e TAYLOR, P. M., “Thermal Tactile Sensing”, IEEE Transactions on Robotics and Automation, Vol. 9, No. 3, Junho, 1993. [6] RUSSEL, R. A., “Heat Trails as Short-Lived Navigational Markers for Mobile Robots”, Proceedings of the 1997 IEEE International Conference on Robotics and Automation, Albuquerque, New Mexico, Abril, 1997. [7] WAGNER, I. A., LINDENBAUM, M. e BRUCKSTEIN, A. M., “Distributed Covering by Ant-Robots Using Evaporating Traces”, IEEE Transactions on Robotics and Automation, Vol. 15, No. 5, Outubro, 1999. [8] COSTA, A. H. R. e PEGORARO, R., “Construindo Robôs Autônomos para Partidas de Futebol: O Time Guaraná”, SBA Controle Automação, Vol. 11, No. 03, Set., Out., Nov., Dezembro de 2000.
- 243. 225 [9] GOMES, M. M., KAWAMURA, J., LEONARDI, F., PARRO, V. C. e SEIFER, P. G., “Aplicação do Sistema de Futebol de Robôs como Ferramenta Didática”, XXIX COBENGE – Congresso Brasileiro de Ensino de Engenharia, Porto Alegre, RS, Setembro, 2001. [10] KITANO, H., ASADA, M., NODA, I. e MATSUBARA, H., “RoboCup: Robot World Cup”, IEEE Robotics Automation Magazine, Setembro, 1998. [11] VIEIRA, F. C., ALSINA, P. J. e MEDEIROS, A. A. D., “Micro-Robot Soccer Team – Mechanical and Hardware Implementation”, Proceedings of COBEM, Robotics and Control – XVI Congresso Brasileiro de Engenharia Mecânica, Vol. 15, p. 534 – 540, Novembro, 2001. [12] HWANG, S. e KINTIGH, B. P., “Implementation of An Intelligent Roving Robot Using Multiple Sensors”, Proceedings of the 1994 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI’ 94), Las Vegas, NV, Outubro, 1994. [13] DINNOUTI, L. S., VICTORINO, A. C. e SILVEIRA, G. F., “Simultaneous Localization and Map Building by a Mobile Robot Using Sonar Sensors” Proceedings of the 17th International Congress of Mechanical Engineering – COBEM 2003, São Paulo, Novembro, 2003. [14] AIRES, K. R. T., ALSINA, P. J. e MEDEIROS, A. A. D., “A Global Vision System for Mobile Mini-Robots” Proceedings of XVI COBEM – Congresso Brasileiro de Engenharia Mecânica, Vol. 15, p. 240 – 247, Novembro, 2001. [15] AMBROSE, R., ASKEW, R. S., “An Experimental Investigation of Actuators for Space Robots” IEEE International Conference on Robotics and Automation, p. 2625 – 2630, 1995. [16] ASSIS, W. O., COELHO, A. D., GOMES, M. M., LABATE, C. G., CALASSO, D. F., CONDE FILHO, J. C. G., GUIMARÃES, F. A. Construção de robôs jogadores de futebol, Revista Mecatrônica Fácil, nº 26, São Paulo, Janeiro/ Fevereiro, 2006.
- 244. 226 [17] ADÔRNO, B. V. “Controles de velocidade e trajetória para o robô Sonic Shark e sensoriamento por ultra-som”, Curso de Engenharia Mecatrônica, Faculdade de Tecnologia, Brasília, Junho, 2004. [18] OTTONI, G. L., LAGES, W. F. “Navegação de Robôs Móveis em Ambientes Desconhecidos utilizando Sonares de Ultra-som”, Revista Controle Automação, Vol. 14, n. 4, Outubro/ Novembro/ Dezembro, 2003. [19] BIANCHI, R. A. C., SIMÕES, A. S., COSTA, A. R. “Comportamentos reativos para seguir pistas em um robô móvel guiado por visão”, Simpósio Brasileiro de Automação Inteligente, 2001. [20] SANDI, F. A., HEMERLY, E. M., LAGES, W. F. “Sistema para navegação e guiagem de robôs móveis autônomos”, SBA Controle Automação, Vol. 9, nº 3, Setembro/ Outubro/ Novembro/ Dezembro, 1998. [21] MAXIM, INTEGRATED PRODUCTS., “+/- 15kV ESD-Protected, +5V RS-232 Transceivers”, 1996. Disponível em: http://www.maxim-ic.com. Acesso em: Jan/2004. [22] HITACHI, Ltd., “HD74HC244 – Octal Buffers/ Line Drivers/ Line Receivers (with noninverted 3-state outputs)”, 1999. Disponível em: http://www.has.hitachi.com.sg. Acesso em: Jan/2004. [23] BRAGA, N. C., “Controle Remoto de 4 Canais”, Revista Saber Eletrônica, Editora Saber Ltda., São Paulo, Ano 34, No. 316, páginas 8 a 12, Maio, 1999. [24] SOARES, M. J., “Robô RF”, Revista Mecatrônica Fácil, Editora Saber Ltda., São Paulo, Ano 3, No. 15, páginas 38 a 45, Março, 2004. [25] ATMEL, CORPORATION., “8 Bit AVR Microcontroller with 8K Bytes In-System Programmable Flash AT90S8515”, 2001. Disponível em: http://www.atmel.com. Acesso em: Jan/2004.
- 245. 227 [26] STMICROELECTRONICS., “L298 – Dual Full Bridge Driver”, 2000. Disponível em: http://www.st.com. Acesso em: Jan/2004. [27] PIERI, E. R., “Curso de Robótica Móvel”, Universidade Federal de Santa Catarina, Programa de Pós-graduação em Engenharia Elétrica, Florianópolis, Março, 2002. [28] FENG, L., BORENSTEIN, J. and EVERETT, H. R., “Where am I? - Sensors and Methods for Autonomous Mobile Robot Positioning”, The University of Michigan, Vol. 3, December, 1994. [29] BORENSTEIN, J., EVERETT, H. R. e FENG, L., “Where am I? - Sensors and Methods for Mobile Robot Positioning”, The University of Michigan, Abril, 1996. [30] PHILIPS SEMICONDUCTORS., “KMI18/2 Integrated rotational speed sensor”, Setembro, 2000. Disponível em: http://www.nxp.com. Acesso em: Abr/2007. [31] BEZERRA, C. G., “Localização de um Robô Móvel usando Odometria e Marcos Naturais”, Universidade Federal do Rio Grande do Norte, Centro de Tecnologia, Programa de Pós-Graduação em Engenharia Elétrica, Março, 2004. [32] RIBEIRO, M. I., “Localização em Robótica Móvel - Odometria”, Instituto Superior Técnico, Instituto de Sistemas e Robótica, Portugal, Outubro, 1999. [33] SOUZA, G. T., “Controle e Automação Industrial”, Escola Técnica Estadual Pedro Ferreira Alves, Curso de Mecatrônica, Mogi Mirim, Julho, 2004. Disponível em: http:// www.juliostampa.com.br/~junior/robotica/cai.pdf. Acesso em: Jul/2007. [34] MARCO, CANTÙ., “Dominando o Delphi 7: a Bíblia”. 1. ed. São Paulo: Makron Books, 2003. 896p. [35] ASSIS, W. O., GENOVA, W. J., GOMES, M. M., COELHO, A. D. “Aplicação de Tecnologias de Controle de Processos Contínuos e Processamento de Imagens no Futebol de Robôs”. Anais da Competição Brasileira de Robótica, Florianópolis – SC, 2007.